混合动力系统 Simulink 控制策略模型探索
串联式、并联式、混联式混合动力系统simulink控制策略模型(串联式、并联式、混联式每个都是独立的需要单独说拿哪个,默认是混联式RB) 有基于逻辑门限值、状态机的规则控制策略(RB)、基于等效燃油消耗最小的控制策略(ECMS)、基于动态规划的控制策略(DP)、基于极小值原理的控制策略(PMP)、基于非线性模型预测控制的控制策略(NMPC)等 ①(工况可自行添加)已有WLTC、UDDS、NEDC工况; ②仿真图像包括 发动机转矩变化图像、电机转矩变化图像、工作模式变化图像、档位变化图像、电池SOC变化图像、等效百公里燃油消耗量图像、速度跟随图像、车速变化图像; ③整车similink模型中包含工况输入模型、驾驶员模型、发动机模型、电机模型、制动能量回收模型、转矩分配模型、运行模式切换模型、档位切换模型纵向动力学模型. 提前咨询,各个模型price不一
在汽车技术不断演进的今天,混合动力系统凭借其出色的燃油经济性和环保性能,成为了汽车行业的热门研究领域。其中,串联式、并联式和混联式混合动力系统各有千秋,今天咱们主要探讨一下混联式 RB(这里默认讨论的混联式为 RB 类型)。同时,咱们还会深入了解基于逻辑门限值、状态机的规则控制策略(RB)、基于等效燃油消耗最小的控制策略(ECMS)、基于动态规划的控制策略(DP)、基于极小值原理的控制策略(PMP)以及基于非线性模型预测控制的控制策略(NMPC)等。
一、混合动力系统类型
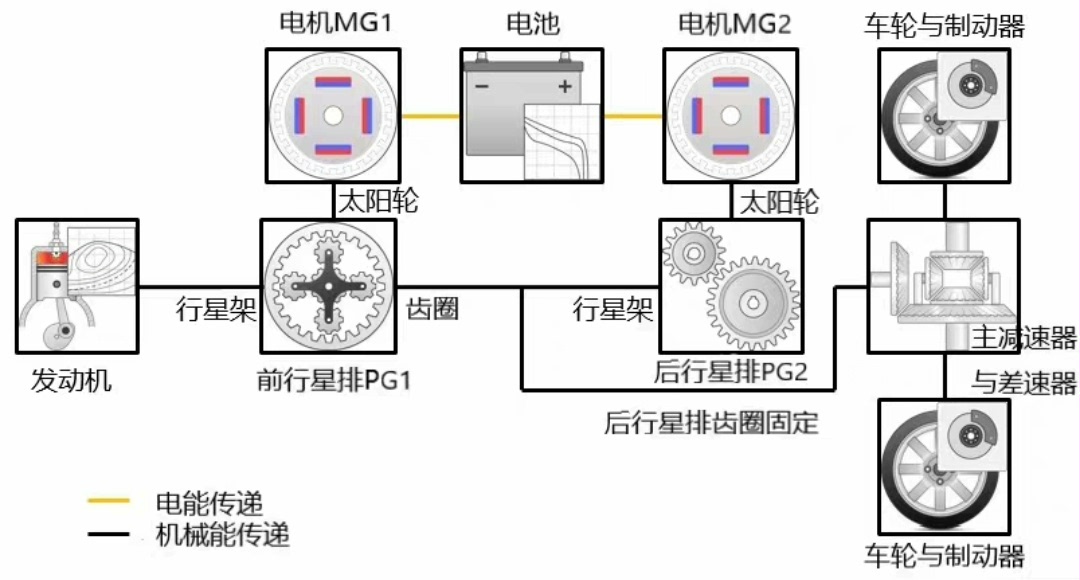
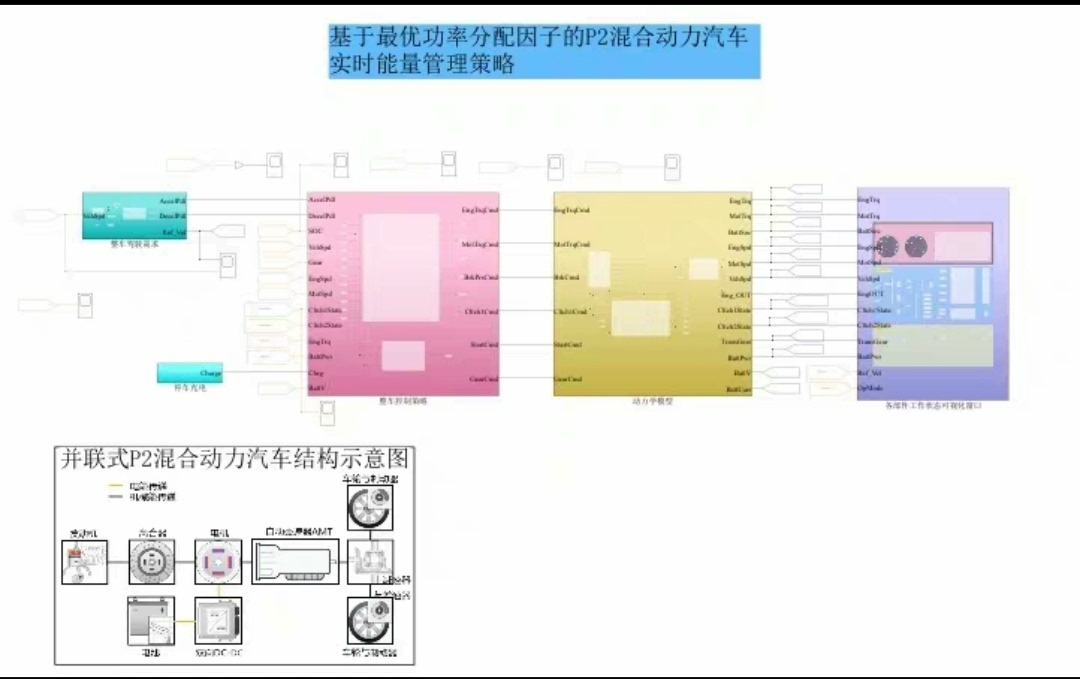
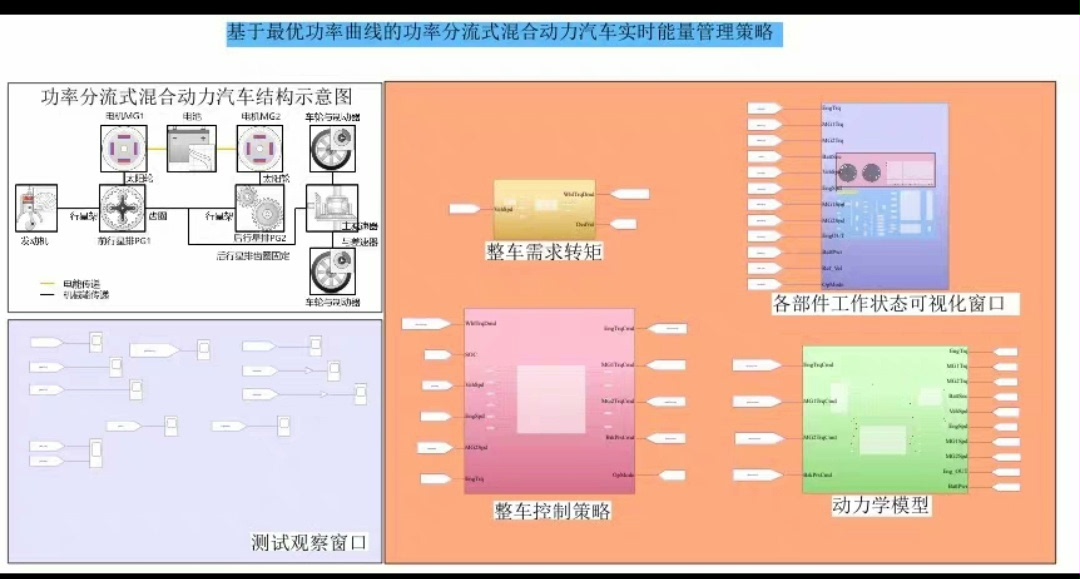
混联式混合动力系统(RB)
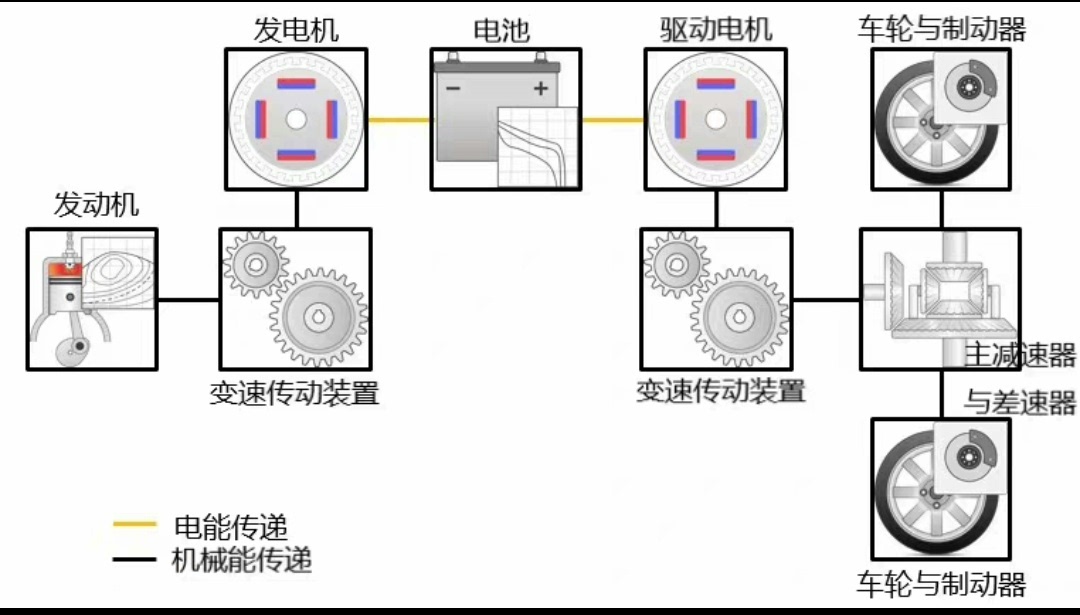
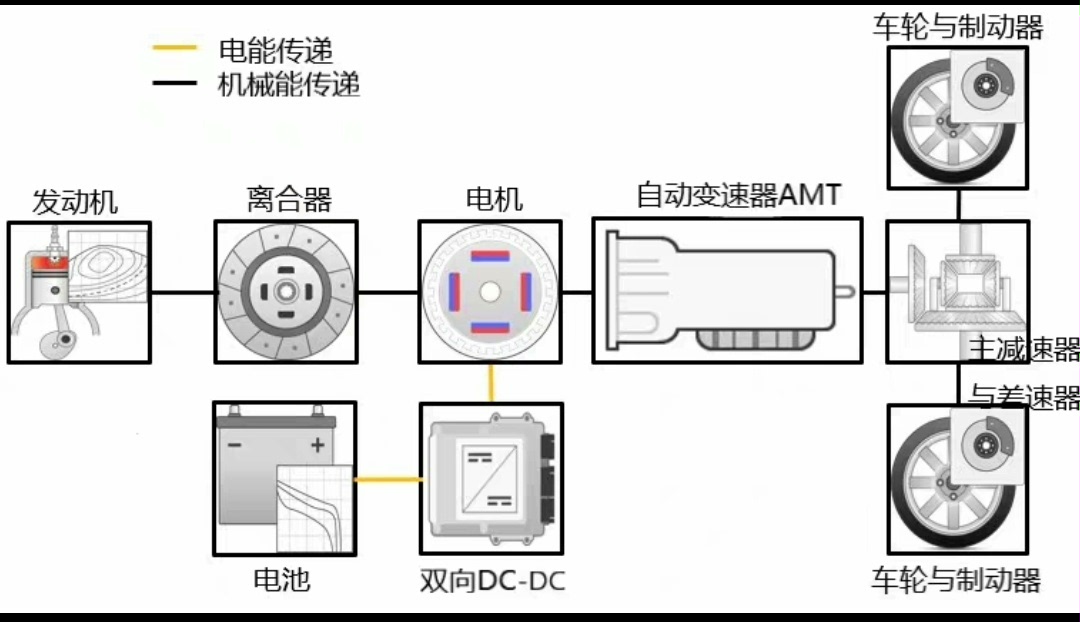
混联式混合动力系统结合了串联式和并联式的优点,车辆可以在串联、并联以及纯电动等多种模式下运行。它通过复杂的动力耦合机构,灵活地分配发动机和电机的动力输出,以适应不同的行驶工况。例如,在城市拥堵的低速工况下,车辆可以纯电模式运行,减少发动机的低效工作时间;而在高速巡航时,发动机可以直接驱动车辆,同时为电池充电。
二、控制策略
基于逻辑门限值、状态机的规则控制策略(RB)
这种控制策略主要依据预先设定的门限值和状态机规则来决策发动机和电机的工作状态。比如,当电池 SOC(State of Charge,荷电状态)低于某个门限值且车速较高时,发动机启动为电池充电并辅助驱动车辆;当车速较低且电池 SOC 充足时,车辆以纯电模式运行。下面我们来看一段简单的伪代码示例(非 Simulink 实际代码,但逻辑类似):
if (SOC < SOC_threshold_low && speed > speed_threshold_high)
engine_status = 'on';
motor_status = 'assist';
elseif (SOC > SOC_threshold_high && speed < speed_threshold_low)
engine_status = 'off';
motor_status = 'drive';
else
% 其他复杂情况处理
end基于等效燃油消耗最小的控制策略(ECMS)
ECMS 的核心思想是将电池的电能消耗等效为燃油消耗,通过优化算法使整车的等效燃油消耗最小。它会实时计算发动机和电机不同工作点下的等效燃油消耗,然后选择最优的工作点进行转矩分配。这个过程需要精确的发动机和电机模型,以及对车辆行驶工况的实时估计。虽然代码实现较为复杂,但大致思路如下:
% 假设已经有函数可以计算发动机和电机不同转矩下的等效燃油消耗
for each possible engine torque (Te)
for each possible motor torque (Tm)
total_equivalent_fuel_consumption = calculate_equivalent_fuel_consumption(Te, Tm);
if (total_equivalent_fuel_consumption < min_fuel_consumption)
min_fuel_consumption = total_equivalent_fuel_consumption;
optimal_Te = Te;
optimal_Tm = Tm;
end
end
end基于动态规划的控制策略(DP)
DP 是一种经典的优化算法,它通过将整个行驶过程划分为多个阶段,在每个阶段对发动机和电机的转矩进行优化选择,以达到全局最优的目标。DP 需要知道整个行驶工况的信息,这在实际应用中有一定局限性,但在仿真研究中具有重要意义。代码实现时,需要构建状态转移方程和代价函数等:
% 假设已经定义好状态转移函数和代价函数
for k = 1:num_stages
for each state (i)
for each control input (j)
next_state = state_transition_function(i, j, k);
cost = cost_function(i, j, k);
J(k, i, j) = cost + minimum(J(k + 1, next_state, :));
end
end
end基于极小值原理的控制策略(PMP)
PMP 是一种基于最优控制理论的方法,通过求解哈密顿函数的极小值来确定发动机和电机的最优控制输入。它与 DP 类似,但求解方式有所不同,计算量相对较小,更适合实时控制。以下是简单的原理相关代码示意:
% 定义哈密顿函数
H = lambda * f(x, u) + g(x, u);
% 求解哈密顿函数关于控制输入 u 的极小值
[u_optimal] = minimize(H, u);基于非线性模型预测控制的控制策略(NMPC)
NMPC 考虑了系统的非线性特性,通过建立非线性预测模型对未来的系统状态进行预测,并在每个采样时刻求解一个有限时域的优化问题,以确定当前时刻的最优控制输入。这种方法可以更好地适应复杂的车辆动力学和工况变化,但计算量较大。代码实现中涉及到非线性模型的建立和优化求解:
% 建立非线性预测模型
nonlinear_model = @(x, u) [x_dot1; x_dot2;...];
% 定义优化目标函数
objective_function = @(u, x) sum((x - x_ref).^2) + sum(u.^2);
% 求解优化问题得到最优控制输入
[u_optimal] = solve_nonlinear_optimization_problem(nonlinear_model, objective_function);三、工况与仿真图像
工况选择
我们可以在仿真中使用 WLTC、UDDS、NEDC 等工况,当然也可以根据实际需求自行添加工况。不同的工况模拟了不同的行驶场景,比如 WLTC 更贴近实际道路行驶工况,包括城市、郊区和高速公路等多种路况;UDDS 则主要模拟城市拥堵工况。
仿真图像
- 发动机转矩变化图像:它直观地展示了在不同工况下发动机转矩的实时变化,帮助我们分析发动机在整个行驶过程中的工作状态和负荷情况。
- 电机转矩变化图像:反映了电机在不同时刻提供或吸收的转矩,这对于研究电机在混合动力系统中的助力和能量回收作用至关重要。
- 工作模式变化图像:清晰地呈现车辆在串联、并联、纯电等不同工作模式之间的切换时刻和持续时间,有助于评估控制策略对工作模式切换的合理性。
- 档位变化图像:展示了车辆档位随着车速和工况的变化情况,对传动系统的优化设计和控制策略的调整提供参考。
- 电池 SOC 变化图像:实时反映电池的电量变化,是衡量混合动力系统能量管理效果的重要指标。
- 等效百公里燃油消耗量图像:直接体现了整车的燃油经济性,通过不同控制策略下该图像的对比,可以评估各种策略的优劣。
- 速度跟随图像:用于观察车辆实际速度对设定工况速度的跟随程度,反映了控制系统的跟踪性能。
- 车速变化图像:直观展示车辆在整个行驶过程中的速度变化趋势,结合其他图像可以深入分析车辆的动力性能。
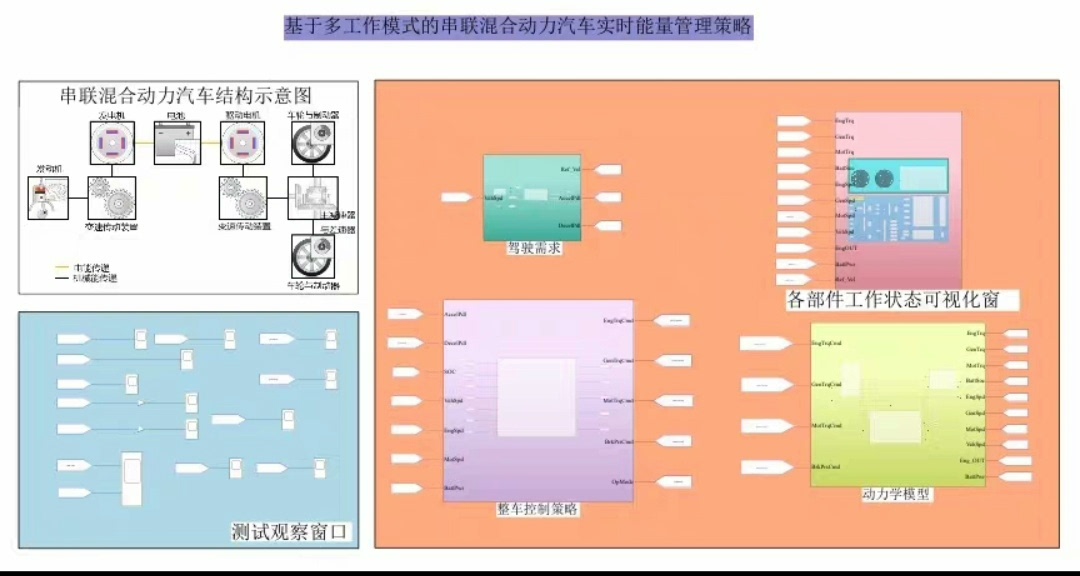
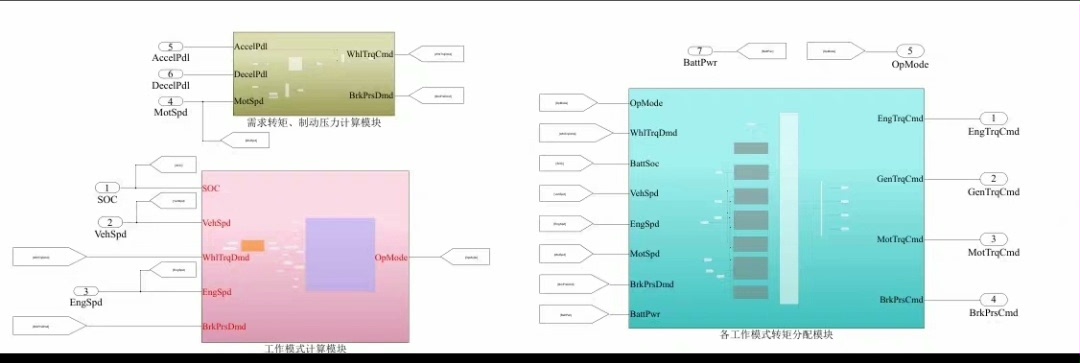
四、整车 Simulink 模型
整车 Simulink 模型是实现上述控制策略和工况仿真的关键。它包含多个重要模型:
- 工况输入模型:负责将选定的工况数据输入到整个模型中,模拟实际行驶过程中的速度变化。
- 驾驶员模型:根据工况和车辆状态,模拟驾驶员的操作,如加速、减速、换挡等。
- 发动机模型:精确模拟发动机的转矩输出、燃油消耗等特性,是混合动力系统的重要动力源模型。
- 电机模型:描述电机的电动和发电两种工作模式下的性能,包括转矩、转速、效率等。
- 制动能量回收模型:在车辆制动时,将部分机械能转化为电能存储在电池中,提高能量利用率。
- 转矩分配模型:依据控制策略,合理分配发动机和电机的转矩输出,以满足车辆的动力需求。
- 运行模式切换模型:根据车辆状态和控制策略,实现串联、并联、纯电等工作模式的平稳切换。
- 档位切换模型:根据车速、发动机转速等参数,控制车辆的档位切换,确保传动系统的高效运行。
- 纵向动力学模型:综合考虑车辆的质量、阻力、驱动力等因素,模拟车辆在纵向方向上的运动状态。
最后需要提前说明的是,各个模型由于其复杂程度和功能不同,开发和使用的 price 也会有所差异。在实际应用中,需要根据项目需求和预算来选择合适的模型。希望通过这篇博文,能让大家对混合动力系统的 Simulink 控制策略模型有更深入的了解,一起探索这个充满魅力的领域。
串联式、并联式、混联式混合动力系统simulink控制策略模型(串联式、并联式、混联式每个都是独立的需要单独说拿哪个,默认是混联式RB) 有基于逻辑门限值、状态机的规则控制策略(RB)、基于等效燃油消耗最小的控制策略(ECMS)、基于动态规划的控制策略(DP)、基于极小值原理的控制策略(PMP)、基于非线性模型预测控制的控制策略(NMPC)等 ①(工况可自行添加)已有WLTC、UDDS、NEDC工况; ②仿真图像包括 发动机转矩变化图像、电机转矩变化图像、工作模式变化图像、档位变化图像、电池SOC变化图像、等效百公里燃油消耗量图像、速度跟随图像、车速变化图像; ③整车similink模型中包含工况输入模型、驾驶员模型、发动机模型、电机模型、制动能量回收模型、转矩分配模型、运行模式切换模型、档位切换模型纵向动力学模型. 提前咨询,各个模型price不一


AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐

 22
22 0
0- 0



 已为社区贡献61条内容
已为社区贡献61条内容

所有评论(0)