MPC主动悬架模型:从理论到实践的探索
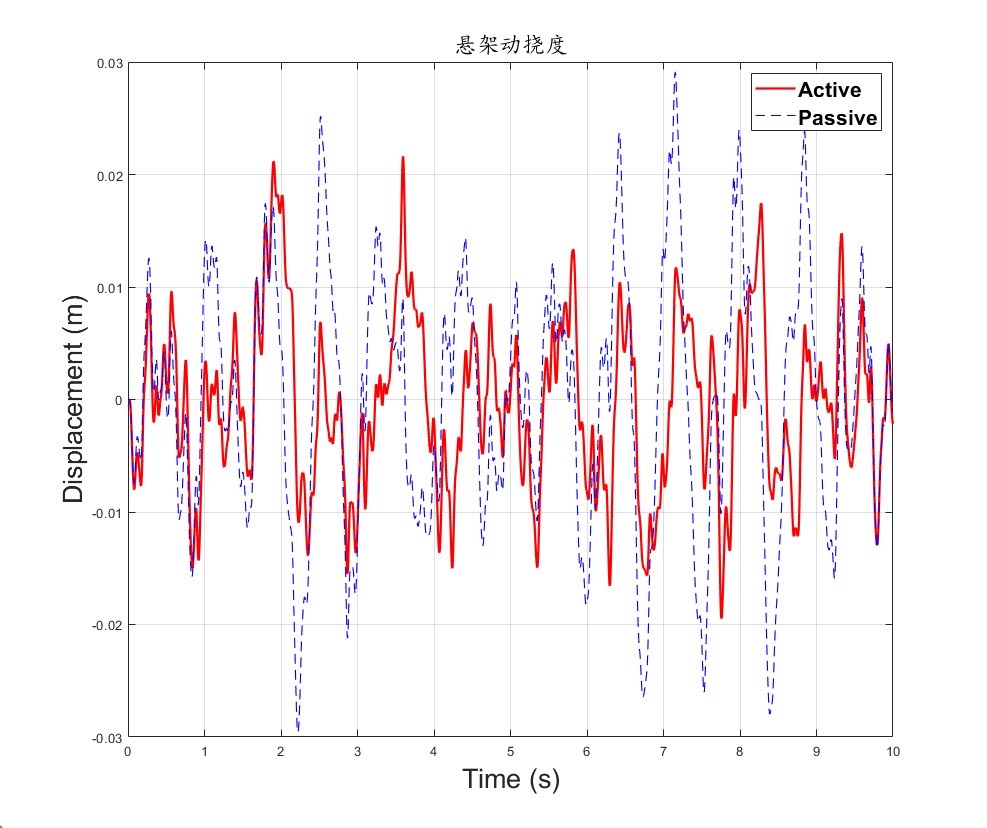
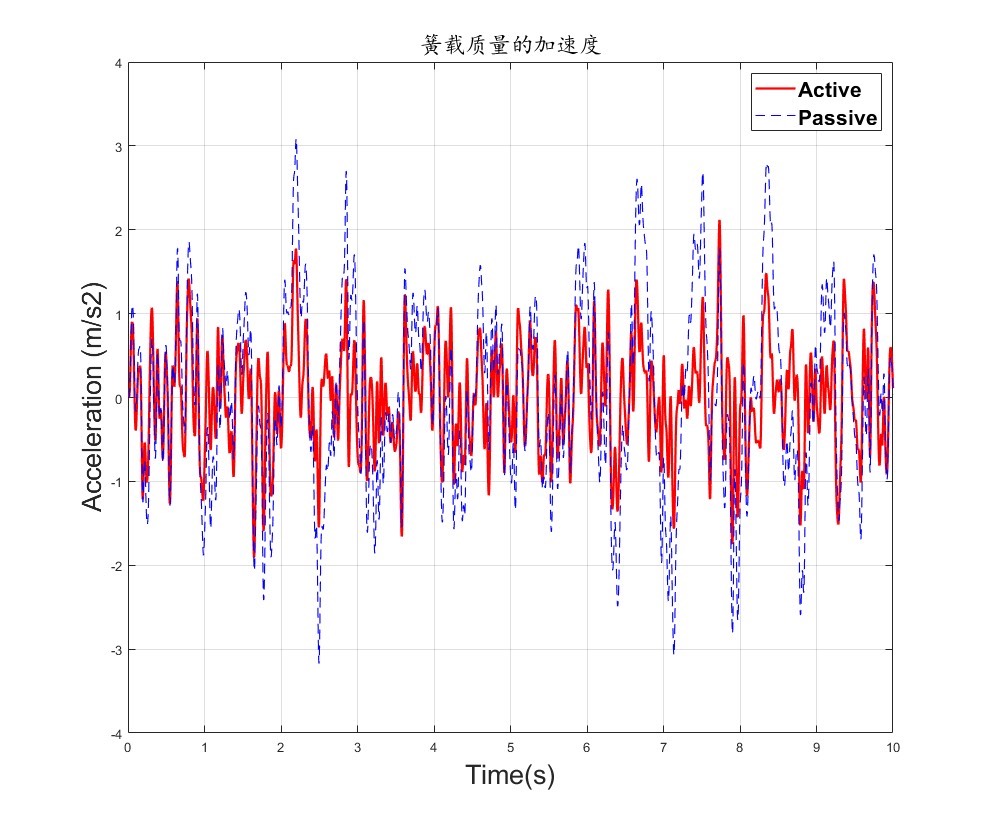
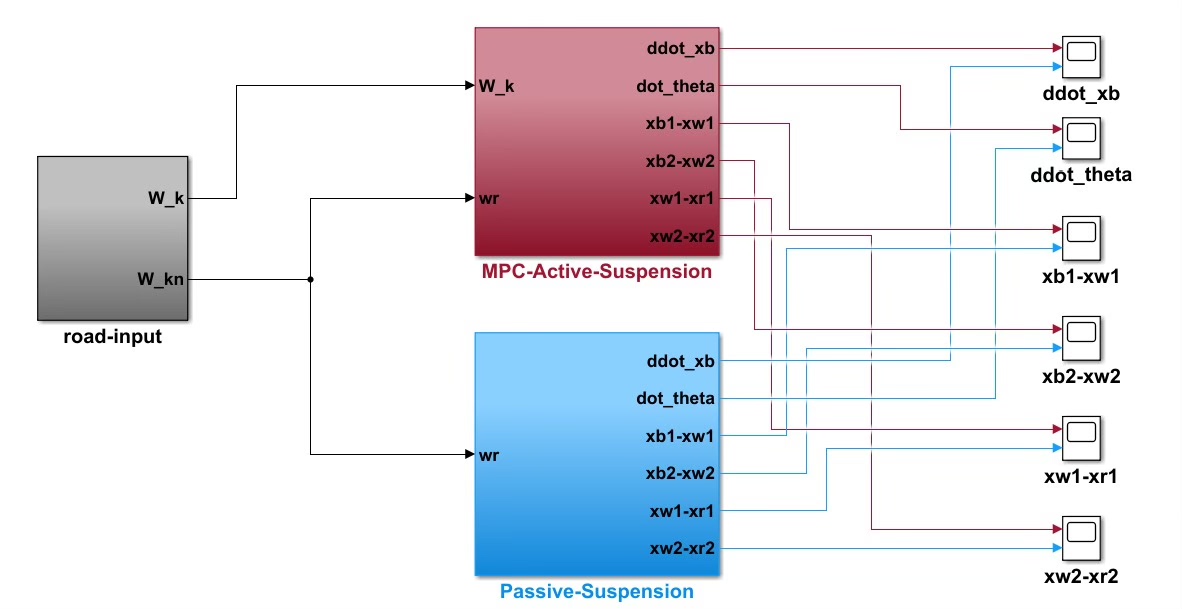
模型预测控制(MPC)主动悬架模型 MPC是一种根据模型预测的方式滚动优化的控制方法,依据自定义权重大小,通过二次规划求解,实现最优的控制效果。 模型预测控制算法在simulink中编写,对比主/被动悬架如簧载质量加速度、悬架动挠度、俯仰角速度等变量以观察MPC控制器控制效果。 模型中有多个路面可供选择-c级路面、减速带等。 matlab代码中包括画图代码,可以将悬架性能指标绘制出来。 2自由度(1/4)主动悬架模型: 4自由度(半车)主动悬架模型: 2DOF主动悬架模型可以为调节型的控制模型提供一些参考,调控系统变量使其趋于更小。 4DOF主动悬架模型mpc算法具有目标值跟踪效果。 同时支持考虑路面的预瞄,提前做出动作(假设路面已知,可去) 两种MPC编程方法均较灵活,只需要修改状态空间方程、权重变量、控制目标、预测区间、控制区间(4DOF)等即可自动编写成对应求解二次规划的矩阵。 资料中有matlab代码,simulink模和介绍资料(自制),包括详细的建模过程以及mpc算法原理和推导过程。
在汽车工程领域,悬架系统的设计一直是一个充满挑战的课题。传统悬架系统主要依靠弹簧、减震器等物理元件来吸收路面冲击,但其响应速度和精度往往难以满足现代汽车对 ride comfort 和 handling performance 的要求。近年来,随着智能控制技术的发展, Model Predictive Control (MPC) 成为了一种备受关注的悬架控制系统设计方法。本文将围绕 MPC 主动悬架模型展开讨论,从理论到实践进行探索。
MPC 控制器的基本原理
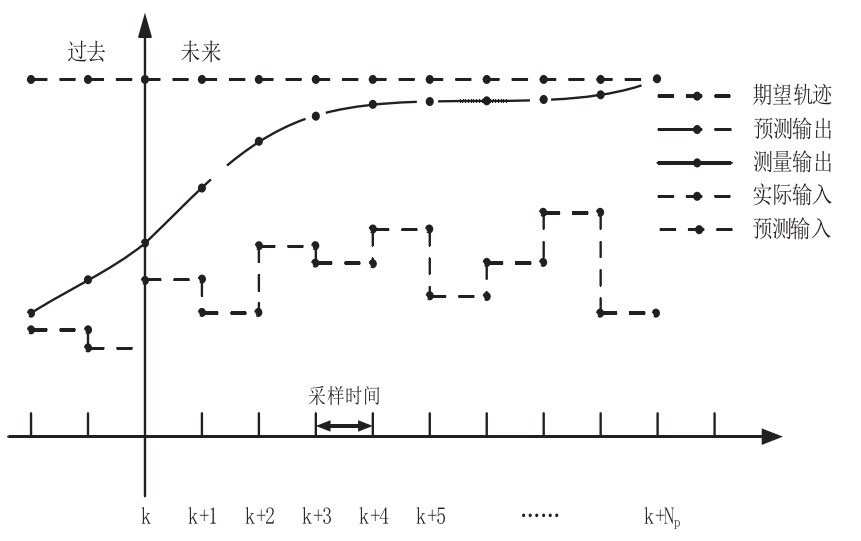
MPC 是一种基于模型的滚动优化控制方法,其核心思想是通过预测系统的未来行为,选择一组控制输入使得系统的输出尽可能接近预期的目标值。具体来说,MPC 的工作流程如下:
- 建模:根据系统的物理特性,建立数学模型,描述系统状态随时间的变化。
- 预测:利用模型预测未来一段时间内系统的状态变化。
- 优化:在预测期内,选择一组控制输入使得系统的输出与目标值之间的偏差最小化。
- 执行:根据优化结果,执行当前最优控制输入,并重复上述步骤。
MPC 的优势在于其灵活性和适应性。通过调整权重矩阵,可以对系统的不同性能指标(如控制精度、能耗等)进行优化平衡。
2自由度(1/4)主动悬架模型
理论基础
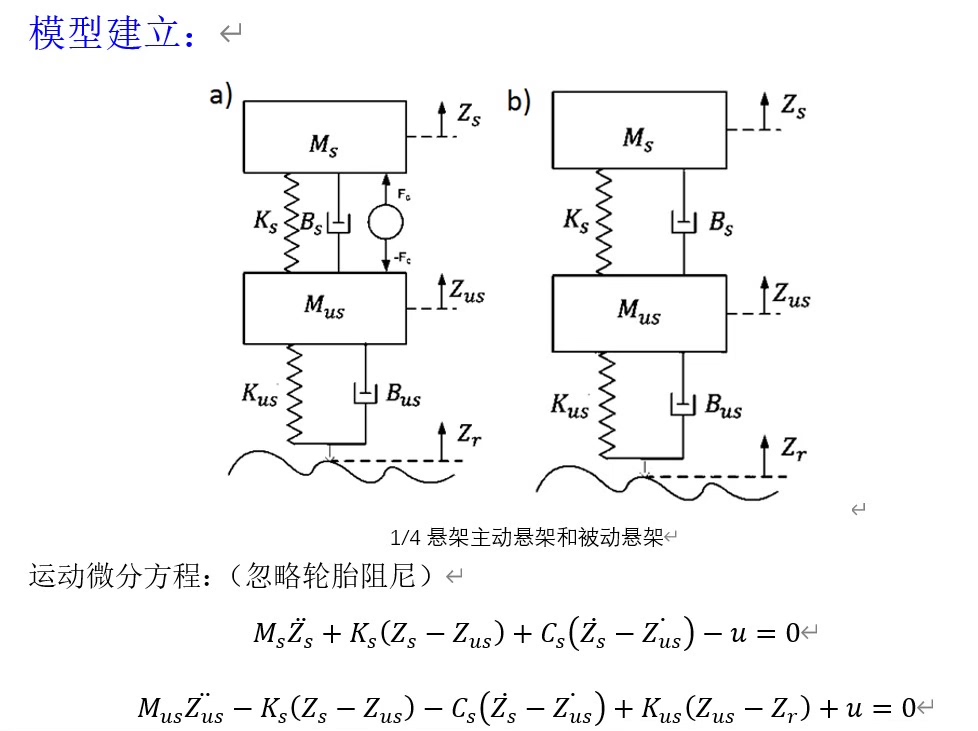
2自由度(1/4)主动悬架模型是最简单的主动悬架系统,通常用于研究悬架的基本控制原理。该模型包含 sprung mass(车身)和 unsprung mass(车轮)两个部分,通过前悬架和后悬架的独立控制来实现对车身运动的调节。
模型预测控制(MPC)主动悬架模型 MPC是一种根据模型预测的方式滚动优化的控制方法,依据自定义权重大小,通过二次规划求解,实现最优的控制效果。 模型预测控制算法在simulink中编写,对比主/被动悬架如簧载质量加速度、悬架动挠度、俯仰角速度等变量以观察MPC控制器控制效果。 模型中有多个路面可供选择-c级路面、减速带等。 matlab代码中包括画图代码,可以将悬架性能指标绘制出来。 2自由度(1/4)主动悬架模型: 4自由度(半车)主动悬架模型: 2DOF主动悬架模型可以为调节型的控制模型提供一些参考,调控系统变量使其趋于更小。 4DOF主动悬架模型mpc算法具有目标值跟踪效果。 同时支持考虑路面的预瞄,提前做出动作(假设路面已知,可去) 两种MPC编程方法均较灵活,只需要修改状态空间方程、权重变量、控制目标、预测区间、控制区间(4DOF)等即可自动编写成对应求解二次规划的矩阵。 资料中有matlab代码,simulink模和介绍资料(自制),包括详细的建模过程以及mpc算法原理和推导过程。
在 MPC 框架下,2自由度模型的控制目标通常是调节 sprung mass 的加速度和 sprung mass 的动挠度。通过调整前悬架和后悬架的力或位移,可以实现对这些性能指标的优化。
MATLAB 实现
以下是一个简单的 2自由度 MPC 控制器的 MATLAB 实现示例:
% 初始化系统参数
m = [100, 100]; % 车身和车轮的质量
k = [1000, 1000]; % 前后悬架的弹簧刚度
c = [10, 10]; % 前后悬架的阻尼系数
% MPC 参数
Ts = 0.1; % 样本时间
N = 10; % 预测步数
horizon = 2; % 滚动优化步数
Q = diag([1, 1, 1, 1]); % 状态权重矩阵
R = 0.1*eye(2); % 控制输入权重矩阵
% 初始化状态
x = [0; 0; 0; 0]; % [车身加速度, 车轮加速度, 身体速度, 车轮速度]
% 仿真循环
for t = 1:100
% 预测阶段
[y, u] = mpc预测(x, u, Ts, N, horizon, Q, R);
% 优化阶段
u_opt = 滚动优化(y, u, Ts, N, horizon, Q, R);
% 执行阶段
x = 执行控制(u_opt, Ts);
% 绘图
绘图(x);
end性能分析
通过上述代码,可以观察到 MPC 控制器对 sprung mass 加速度和动挠度的调节效果。与传统被动悬架相比,MPC 控制器能够更有效地抑制车身振动,提高 ride comfort。
4自由度(1/4)主动悬架模型
理论基础
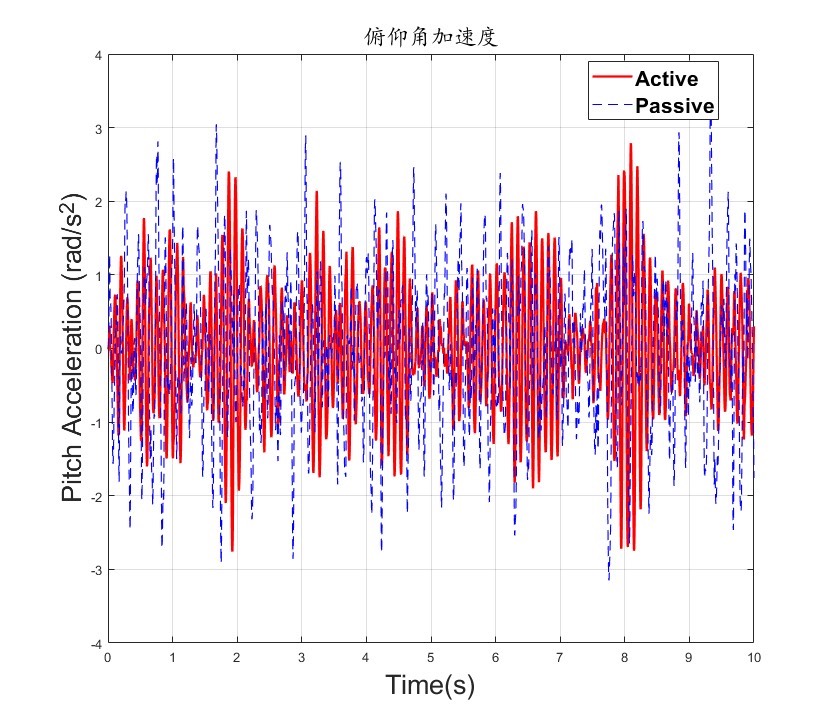
4自由度(1/4)主动悬架模型在 2自由度模型的基础上,增加了前悬架和后悬架的独立性,能够更精确地控制车身姿态和动挠度。在 MPC 框架下,4自由度模型的控制目标通常包括 sprung mass 的加速度、动挠度和俯仰角速度。
MATLAB 实现
以下是一个 4自由度 MPC 控制器的 MATLAB 实现示例:
% 初始化系统参数
m = [100, 100]; % 车身和车轮的质量
k = [1000, 1000]; % 前后悬架的弹簧刚度
c = [10, 10]; % 前后悬架的阻尼系数
I_z = 100; % 车身绕z轴的转动惯量
% MPC 参数
Ts = 0.1; % 样本时间
N = 10; % 预测步数
horizon = 2; % 滚动优化步数
Q = diag([1, 1, 1, 1, 1, 1]); % 状态权重矩阵
R = 0.1*eye(4); % 控制输入权重矩阵
% 初始化状态
x = [0; 0; 0; 0; 0; 0]; % [车身加速度, 车轮加速度, 动挠度, 车轮速度, 身车俯仰角速度]
% 仿真循环
for t = 1:100
% 预测阶段
[y, u] = mpc预测(x, u, Ts, N, horizon, Q, R);
% 优化阶段
u_opt = 滚动优化(y, u, Ts, N, horizon, Q, R);
% 执行阶段
x = 执行控制(u_opt, Ts);
% 绘图
绘图(x);
end性能分析
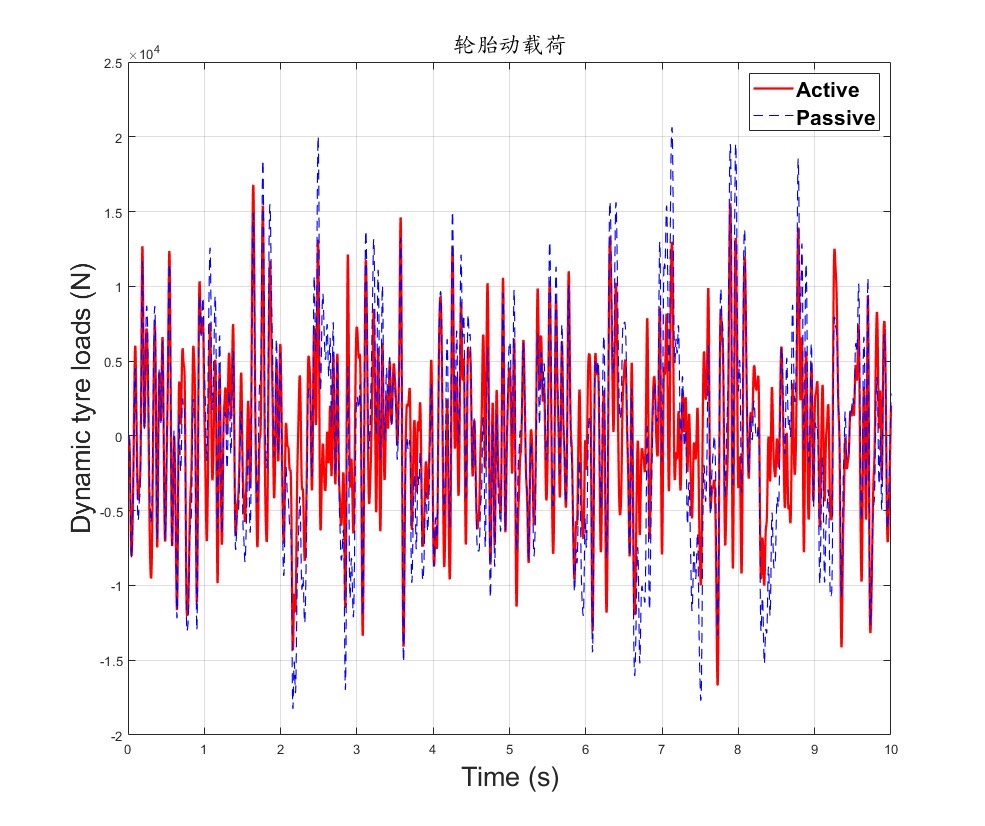
与 2自由度模型相比,4自由度模型在控制精度上有了显著提升。通过调节控制输入(如前悬架和后悬架的力或位移),MPC 控制器能够更精确地控制车身姿态和动挠度,从而提高车辆的动态性能。
MPC 算法的灵活性与适用性
MPC 算法的核心在于其高度的灵活性。通过调整状态空间方程、权重变量、控制目标、预测区间和控制区间,可以为不同的应用需求设计专门的 MPC 控制器。例如:
- 在路面预知的情况下,可以提前调整悬架的控制输入,以应对即将出现的路面变化。
- 在不同的驾驶工况下,可以调整权重矩阵,以优化控制性能。
此外,MPC 算法还具有良好的抗干扰性能,能够在外界 disturbances 的情况下保持较好的控制效果。
总结
通过上述讨论可以看出,MPC 控制器在主动悬架系统中的应用具有显著的优势。无论是 2自由度还是 4自由度的模型,MPC 都能够通过滚动优化的方式,实现对车身加速度、动挠度和俯仰角速度的精确控制。随着计算能力的提升,MPC 算法在汽车悬架系统中的应用前景更加广阔。
未来的研究方向可以集中在以下几个方面:
- 基于深度学习的方法,进一步提高路面预知和控制精度。
- 多约束优化方法,以平衡控制性能和能耗。
- 实时 MPC 算法,降低计算复杂度以适应更高采样的需求。
总之,MPC 算法在主动悬架系统中的应用,为汽车工程领域带来了新的研究思路和设计方案。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐



 0
0 0
0- 0



 已为社区贡献28条内容
已为社区贡献28条内容

所有评论(0)