Github 2万star的超级明星项目,只为解决这件事……(ICLR 2026)

2000块的机械臂+开源代码,凭什么挑战Franka上万的“贵族”方案?
——终结“手搓”Pipeline
目录
机器人学习的赛道上,研究者们正面临一场旷日持久的“内战”——硬件平台各立山头,软件中间件互不兼容,数据集与算法实现更是五花八门。
Hugging Face团队新开源的Lerobot,就是想在这个乱局里做个“缝合者”。
它用一套统一的接口和工具链,把过去分散、封闭的环节串了起来。
无论是低成本的SO-100手臂,还是复杂的仿人机械手,都能接入同一套控制API;ACT、Diffusion Policy乃至π0等主流算法,也有了可复现的PyTorch参考实现。
此外,其核心优势在于降低门槛,行100 内可完成模型训练,40 行内可部署预训练模型。
01 机器人需要新范式
机器人领域长久以来存在着两种开发范式:经典机器人学与机器人学习。
-
前者依赖精确的物理模型进行规划控制,在工业等结构化场景中表现优异,但在多变的真实世界中则显得捉襟见肘;
-
后者采用数据驱动的端到端策略,被视为通往通用智能的希望,却深受生态碎片化之苦。
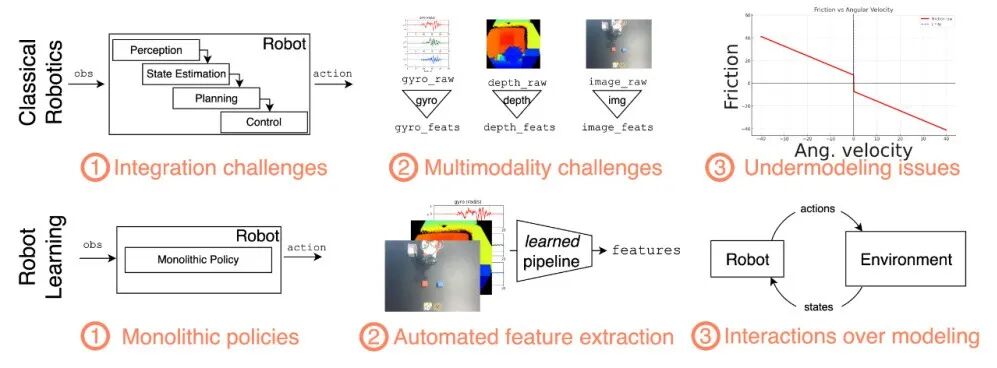
▲图1 | 两种机器人学范式的对决。上方的经典方法如同一个由多个独立专家(感知、规划、控制)组成的委员会,流程复杂且难以应对意外。下方的机器人学习则像一个经过大量实战训练的“全能士兵”,直接根据观察采取行动,更加灵活高效。LeRobot正是为了给这位“士兵”提供标准化的训练装备和作战平台。
LeRobot的出现,提供了一个垂直整合式的解决方案,通过统一的接口和标准,将原本孤立的硬件、数据和算法模块串联起来,形成一个高效协作的整体。
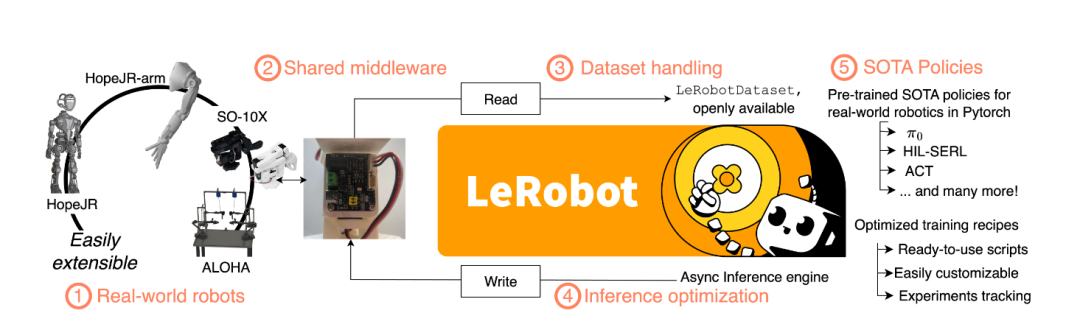
▲图2 | LeRobot的五大核心支柱。
该框架清晰地展示了其如何整合:
(1) 真实世界的机器人硬件;(2) 跨平台的共享中间件;(3) 标准化的数据处理流程;(4) 为真实部署优化的推理引擎;以及 (5) 即插即用的SOTA策略库。
从而构建了一个完整的端到端学习生态。
这种设计理念的转变,研究者不再需要为每个新机器人、新任务重写大量底层代码,而是可以在一个统一的平台上,将精力聚焦于更高层次的创新。
02 技术亮点
亮点一:引爆社区力量的开放生态
它首先将硬件门槛降至“冰点”,优先支持了一系列低成本、易于获取的开源机器人,如售价仅225欧元的SO-100/101机械臂。
这使得个人开发者和小型实验室也能参与到最前沿的研究中。
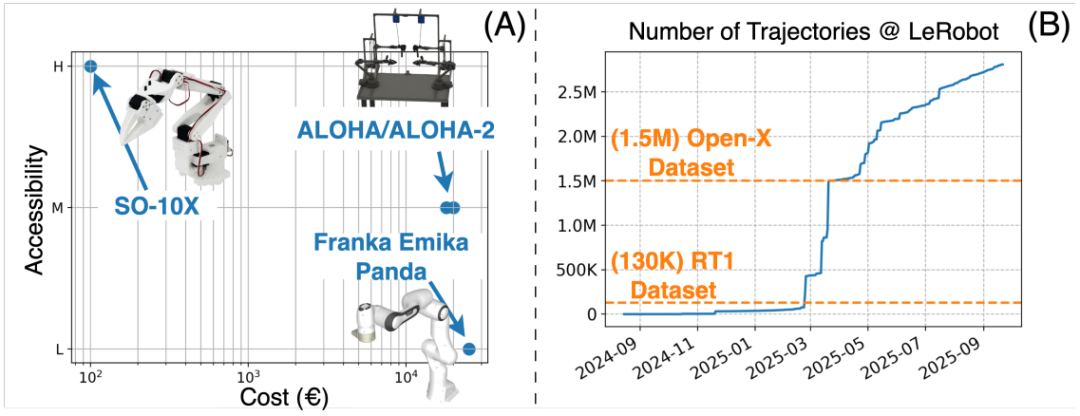
▲图3 | 成本与可及性的革命。左图展示了LeRobot支持的低成本开源机器人(如SO-10X)与昂贵的工业级机械臂在成本上的巨大差异。右图则揭示了惊人的成果:LeRobot社区收集的轨迹数量在短短数月内便超越了谷歌的Open-X和RT1等大型数据集的总和,展现了去中心化社区的强大力量。
而且,LeRobot建立了一个名为LeRobotDataset的社区驱动型数据中心。
截至2025年9月,该平台已汇聚了超过2200名贡献者的1.6万个数据集,总轨迹数突破200万条。
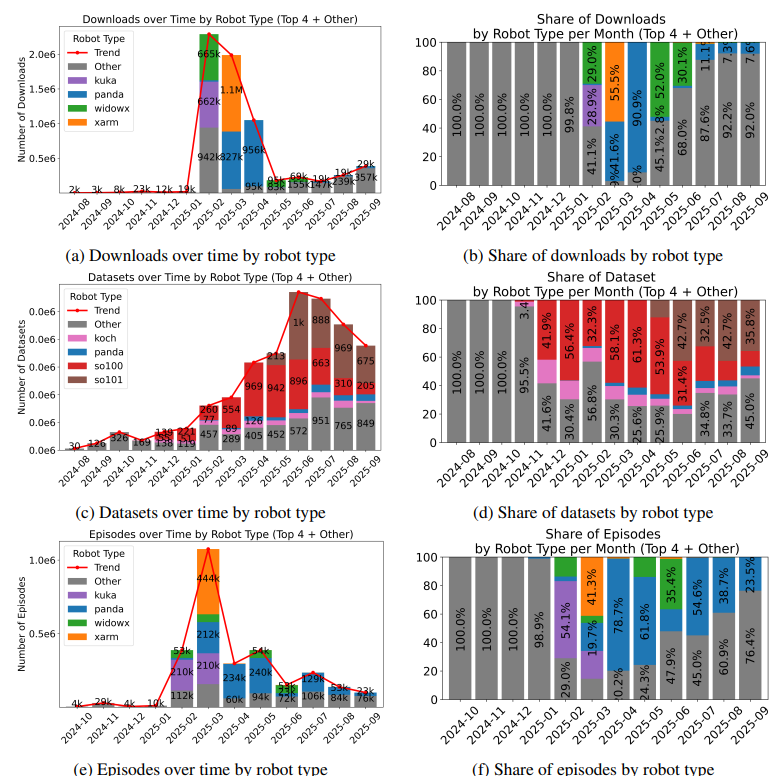
▲图4 | 数据生态指数级增长。这组图表生动地记录了LeRobot社区在数据集下载量、数据集数量和轨迹片段总数上的迅猛增长曲线。
亮点二:为真实部署解耦的异步推理引擎
在真实机器人上部署大型AI模型时,推理延迟是非常致命的。一个复杂的决策模型可能需要数百毫秒才能生成一个动作,而机器人控制器则需要以几十毫秒的频率稳定接收指令。这种速度上的“剪刀差”会导致机器人动作卡顿,甚至产生危险。
LeRobot为此设计了一套异步推理架构。
它将耗时的“动作预测”(PolicyServer)与高频的“动作执行”(RobotClient)彻底解耦。
前者可以在云端或本地的强大GPU上运行,提前计算好一连串的动作序列;后者则在机器人本地轻量化运行,以固定的高频率从一个“动作缓冲区”中平滑地取出并执行指令。
这种“生产者-消费者”模式,完美地屏蔽了网络与模型推理带来的延迟抖动,确保了机器人在真实世界中动作的流畅与精准。
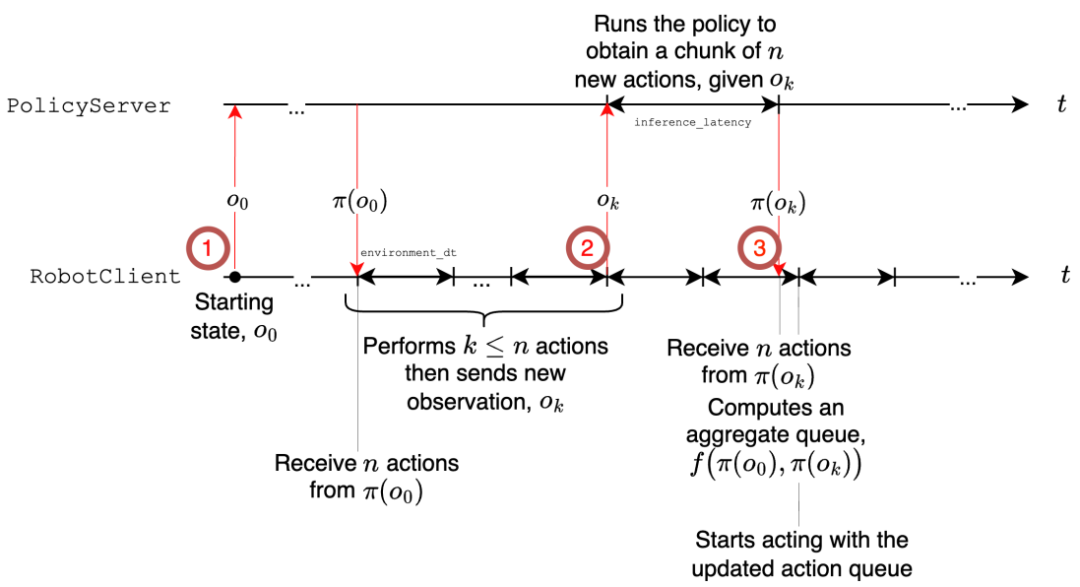
▲图5 | 解决延迟问题的“缓冲”妙计。该图展示了LeRobot的异步推理流程。PolicyServer作为“生产者”,持续生成动作块(action chunks)。RobotClient作为“消费者”,从队列中稳定地获取并执行动作。这种解耦设计,使得即使策略推理存在较大延迟,机器人也能保持高频、流畅的动作输出。
亮点三:SOTA算法库与极简实现
LeRobot为研究者提供了“开箱即用”的SOTA算法库。
无论是基于模仿学习的ACT、Diffusion Policy,还是基于强化学习的HIL-SERL,亦或是像π₀、SmolVLA这样的大型通用策略,都提供了官方的、少于100行代码的训练脚本和少于40行代码的推理实现。
这极大地降低了算法的使用和复现门槛。
数据显示,基于模仿学习的ACT策略因其高效易用,在社区中的模型上传和下载量上均占据主导地位,而更新的VLA模型(如SmolVLA)也呈现出快速增长的趋势,表明LeRobot能够有效加速新算法的普及与迭代。
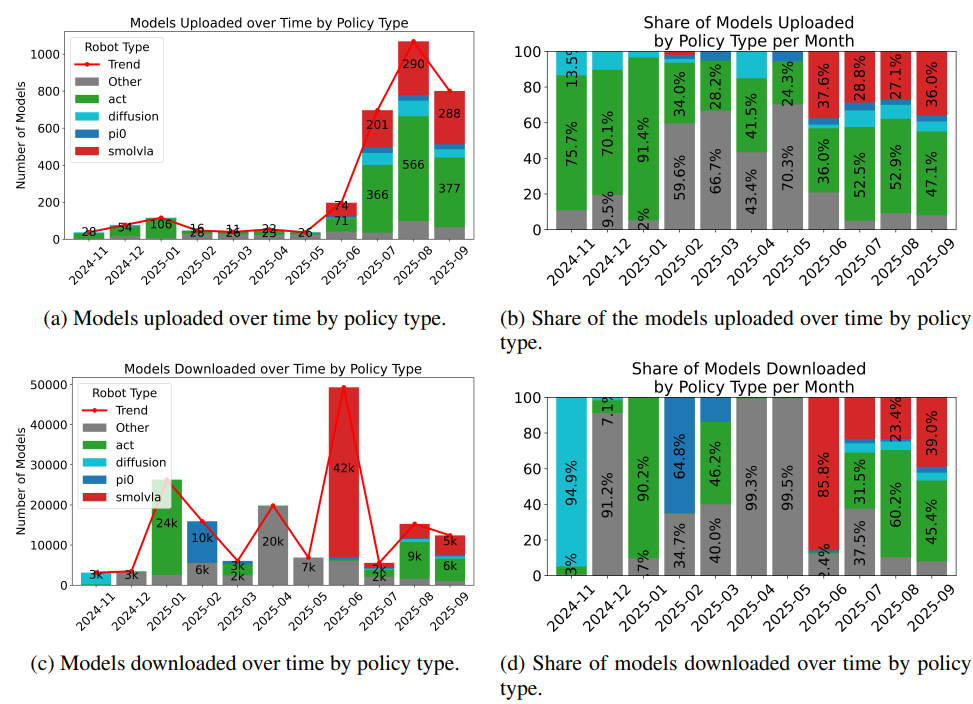
▲图6 | 社区算法的流行趋势。左侧图表显示,在社区上传的模型中,ACT(绿色)和VLA(红色)占据了绝大多数。右侧的下载量趋势也证实了这一点,ACT与VLA策略的下载量遥遥领先。这表明LeRobot成功地为社区提供了一个易于使用和分享主流算法的平台。
03 更多LeRobot数据表现
作为框架性工作,LeRobot的价值体现在其赋能社区的能力上。论文的核心数据有力地证明了这一点:
-
数据规模的碾压:在不到一年的时间里,LeRobot社区贡献的轨迹数量就达到了约220万条,超Google历时多年积累的Open-X数据集(150万条)和RT1数据集(13万条)。
并且这个数量还在随着时间不断地爆炸增长,未来也许这里是VLA最大的“数据仓库”,成为又一个“ImageNet”。
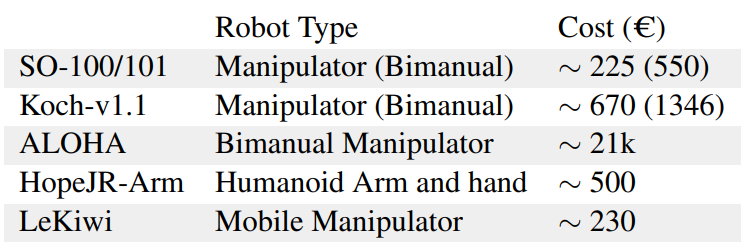
▲图7 | 机器人成本控制与数据集数量一览
-
硬件成本的颠覆:社区贡献数据中超过50%来自SO-10X系列机器人,其硬件成本仅为225-550欧元,不到传统研究平台(如Franka Emika,成本超1万欧元)的一个零头。

▲图8 | 推理耗时分析
-
推理性能的保证:框架内置的异步推理引擎,使得即便是参数量高达35亿的π₀模型,在RTX 4090上的推理延迟也能控制在约209毫秒,而轻量级的ACT模型更是低至5毫秒,完全满足真实机器人高频控制的需求。
至此,一个由低成本硬件、开放数据和高效软件驱动的良性循环正在形成,机器人学习的门槛正在被前所未有地拉低。
04 总结与延伸
LeRobot的发布,是机器人学习领域从“作坊时代”迈向“工业化时代”的一个重要标志。
它通过提供一套从硬件到算法的端到端统一标准,直击当前领域发展的生态碎片化痛点。
你认为LeRobot能否成为机器人领域的“GitHub”,开启一个属于机器人的“大模型时代”?
Ref
论文标题:LeRobot: An Open-Source Library for End-to-End Robot Learning
论文链接:https://arxiv.org/abs/2602.22818
github:https://github.com/huggingface/lerobot

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐



 9
9 0
0- 0



 已为社区贡献78条内容
已为社区贡献78条内容

所有评论(0)