基于扩展卡尔曼滤波的道路坡度估计算法实战
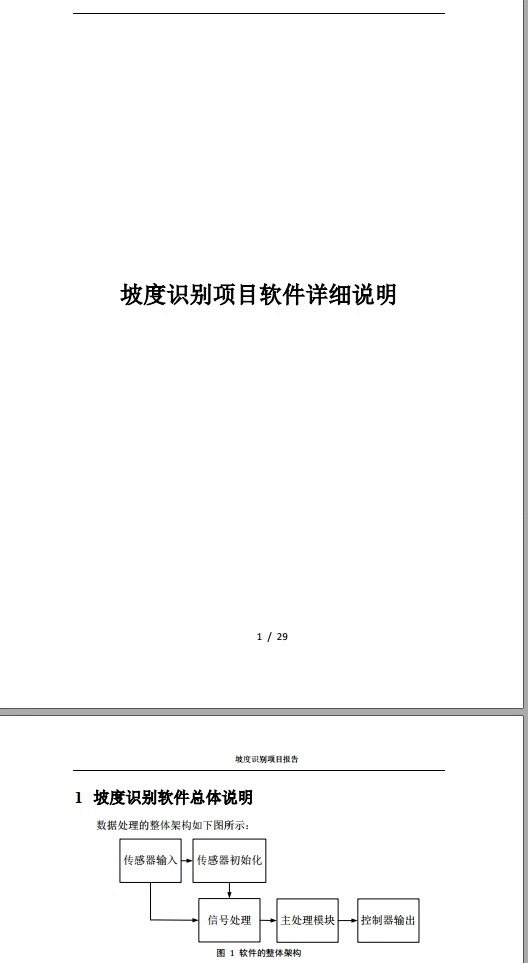
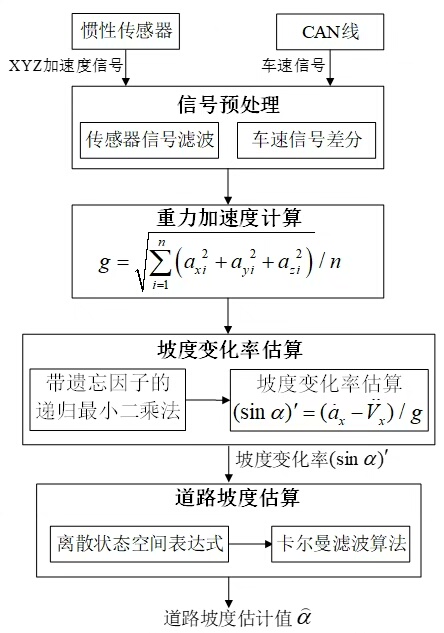
1,扩展卡尔曼滤波。 道路坡度估计算法,使用Simulink模型搭建,已经在实际道路上测试使用。 主要程序执行流程: 1) 获取陀螺仪和加速度采集的实时动态信息 2) 初始化用来校正传感器 3) 通过预处理对信号进行滤波,消除大部分错误和失真的信号 4) 主处理动态调整加权因数、利用角速度校正加速度等方法,得到最优的 坡度估计 5) 通过 CAN 总线将估计的坡度信号传递给整车其他电控单元 该道路坡度估计方法融合传感器和车速信号的和系统,包括以下步骤:一、信号预处理,包括对惯性传感器获得的原始加速度信号的低通滤波和从CAN线获得的车速信号的差分;二、计算重力加速度,利用惯性传感器预处理后的XYZ加速度信号计算当地重力加速度;三、利用带遗忘因子的递归最小二乘法估算道路坡度变化率,滤除大量噪声并且保证算法的实时性;四、利用卡尔曼滤波算法估算道路坡度,将传感器信号和车速信号进行数据融合,提高道路坡度估算的精度。
最近在研究道路坡度估计算法,采用了扩展卡尔曼滤波,并且通过Simulink模型搭建,已经在实际道路上进行了测试使用,今天来和大家分享一下这个有趣的项目。
主要程序执行流程
获取实时动态信息
第一步是获取陀螺仪和加速度采集的实时动态信息,这就像是给算法装上了“眼睛”和“耳朵”,让它能感知周围的变化。在实际代码中,可能会通过特定的接口来读取传感器的数据,例如:
import sensor_interface
gyro_data = sensor_interface.get_gyro_data()
accel_data = sensor_interface.get_accel_data()这里简单假设 sensor_interface 是一个自定义的模块,用于从硬件传感器获取数据。
初始化校正传感器
接下来要初始化用来校正传感器,这一步至关重要,就像给新工具校准一样,能确保后续数据的准确性。代码实现可能如下:
def initialize_sensor_calibration():
# 初始化一些校准参数
gyro_bias = calculate_gyro_bias()
accel_offset = calculate_accel_offset()
return gyro_bias, accel_offsetcalculategyrobias 和 calculateacceloffset 函数会根据传感器的特性和一些校准算法来计算相应的偏差和偏移量。
信号预处理
通过预处理对信号进行滤波,消除大部分错误和失真的信号。低通滤波是常用的方法之一,下面是一个简单的Python实现低通滤波的代码示例:
import numpy as np
import scipy.signal as signal
def low_pass_filter(data, cutoff_freq, sampling_freq):
nyquist_freq = 0.5 * sampling_freq
normal_cutoff = cutoff_freq / nyquist_freq
b, a = signal.butter(5, normal_cutoff, btype='low', analog=False)
y = signal.filtfilt(b, a, data)
return y这里使用了 scipy.signal 库中的 butter 滤波器设计函数和 filtfilt 双向滤波函数,能有效去除高频噪声。
主处理获取最优坡度估计
主处理过程通过动态调整加权因数、利用角速度校正加速度等方法,得到最优的坡度估计。例如,在利用角速度校正加速度时,可能会有如下代码逻辑:
def correct_accel_with_gyro(accel_data, gyro_data):
# 假设这里有一些根据物理模型推导出来的系数
correction_factor = get_correction_factor()
corrected_accel = accel_data + gyro_data * correction_factor
return corrected_accel然后通过一些算法来动态调整加权因数,使得最终的坡度估计更准确。
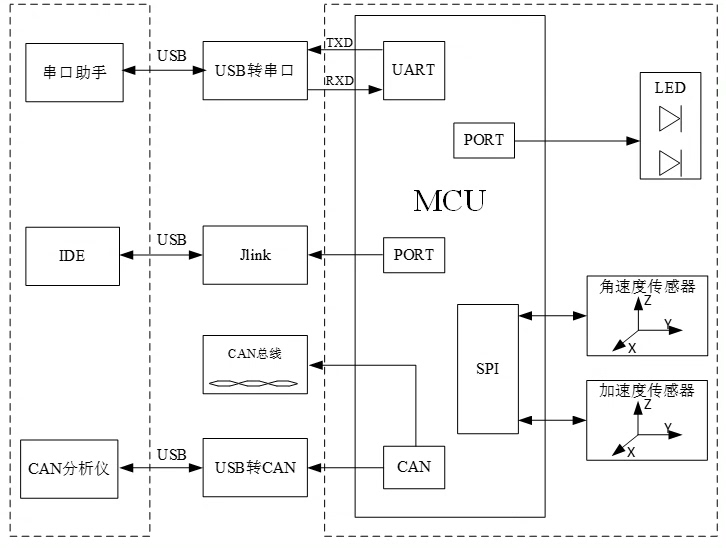
数据传递
通过CAN总线将估计的坡度信号传递给整车其他电控单元。在Python中可以使用一些CAN总线相关的库来实现,例如 python-can 库:
import can
bus = can.interface.Bus(channel='can0', bustype='socketcan')
message = can.Message(arbitration_id=0x123, data=[int(estimated_slope)], is_extended_id=False)
bus.send(message)这里简单构造了一个CAN消息,并通过指定的CAN总线通道发送出去。
融合传感器和车速信号的系统步骤
信号预处理
这一步包括对惯性传感器获得的原始加速度信号的低通滤波和从CAN线获得的车速信号的差分。车速信号差分代码示例:
def differentiate_speed(speed_data):
diff_speed = np.diff(speed_data)
return diff_speednp.diff 函数会计算数组中相邻元素的差值,从而得到车速的变化率。
计算重力加速度
利用惯性传感器预处理后的XYZ加速度信号计算当地重力加速度。假设已经有了预处理后的加速度数据 accelx, accely, accel_z:
def calculate_gravity(accel_x, accel_y, accel_z):
gravity = np.sqrt(accel_x**2 + accel_y**2 + accel_z**2)
return gravity根据勾股定理,将三个方向的加速度合成为重力加速度。
估算道路坡度变化率
利用带遗忘因子的递归最小二乘法估算道路坡度变化率,滤除大量噪声并且保证算法的实时性。这部分代码相对复杂,这里给出一个简化的概念性代码框架:
def recursive_least_squares_with_forget_factor(data, forget_factor):
# 初始化参数
P = np.eye(2)
theta = np.zeros((2, 1))
for i in range(len(data)):
x = np.array([[data[i][0]], [1]])
k = P.dot(x) / (forget_factor + x.T.dot(P).dot(x))
theta = theta + k * (data[i][1] - x.T.dot(theta))
P = (1 / forget_factor) * (P - k.dot(x.T).dot(P))
return theta这里 data 是包含相关变量的数据集,forget_factor 是遗忘因子,通过不断迭代更新参数 theta 来估算坡度变化率。
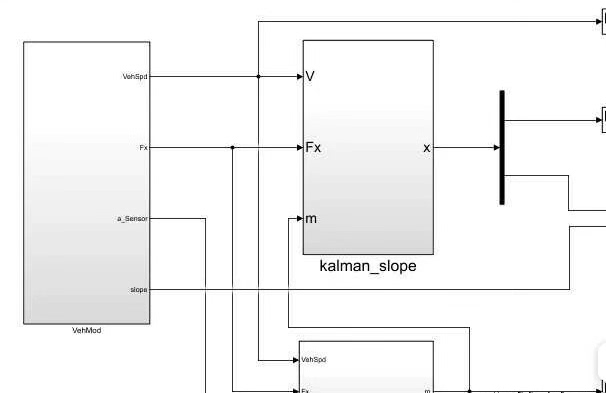
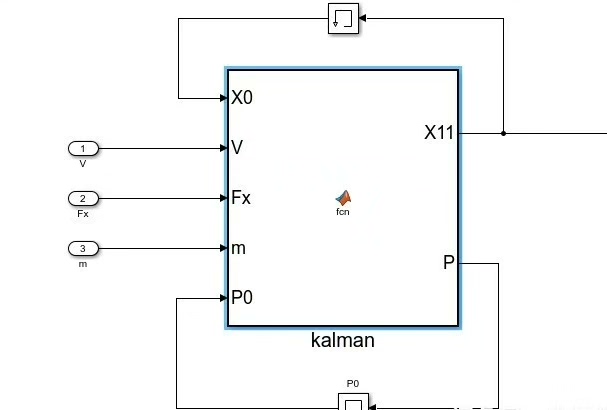
估算道路坡度
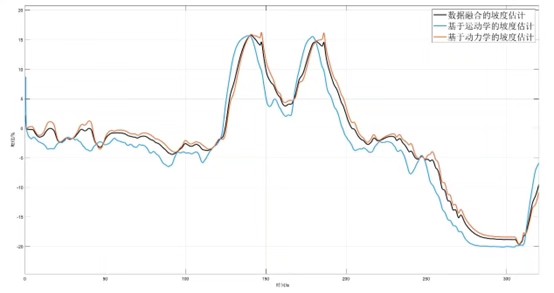
利用卡尔曼滤波算法估算道路坡度,将传感器信号和车速信号进行数据融合,提高道路坡度估算的精度。以一个简单的一维卡尔曼滤波为例:
class KalmanFilter:
def __init__(self, initial_state, process_noise, measurement_noise):
self.state = initial_state
self.process_noise = process_noise
self.measurement_noise = measurement_noise
self.posteriori_error_estimate = 1.0
def predict(self):
self.state = self.state
self.posteriori_error_estimate = self.posteriori_error_estimate + self.process_noise
def update(self, measurement):
kalman_gain = self.posteriori_error_estimate / (self.posteriori_error_estimate + self.measurement_noise)
self.state = self.state + kalman_gain * (measurement - self.state)
self.posteriori_error_estimate = (1 - kalman_gain) * self.posteriori_error_estimate
return self.state实际应用中,会根据传感器信号和车速信号来设置初始状态、过程噪声和测量噪声,通过不断预测和更新来得到更准确的坡度估计值。
1,扩展卡尔曼滤波。 道路坡度估计算法,使用Simulink模型搭建,已经在实际道路上测试使用。 主要程序执行流程: 1) 获取陀螺仪和加速度采集的实时动态信息 2) 初始化用来校正传感器 3) 通过预处理对信号进行滤波,消除大部分错误和失真的信号 4) 主处理动态调整加权因数、利用角速度校正加速度等方法,得到最优的 坡度估计 5) 通过 CAN 总线将估计的坡度信号传递给整车其他电控单元 该道路坡度估计方法融合传感器和车速信号的和系统,包括以下步骤:一、信号预处理,包括对惯性传感器获得的原始加速度信号的低通滤波和从CAN线获得的车速信号的差分;二、计算重力加速度,利用惯性传感器预处理后的XYZ加速度信号计算当地重力加速度;三、利用带遗忘因子的递归最小二乘法估算道路坡度变化率,滤除大量噪声并且保证算法的实时性;四、利用卡尔曼滤波算法估算道路坡度,将传感器信号和车速信号进行数据融合,提高道路坡度估算的精度。
通过以上步骤和方法,基于扩展卡尔曼滤波的道路坡度估计算法在实际应用中取得了不错的效果,为车辆行驶控制等方面提供了重要的数据支持。希望这篇博文能给对相关领域感兴趣的小伙伴一些启发。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐

 10
10 0
0- 0



 已为社区贡献13条内容
已为社区贡献13条内容

所有评论(0)