AI导读AI论文:Pointer-CAD: Unifying B-Rep and Command Sequences via Pointer-based Edges & Faces Selection
一段话总结
Pointer-CAD是由多所高校和企业联合提出的基于大语言模型(LLM)的CAD生成框架,核心创新为基于指针的命令序列表示,将B-rep模型的几何信息融入序列建模,解决了传统命令序列法无法支持面/边实体选择、连续变量离散化导致拓扑误差的问题;该框架采用多步生成策略,通过多模态融合模块、LLM序列生成、向量转换模块实现文本到CAD模型的转化,还搭建了含575,559个CAD模型的Recap-OmniCAD+数据集,实验表明其在命令准确率、几何重建保真度、拓扑一致性上显著优于Text2CAD、CADmium等基线方法,大幅降低了分割误差(SegE)和量化误差,首次让自回归方法支持倒角(chamfer)、倒圆(fillet)等工业级CAD操作,同时保持了更高效的生成速度和更短的令牌序列。
思维导图
## **研究背景与问题**
- CAD设计的工业重要性与手动建模的低效性
- 现有CAD生成方法的两类主流方向:命令序列/代码生成
- 传统方法核心缺陷:无实体选择能力、量化误差导致拓扑错误
- 代码生成法的弊端:令牌序列长、推理时间久
## **核心创新:指针基命令序列**
- 三类令牌:Label Token/Value Token/Pointer
- 指针机制:直接引用B-rep的面/边,实现实体精准选择
- 三大操作步骤:草图-拉伸/倒角/倒圆
- 优势:支持倒角倒圆、降低量化误差、简化草图平面选择
## **Pointer-CAD框架设计**
- 多步生成策略:每步基于文本描述+前序B-rep结果
- 三大核心模块:多模态融合/LLM序列生成/向量转换
- 多模态融合模块:B-rep编码器(面邻接图)+GNN特征聚合
- LLM训练:基于Qwen2.5,LoRA微调,双预测头(令牌/指针)
- 训练损失:标签值交叉熵损失+指针对比损失
## **数据集构建**
- 标注流水线:Blender渲染+Qwen2.5-VL生成描述+Qwen2.5生成建模指令
- 核心数据集:Recap-OmniCAD+(575,559个,含倒角倒圆)
- 其他数据集:Recap-DeepCAD(176,439个)、Recap-OmniCAD
- 标注特点:保留实际参数/单位,无几何归一化,提升任务挑战性
## **实验验证**
- 实验基线:Text2CAD、CADmium、DeepCAD、通用LLM(GPT/Claude等)
- 评价指标:F1、CD、SegE、FluxEE、IR、DangEL、SIR等
- 核心结果:0.5B模型优于7B CADmium,SegE降至0.11/0.13,支持倒角倒圆F1达89.85/99.22
- 消融实验:GNN组件提升弧面F1,归一化会降低IR,指针机制减少量化误差
## **局限性与未来工作**
- 现有局限:仅支持文本条件生成、未涉及装配级建模、非流形拓扑易出错
- 未来方向:融合多模态输入(图像/点云)、支持装配关系、优化非流形拓扑处理
## **核心贡献**
- 提出指针基命令序列,实现面/边选择,支持倒角倒圆,降低量化误差
- 设计Pointer-CAD框架,多步生成+B-rep与文本的联合条件
- 构建大规模含工业操作的CAD数据集,提升任务真实性
- 实验证明模型在拓扑精度、几何保真度上显著优于现有方法
详细总结
本文发表于arXiv(2603.04337v1),由香港大学、上海科技大学、加州大学伯克利分校等机构联合研究,提出了Pointer-CAD框架,解决了传统LLM基CAD生成方法的实体选择缺失、量化误差导致拓扑错误的核心问题,实现了文本驱动的复杂工业级CAD模型生成,以下为详细内容:
一、研究背景与现存问题
- CAD技术是现代工程制造的核心,但传统手动建模流程(2D草图→3D操作→B-rep存储)耗时费力,亟需自动化生成方法。
- 现有LLM基CAD生成方法分为命令序列生成和代码生成两类,各有缺陷:
- 代码生成法(如CadQuery):支持操作多,但令牌序列长(平均424.75个)、推理时间久(平均4.72-6.61s),训练和推理效率低;
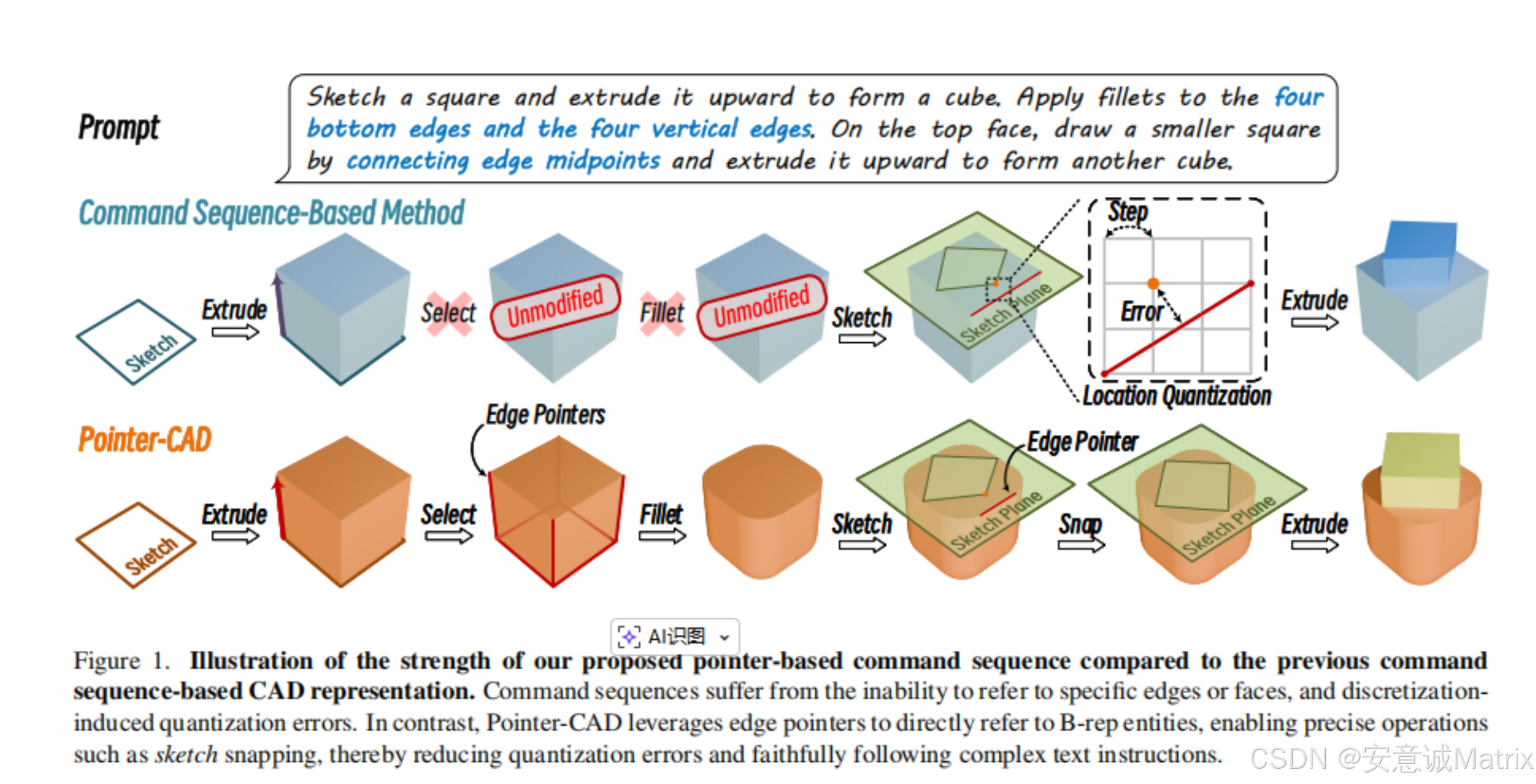
- 命令序列法(如DeepCAD、Text2CAD):令牌短、速度快,但无法支持倒角/倒圆等需要实体选择的操作,且连续变量离散化会产生量化误差,破坏模型拓扑保真度。
- 现有方法均未将B-rep模型的几何信息与序列建模有效融合,导致几何对齐误差和拓扑不连续。
二、核心创新:基于指针的命令序列表示
为解决上述问题,受Pointer Networks启发,提出指针基命令序列表示,首次将B-rep的面、边几何信息显式融入命令序列,核心设计如下:
- 三类令牌定义:所有令牌分为Label Token(操作语义,如表示拉伸开始)、Value Token(数值参数,如坐标/半径,量化为2^q位整数)、Pointer(指针,直接引用B-rep中的面/边),三类令牌组合定义具体操作;
- 三大基础操作步骤:将CAD建模分解为三类原子步骤,均通过指针实现几何依赖:
- 草图-拉伸组合:通过指针选择草图平面,替代传统6参数表示,将3D旋转回归转为离散面选择,降低对齐误差;
- 倒角操作(C:(p,c)):指针p选择目标边,c为倒角距离;
- 倒圆操作(F:(p,f)):指针p选择目标边,f为倒圆半径;
- 核心优势:实现面/边的精准实体选择,支持倒角/倒圆等工业级操作;通过指针吸附B-rep几何元素,大幅降低量化误差,提升几何连通性和对齐精度。
三、Pointer-CAD框架整体设计
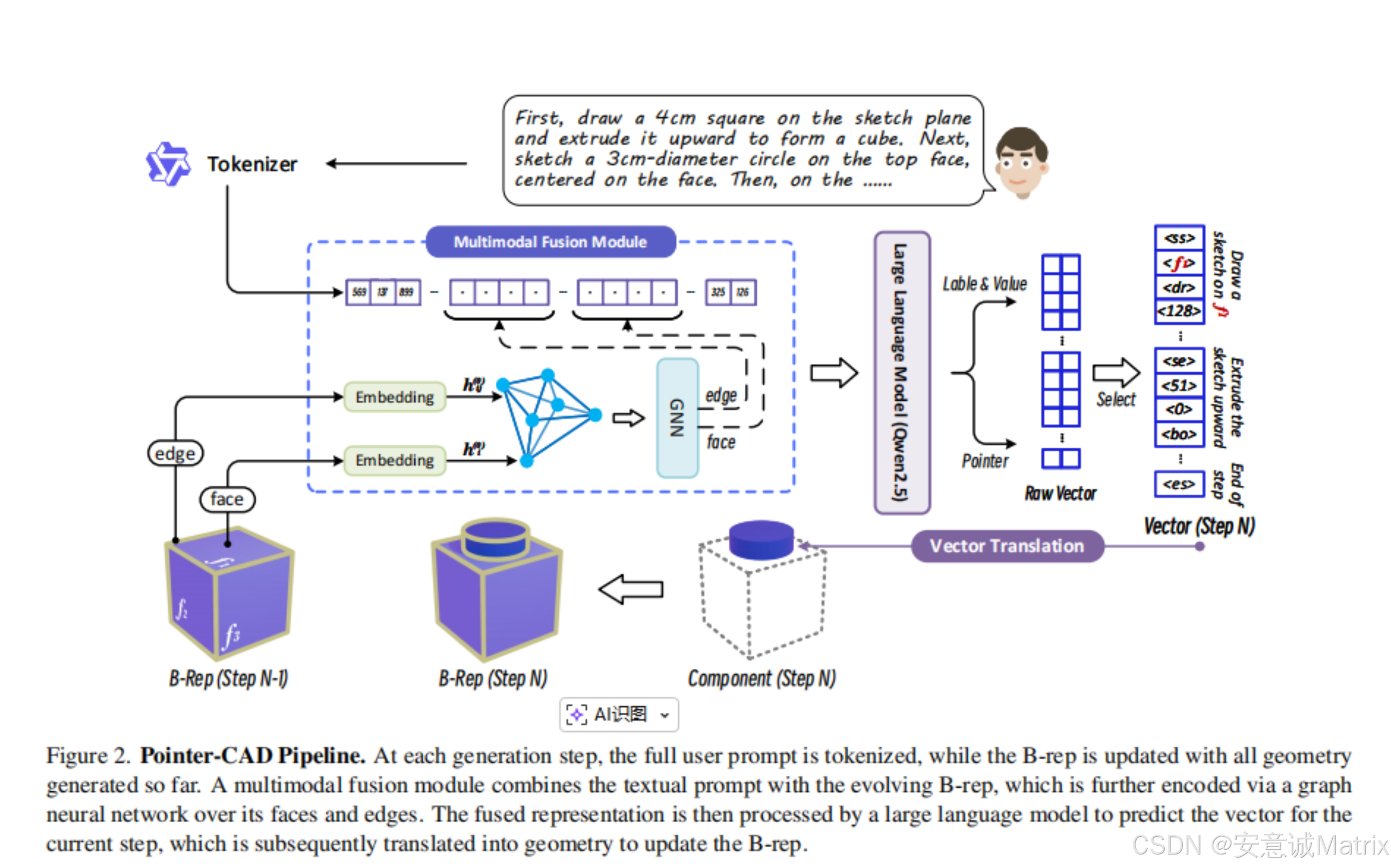
框架采用多步自回归生成策略,每一步的生成均以文本描述和前序步骤生成的B-rep模型为条件,保证全局一致性,核心由三大模块组成,同时设计了专属训练损失:
- 多模态融合模块
- 文本处理:令牌化后全程复用,首次步骤仅以文本为条件;
- B-rep编码器:将B-rep表示为无向面邻接图G(V,E),面/边分别采样32×32/32个点,提取3D坐标、法向量等几何特征,生成128维嵌入;
- GNN特征聚合:通过K层图神经网络聚合面/边的局部特征,边特征额外结合多头注意力(MHA)捕捉顶点依赖,最终将面/边嵌入序列化输入LLM。
- LLM序列生成模块
- 基础模型:采用Qwen2.5为骨干,通过LoRA低秩微调减少可训练参数;
- 双预测头设计:一个头预测Label/Value Token,一个头输出128维指针嵌入,通过余弦相似度匹配B-rep的面/边候选;
- 指针引用规则:几何等价实体(共面/共线)均为有效指针,提升鲁棒性。
- 向量转换模块:将LLM生成的命令序列按规则转换为可执行的CAD操作,更新B-rep模型,为下一步生成提供条件。
- 训练损失函数
- 标签/值令牌损失(Lv\mathcal{L}_vLv):带标签平滑的交叉熵损失,分类任务;
- 指针损失(Lp\mathcal{L}_pLp):对比损失,处理多有效指针的场景,引入可学习温度参数τ;
- 总损失(L=λv⋅Lv+λp⋅Lp\mathcal{L}=\lambda_v \cdot \mathcal{L}_v+\lambda_p \cdot \mathcal{L}_pL=λv⋅Lv+λp⋅Lp):默认λv=λp=0.5\lambda_v=\lambda_p=0.5λv=λp=0.5,等权重融合。
四、数据集构建与标注流水线
为训练和验证Pointer-CAD,设计了自动化数据标注流水线,并基于现有数据集扩展构建了大规模专属数据集,核心细节:
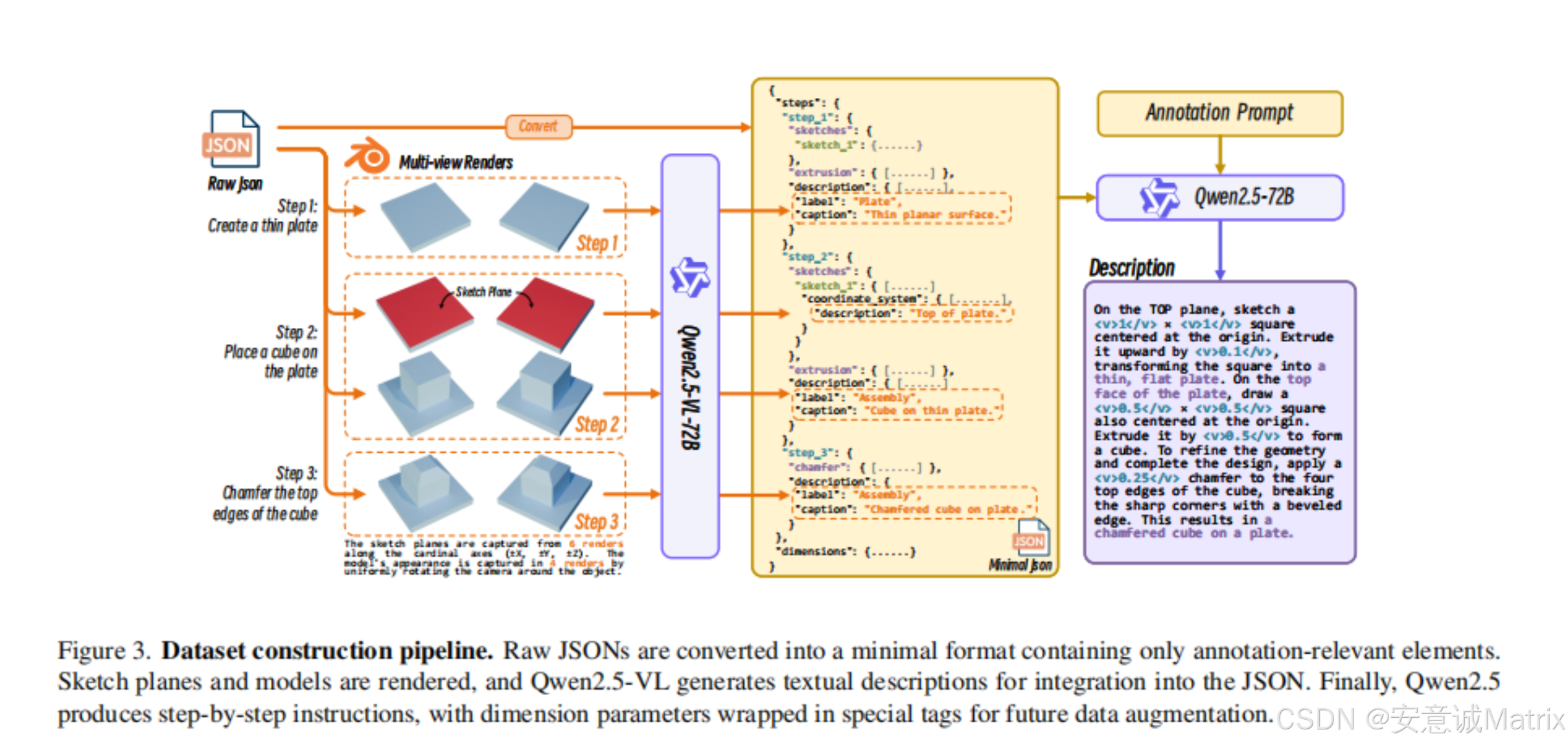
- 标注流水线:①用Blender为每个模型渲染多视角图像;②Qwen2.5-VL生成全局形状描述和草图平面空间描述;③将原始JSON转为极简格式,保留核心参数;④Qwen2.5生成带参数标签的分步建模指令,保留实际单位和参数,不做几何归一化;
- 核心数据集统计
数据集名称 模型数量 核心特点 Recap-DeepCAD 176,439 基于DeepCAD标注,无倒角/倒圆 Recap-OmniCAD+ 575,559 基于OmniCAD扩展,含倒角/倒圆,工业级操作 Recap-OmniCAD - 无倒角/倒圆,作为基线对比 - 数据集优势:包含倒角、倒圆等传统数据集缺失的工业操作,保留实际参数和单位,提升了任务的真实性和挑战性,更贴合工业场景。
五、实验验证与结果分析
实验围绕文本驱动CAD生成展开,对比主流基线方法,从定量、定性、消融实验多维度验证模型性能,核心设置和结果如下:
- 实验设置
- 基线方法:Text2CAD、CADmium、DeepCAD、通用LLM(GPT-5.2、Claude Opus、Gemini 4、Qwen3);
- 评价指标:F1(命令准确率)、CD(倒角距离,几何保真度)、SegE(分割误差,拓扑正确性)、FluxEE(密封质量)、IR(无效率)、DangEL(悬边长度)、SIR(自交率)等;
- 模型规模:Pointer-CAD(0.5B/1.5B),对比CADmium(7B)等大模型。
- 核心定量结果
- 在Recap-DeepCAD数据集上,Pointer-CAD-0.5B的SegE降至0.13,CD mean为3.81,均显著低于基线;0.5B模型性能优于7B的CADmium,体现了框架设计的优越性;
- 在Recap-OmniCAD+数据集上,Pointer-CAD唯一支持倒角/倒圆操作,倒角F1达99.22,倒圆F1达89.85,其他基线方法完全无法支持;
- 与通用LLM对比,Pointer-CAD的IR仅8.67%,远低于GPT的23.90%、Claude的29.75%,生成的CAD模型可执行性和几何一致性大幅提升。
- 消融实验
- GNN组件:移除GNN后,Arc F1从85.70降至67.14,证明GNN能有效捕捉复杂几何结构;
- 量化误差:Pointer-CAD在各量化位宽下的CD均低于Text2CAD,指针机制有效减少离散化误差;
- 归一化影响:对Recap-DeepCAD做几何归一化后,所有模型IR大幅下降,说明基线方法依赖数据集模式记忆,而非真正的几何推理。
- 定性结果
- Pointer-CAD能精准复现含倒角/倒圆的复杂CAD模型,几何细节与真实值高度匹配;
- 基线方法常出现特征缺失、空间排列错误、拓扑不连续等问题,无法完成工业级操作。
六、局限性与未来工作
- 现有局限性
- 仅支持文本条件生成,未融合图像、点云等工业常用的多模态输入;
- 仅针对单部件建模,未涉及装配级建模(如配合约束、层级依赖);
- 对非流形拓扑处理能力弱,此类结构会导致指针选择模糊,引发操作错误;
- 偶尔出现部件位置偏移,导致最终模型与真实值存在微小差异。
- 未来研究方向
- 融合多模态感知:将指针基生成与图像、点云等多模态输入结合,适配工业实际工作流;
- 支持装配级建模:引入装配关系、配合约束,实现从单部件到整机的CAD生成;
- 优化非流形拓扑处理:提升框架对复杂拓扑结构的鲁棒性;
- 交互式编辑:基于指针机制开发人机交互编辑功能,支持用户手动选择面/边并结合文本指令建模。
七、研究核心贡献
- 提出基于指针的命令序列表示,首次实现B-rep面/边的显式选择,支持倒角/倒圆等工业级CAD操作,同时大幅降低量化误差和拓扑错误;
- 设计了Pointer-CAD框架,采用多步生成策略,将文本描述与B-rep几何信息联合作为生成条件,实现了文本到CAD模型的高精度转化;
- 构建了**Recap-OmniCAD+**大规模数据集(575,559个模型),包含倒角/倒圆等工业操作,保留实际参数和单位,提升了CAD生成任务的真实性;
- 大量实验证明,Pointer-CAD在命令准确率、几何保真度、拓扑一致性上均显著优于现有方法,0.5B小模型即可超越7B级基线模型,同时保持高效的生成速度(平均2.13s/模型)。
关键问题
问题1:Pointer-CAD解决传统LLM基CAD生成方法的核心痛点是什么?具体通过什么机制实现?
答案:核心痛点有两个,一是传统命令序列法无法支持倒角、倒圆等需要显式选择面/边实体的工业级编辑操作;二是连续变量离散化产生的量化误差,导致几何对齐错误、拓扑不连续。具体通过基于指针的命令序列表示机制解决:1. 引入Pointer令牌,直接引用B-rep模型中的面/边几何实体,实现精准的实体选择,从而支持倒角/倒圆操作;2. 通过指针将草图、拉伸等操作的预测结果吸附到B-rep的几何元素上,将传统3D旋转回归问题转为离散的面/边选择问题,大幅降低量化误差和几何对齐误差,提升拓扑保真度。
问题2:Pointer-CAD的多步生成策略与传统单步生成方法相比,核心优势是什么?其框架中实现该策略的关键设计是什么?
答案:核心优势是每一步生成均以文本描述和前序步骤的B-rep模型为联合条件,而非单步生成整个模型,保证了CAD模型的全局几何一致性和设计语义的忠实性,避免了单步生成中因缺乏几何上下文导致的特征缺失、拓扑错误。实现该策略的关键设计:1. 框架的向量转换模块会将每一步生成的命令序列转为可执行CAD操作,实时更新B-rep模型,为下一步生成提供几何上下文;2. 多模态融合模块会对每一步的B-rep模型重新编码(面邻接图+GNN特征聚合),并与文本令牌融合后输入LLM,让模型能感知前序几何结果;3. 采用自回归生成方式,逐步构建模型,符合CAD手动建模的工程逻辑,降低复杂模型的生成难度。
问题3:Pointer-CAD在实验中展现出的性能优势体现在哪些方面?为何0.5B的Pointer-CAD能超越7B规模的CADmium等基线模型?
答案:第一,性能优势主要体现在四方面:1. 拓扑正确性:SegE降至0.11/0.13,远低于基线,量化误差和拓扑不连续问题大幅缓解;2. 工业操作支持:唯一能实现倒角/倒圆操作,F1分别达99.22和89.85,其他基线完全不支持;3. 几何保真度:CD mean/median显著低于基线,模型几何细节与真实值高度匹配;4. 效率与轻量化:0.5B模型生成速度快(2.13s/模型)、令牌序列短(110.72个),同时性能优于7B级基线。第二,0.5B模型超越大模型的核心原因:1. 核心表示创新:指针基命令序列将B-rep几何信息与序列建模深度融合,相比传统纯数值命令序列,更贴合CAD建模的几何逻辑,大幅提升了模型的几何推理能力,而非单纯依赖模型规模;2. GNN特征聚合:通过面邻接图+GNN有效捕捉了B-rep的几何和拓扑特征,为LLM提供了精准的几何上下文,弥补了模型规模的不足;3. 针对性训练设计:基于LoRA微调,双预测头(令牌/指针)的设计让模型能高效学习CAD操作的语义和几何依赖,对比损失和交叉熵损失的联合训练提升了指针选择和令牌预测的精度;4. 数据集优势:Recap-OmniCAD+数据集包含工业级操作,保留实际参数,让模型学习到更贴合实际的CAD建模规律,而非基线方法依赖的归一化数据集模式。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐

 11
11 0
0- 0



 已为社区贡献5条内容
已为社区贡献5条内容

所有评论(0)