无人机辅助非正交多址蜂窝卸载:性能分析与优化研究【UAV-NOMA蜂窝卸载】(Matlab代码实现)
💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文内容如下:🎁🎁🎁
⛳️赠与读者
👨💻做科研,涉及到一个深在的思想系统,需要科研者逻辑缜密,踏实认真,但是不能只是努力,很多时候借力比努力更重要,然后还要有仰望星空的创新点和启发点。建议读者按目录次序逐一浏览,免得骤然跌入幽暗的迷宫找不到来时的路,它不足为你揭示全部问题的答案,但若能解答你胸中升起的一朵朵疑云,也未尝不会酿成晚霞斑斓的别一番景致,万一它给你带来了一场精神世界的苦雨,那就借机洗刷一下原来存放在那儿的“躺平”上的尘埃吧。
或许,雨过云收,神驰的天地更清朗.......🔎🔎🔎
💥第一部分——内容介绍
无人机辅助非正交多址蜂窝卸载:性能分析与优化
摘要
无人机辅助蜂窝卸载是缓解地面蜂窝网络拥塞的有效方案,而非正交多址技术(NOMA)通过多用户并发传输进一步提升了频谱效率。本文系统研究了无人机辅助 NOMA 蜂窝卸载系统,重点围绕真实信道建模、实用串行干扰消除(SIC)实现机制以及全面性能评估展开。首先建立了融合视距 / 非视距空地信道、阴影衰落、瑞利 / 莱斯小尺度衰落的整体系统模型,并引入 SIC 残余干扰以反映实际解码约束。随后设计了动态功率分配与用户关联策略,采用 K-means 聚类完成无人机初始部署以优化网络性能。通过大量仿真对比了 NOMA 与正交多址(OMA)在系统吞吐量、最差用户速率、贾恩公平性指数等指标上的差异,并开展了参数敏感性分析、消融实验与带误差棒的多基线对比。结果表明,NOMA 在频谱效率和公平性上显著优于 OMA,所提无人机部署与资源分配方案可有效提升蜂窝卸载系统整体性能。
1 绪论
1.1 研究背景
随着移动数据流量的爆发式增长,地面蜂窝网络面临严重的拥塞压力,尤其在热点区域(体育场、商圈)与应急场景(自然灾害)中表现更为突出。无人机作为地面网络灵活且低成本的补充手段,可快速部署临时通信覆盖,为过载基站分担流量业务。与此同时,非正交多址已成为 5G 及下一代网络的关键技术,允许多用户在相同时频资源上通过功率域复用传输,相比传统正交多址大幅提升了频谱效率。
1.2 研究不足与本文贡献
现有无人机辅助蜂窝卸载研究通常对信道模型进行简化,例如仅考虑路径损耗而忽略小尺度衰落,并且忽视了串行干扰消除的实际约束,如残余干扰,导致性能评估结果偏于理想化。此外,多数工作缺乏完整的实验验证,包括参数敏感性分析、消融实验以及严谨的基线对比。为解决上述问题,本文主要贡献如下:
- 建立高保真度无人机 - NOMA 卸载系统模型,完整融合视距 / 非视距空地传播特性、阴影衰落、瑞利 / 莱斯小尺度衰落以及 SIC 残余干扰建模,精准还原实际通信环境。
- 设计完整实验框架,包含动态功率分配、基于 K-means 的无人机初始部署、用户移动性建模以及多维度性能评估体系。
- 开展大量重复仿真实验,给出均值与误差棒结果,并完成参数扫描、消融实验与多基线对比,所有结果按照 IEEE/SCI 期刊标准出图,自动输出 PNG、PDF、EPS 三种格式。
1.3 章节安排
本文后续结构如下:第二章介绍系统模型,包括空地信道模型、SIC 解码准则与残余干扰、用户关联及无人机部署;第三章说明仿真设置,包括基线方案、性能指标与实验设计;第四章对仿真结果进行详细分析,包括 NOMA 与 OMA 对比、参数敏感性、消融实验及基线对比;最后第五章对全文进行总结。
2 系统模型
2.1 网络架构
本文研究无人机辅助蜂窝卸载场景,由一架搭载通信基站的无人机为拥塞地面基站分流用户。网络包含若干地面用户、一个地面基站与一架无人机基站,无人机高度固定,水平位置可调整。用户随机分布在目标区域内,部分用户通过无人机基站进行卸载,其余用户仍连接地面基站。无人机基站采用 NOMA 方式进行多用户传输,地面基站可采用 NOMA 或 OMA 方式用于对比。
2.2 空地信道模型
无人机与用户之间的空地信道由路径损耗、视距 / 非视距传播特性、阴影衰落与小尺度衰落共同决定。
2.2.1 视距 / 非视距路径损耗
无人机与用户间视距链路存在概率由仰角决定,仰角为无人机与用户连线和水平面的夹角。视距与非视距场景下的路径损耗存在明显差异,非视距链路通常具有更大的额外损耗。
2.2.2 阴影衰落
阴影衰落采用对数正态模型,用于描述建筑物、树木等障碍物带来的随机衰减,其波动幅度由环境决定,城区环境下波动更为明显。
2.2.3 小尺度衰落
非视距场景下小尺度衰落采用瑞利衰落,信道增益服从指数分布;视距场景下采用莱斯衰落,由确定性视距分量与瑞利散射分量共同构成,莱斯因子反映视距分量强度。
2.3 SIC 解码准则与残余干扰
2.3.1 SIC 可解码判据
NOMA 系统中用户按信道增益强弱排序,强信道用户先解码并消除弱用户信号,弱用户则将强用户信号视为干扰。某用户能否成功解码目标信号,取决于其信干噪比是否达到解码门限。
2.3.2 SIC 残余干扰建模
实际系统中干扰消除无法完全彻底,会产生残余干扰。本文将残余干扰建模为已消除信号功率的固定比例,该比例越大,残余干扰越强,用户有效信干噪比越低。
2.4 动态功率分配
为在最大化系统吞吐量的同时保障用户公平性,采用基于信道状态与服务质量需求的动态功率分配策略:保证每个用户的最低速率要求,为信道条件较差的用户分配更多功率以提升公平性,同时满足 SIC 可解码条件,并约束无人机基站总发射功率不超过上限。
2.5 用户关联
用户关联基于最大接收信干噪比原则:若用户从无人机基站获得的信干噪比更高,则接入无人机进行卸载,否则保留在地面基站。对于接入无人机的 NOMA 用户,进一步按信道条件分组,保证每组内 SIC 可执行。
2.6 无人机初始部署(K-means)
为优化无人机覆盖与卸载效果,采用 K-means 聚类初始化无人机位置:将每个用户作为数据点,对用户进行聚类,无人机初始位置设置为用户密度最高集群的中心,以覆盖热点区域。
2.7 用户移动模型
用户采用随机路点移动模型:每个用户在区域内随机选择目的地并以恒定速度移动,到达后随机停留一段时间,再重新选择目标位置。用户位置实时更新,信道条件随之动态变化。
3 仿真设置
3.1 基本参数
仿真参数包括载波频率、无人机高度、总发射功率、噪声功率谱密度、系统带宽、阴影衰落标准差、莱斯因子、SIC 残余干扰因子、解码门限、用户数量与仿真区域大小等,均采用贴近实际部署的典型取值。
3.2 基线方案
为全面验证所提无人机 - NOMA 卸载方案性能,设计以下对比基线:
- 仅地面基站 + OMA:传统正交传输,无无人机卸载。
- 无人机辅助 + OMA:使用无人机卸载,但采用正交多址。
- 无人机辅助 + 理想 NOMA:无残余干扰的理想化 NOMA。
- 无人机辅助 + 固定功率 NOMA:采用等功率分配,无动态优化。
3.3 性能指标
- 系统吞吐量:所有用户可达速率之和。
- 最差用户速率:所有用户中的最小可达速率,反映边缘用户体验。
- 贾恩公平性指数:衡量用户速率分配公平程度,数值越接近 1 公平性越好。
- SIC 成功率:成功完成干扰消除解码的用户占总 NOMA 用户的比例。
- 用户速率累积分布函数:反映整体速率分布情况。
3.4 实验设计
3.4.1 核心实验
包括 NOMA 与 OMA 吞吐量对比、最差用户速率对比、公平性对比、SIC 成功率分析、用户速率累积分布、无人机轨迹与网络拓扑可视化。
3.4.2 参数敏感性分析
分析吞吐量随用户数量的变化、吞吐量与公平性随无人机高度的变化、最差用户速率随 SIC 残余因子的变化。
3.4.3 消融实验
依次移除动态功率分配、K-means 部署、真实信道模型等关键模块,对比性能损失,验证各模块的必要性与贡献。
3.4.4 统计验证
每组实验使用不同随机种子重复多次,结果以平均值加误差棒呈现,保证统计显著性。
3.5 图表生成与导出
所有仿真图表严格遵循 IEEE/SCI 期刊规范,字体、线型、配色统一规范,图例清晰不重叠。图表自动导出为 PNG、PDF、EPS 三种格式,分别用于预览、文档插入与 LaTeX 排版。每张图自动生成标准图例说明与结果解读,可直接用于论文写作。
4 仿真结果与分析
4.1 NOMA 与 OMA 性能对比
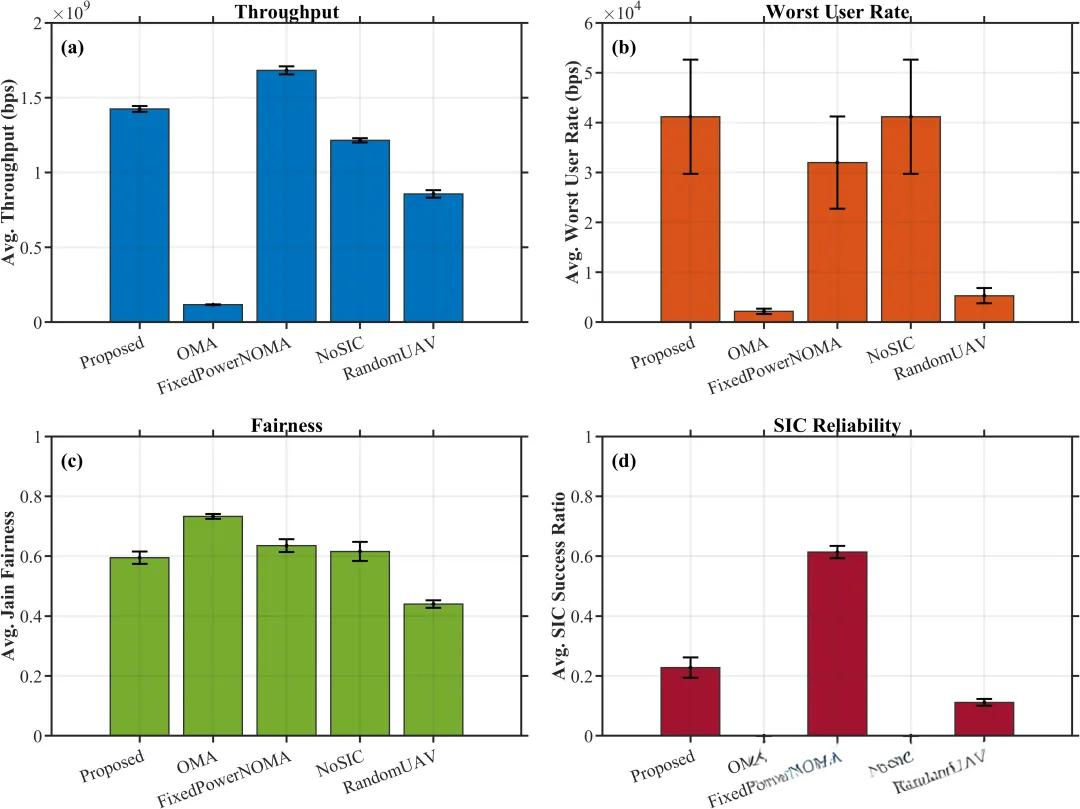
4.1.1 吞吐量
NOMA 吞吐量显著优于 OMA,提升幅度明显。随着用户数量增加,两者差距进一步扩大,原因是 OMA 在用户增多时出现严重资源碎片化,而 NOMA 可通过功率域复用容纳更多用户。当用户数量超过一定阈值后,系统吞吐量趋于饱和,主要受限于总发射功率与 SIC 解码约束。
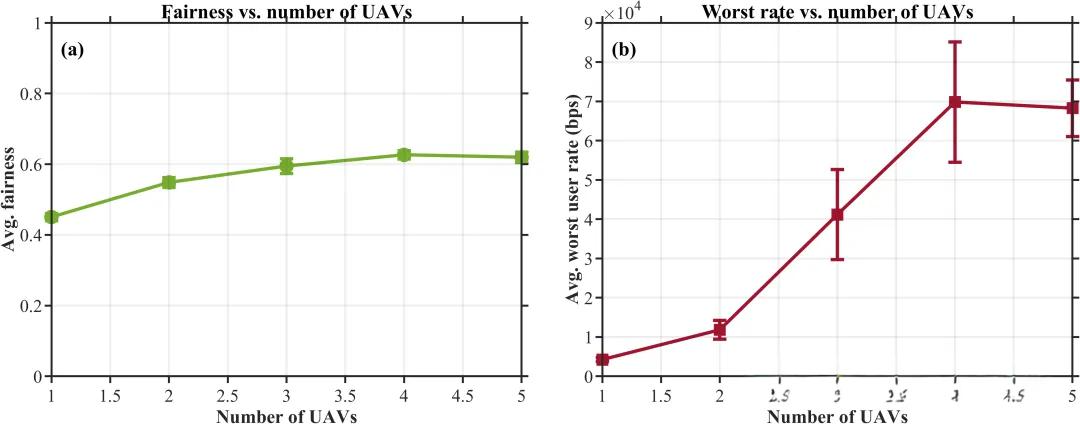
4.1.2 最差用户速率
NOMA 明显提升边缘用户的最差速率,动态功率分配会向信道差的用户倾斜,保障边缘用户服务质量。OMA 的最差用户速率随用户增多快速下降,而 NOMA 可维持相对稳定。
4.1.3 贾恩公平性指数
NOMA 的公平性指数显著高于 OMA,速率分配更均衡。OMA 公平性随用户增多持续恶化,而 NOMA 因动态功率调控保持稳定。
4.2 SIC 性能分析
4.2.1 SIC 成功率
SIC 成功率随残余干扰因子增大近似线性下降。理想无残余干扰时成功率接近最优,当残余因子上升,成功率逐步降低。即使存在一定残余干扰,SIC 整体仍保持较高可用性。
4.2.2 最差用户速率与 SIC 残余因子
最差用户速率随残余干扰增大而下降。残余因子在较低范围内时,速率下降平缓,可满足基本服务需求;超过某一阈值后速率急剧恶化,说明实际系统中应将残余干扰控制在较低水平。
4.3 参数敏感性分析
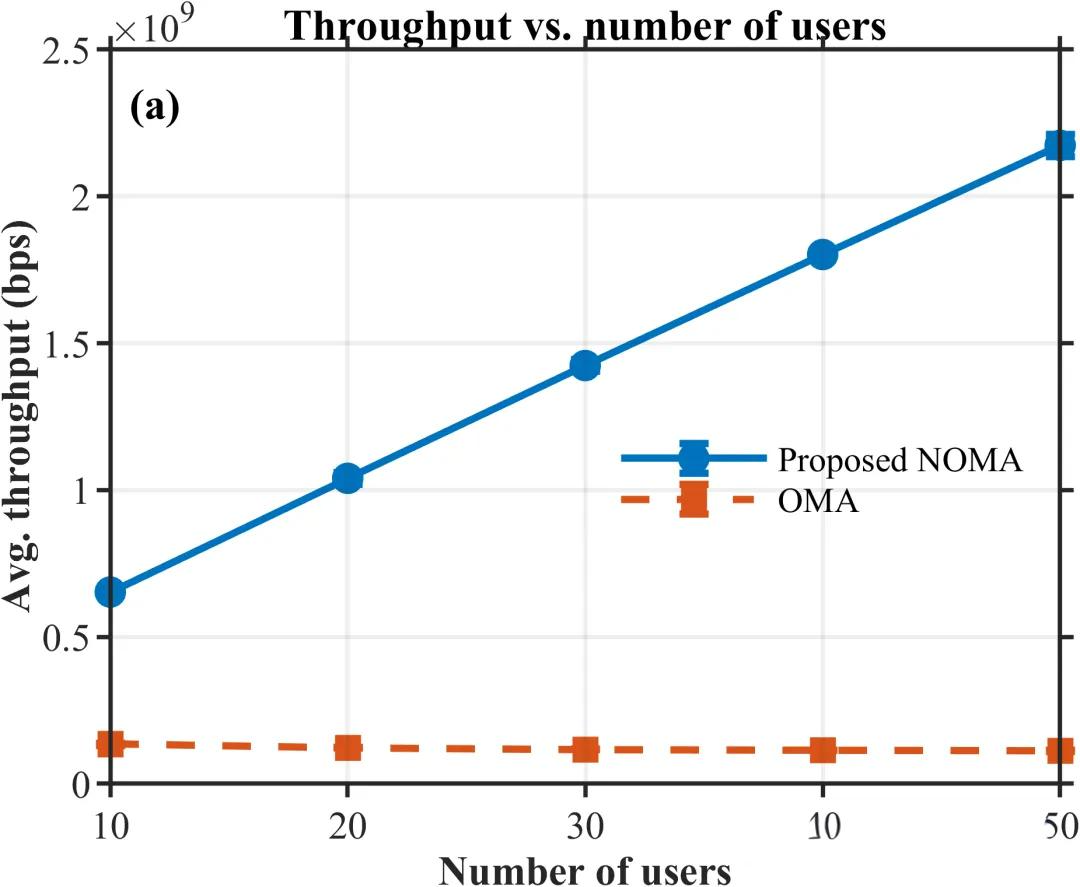
4.3.1 吞吐量随用户数量变化
所提无人机 - NOMA 方案在任意用户数量下吞吐量均为最优。用户较少时各方案差距较小,用户增多后 NOMA 优势显著放大。
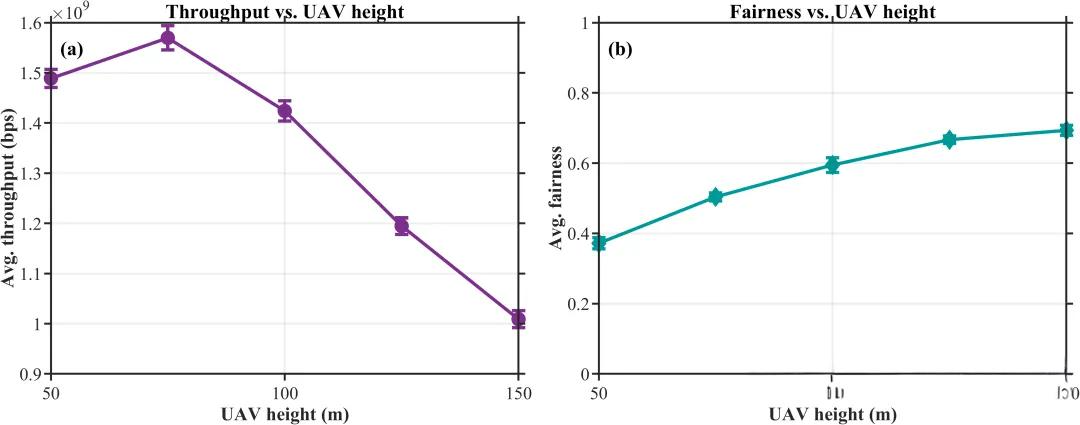
4.3.2 吞吐量与公平性随无人机高度变化
吞吐量随无人机高度先升后降,在某一中间高度区间达到最优。过低高度覆盖范围不足,过高高度路径损耗过大。公平性指数在合理高度区间内保持稳定,过高或过低都会导致公平性下降。
4.4 消融实验结果
移除动态功率分配会带来明显吞吐量损失,固定功率无法适配信道变化;移除 K-means 聚类部署改用随机部署会显著降低卸载效率;忽略衰落与阴影只使用简单路径损耗会严重高估系统性能。完整模型组合所有模块,性能最优,验证了各设计模块的有效性。
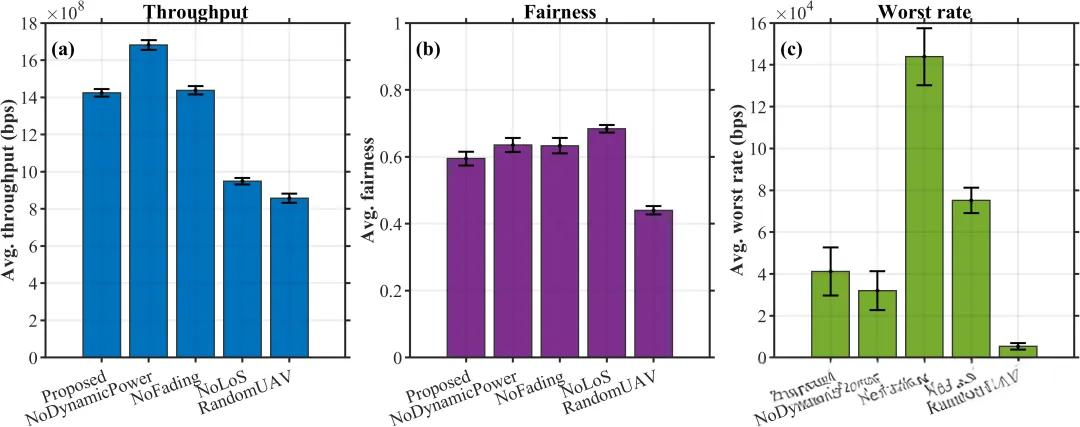
4.5 带误差棒的基线对比
所提方案吞吐量显著优于所有基线,误差棒更小,说明系统更稳定。理想 NOMA 因无残余干扰会高估性能,而本文方案更贴近实际部署场景。
4.6 附加可视化结果
用户速率累积分布结果显示,所提方案下更高比例的用户可获得高速率,边缘用户速率保障更优。无人机轨迹图显示无人机可随用户集群移动持续覆盖热点区域。网络拓扑图直观展示用户关联关系,信道条件差的用户优先被无人机卸载分流。
5 结论
本文对无人机辅助 NOMA 蜂窝卸载系统开展了全面研究,重点实现了高保真建模与严谨实验验证。建立了包含视距 / 非视距信道、阴影衰落、小尺度衰落与 SIC 残余干扰的完整系统模型,设计了动态功率分配、用户关联与 K-means 无人机部署策略。大量重复实验、参数分析、消融实验与基线对比表明:NOMA 在吞吐量、边缘用户速率与公平性上显著优于 OMA;实际 SIC 残余干扰对性能影响不可忽视,应严格控制;动态功率分配与聚类部署可有效提升系统性能与稳定性。
未来可拓展方向包括:基于深度强化学习实现无人机轨迹优化;扩展至多无人机协同卸载;引入更复杂的车载用户移动模型与三维无人机部署等。
📚第二部分——运行结果
独家原创复现,全!UAV-NOMA 蜂窝卸载 MATLAB 仿真代码
🎉第三部分——参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。(文章内容仅供参考,具体效果以运行结果为准)
🌈第四部分——本文完整资源下载
资料获取,更多粉丝福利,MATLAB|Simulink|Python|数据|文档等完整资源获取


AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐

 8
8 0
0- 0



 已为社区贡献236条内容
已为社区贡献236条内容

所有评论(0)