【MATLAB例程】三维空间的RRT(快速随机树),无人机路径规划、避障,可自定义起终点坐标、障碍物大小与位置。附完整代码的下载链接
·
MATLAB代码,三维空间上的RRT(快速扩展随机树)路径规划仿真工具,专门用于模拟无人机在复杂三维空间中的避障导航。利用目标偏向采样算法,在障碍物环境中快速生长出一条从起点到终点的可行航迹,并支持搜索过程的实时动态可视化。
原创代码,可直接运行
程序简介
代码为经典的 3D RRT(快速扩展随机树)算法,专门用于无人机在复杂三维空间中的路径规划与避障。
RRT (Rapidly-exploring Random Tree) 是一种基于采样的路径规划算法。它通过在搜索空间内随机采样,像树木生长一样快速扩展节点,从而在充满障碍物的空间中寻找一条可行路径。
核心功能:
- 三维空间建模:不同于平面规划,该算法在 X , Y , Z X, Y, Z X,Y,Z 三个维度上进行采样和碰撞检测,完美契合无人机的飞行环境。
- 目标偏向采样 (Goal Bias):通过
goalProb参数,算法会以一定概率直接向终点方向扩展,极大地提高了搜索效率,避免了盲目搜索。 - 实时动态显示:程序在运行过程中会实时绘制树的生长过程(蓝色细线),用户可以直观看到算法是如何“绕过”障碍物的。
- 多维性能分析:规划完成后,程序会自动生成路径长度、节点增长趋势以及 X / Y / Z X/Y/Z X/Y/Z 坐标变化曲线,方便进行算法评估。
运行结果
直接运行,可得以下结果。
规划的路线图(3D):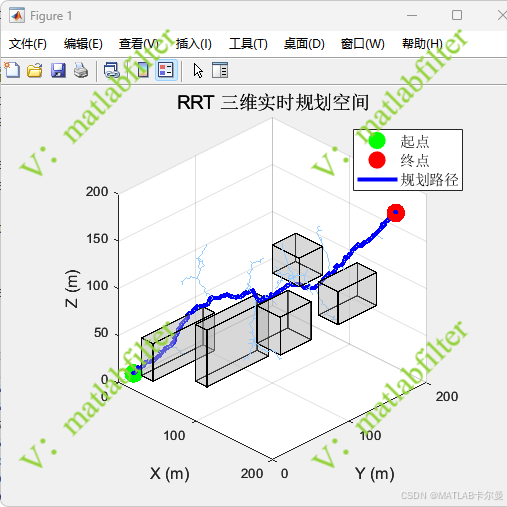
路径的XYZ三轴坐标: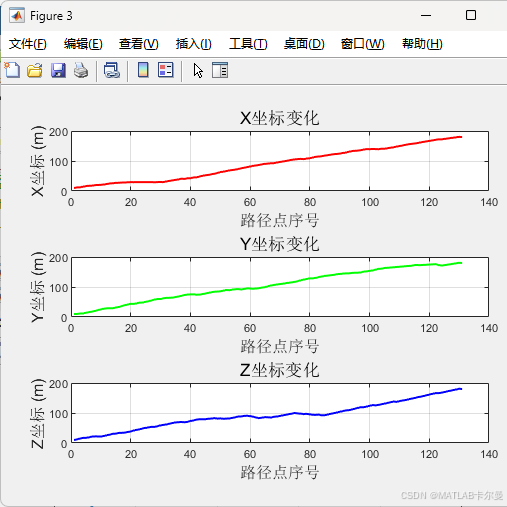
命令行窗口显示规划结果: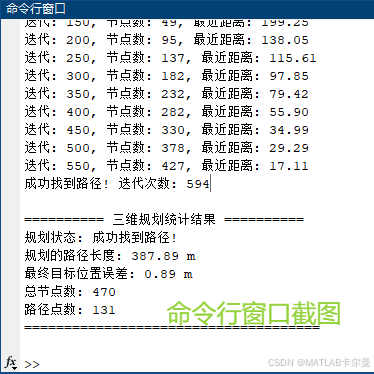
部分程序截图如下,可自由更改地图大小、起终点坐标、障碍物等:
MATLAB源代码
部分代码如下:
%% RRT路径规划,用于三维空间上的无人机路径规划与避障,含性能分析与可视化
% 作者:matlabfilter
% 2026-03-10/Ver1
clear; clc; close all;
rng(0);
%% 参数设置
mapLimit = [0 200 0 200 0 200]; % 地图大小 [xmin xmax ymin ymax zmin zmax]
startPos = [10, 10, 10]; % 起点坐标(x,y,z)
goalPos = [180, 180, 180]; % 终点(目标)的坐标(x,y,z)
stepSize = 3; % 步长
goalThreshold = 2; % 到达目标的阈值
maxIter = 15000; % 最大迭代次数
goalProb = 0.1; % 采样点偏向目标的概率
% 障碍物设置 [x, y, z, width, height, depth]
obstacles = [
30, 0, 20, 15, 80, 40;
60, 40, 10, 15, 80, 60;
100, 80, 50, 30, 40, 40;
140, 120, 80, 25, 50, 35;
80, 120, 100, 35, 30, 30];
%% 数据记录变量
tree.pos = startPos;
tree.parent = 0;
distToGoalIter = []; % 每步到目标的距离
nodeCountIter = []; % 节点增长情况
%% 【图形布局】三维可视化
figure;
hold on
title('RRT 三维实时规划空间', 'FontSize', 14);
axis equal
xlim(mapLimit(1:2))
ylim(mapLimit(3:4))
zlim(mapLimit(5:6))
grid on
xlabel('X (m)', 'FontSize', 12);
ylabel('Y (m)', 'FontSize', 12);
zlabel('Z (m)', 'FontSize', 12);
view(45, 30); % 设置三维视角
% 绘制障碍物
for i = 1:size(obstacles, 1)
drawBox(obstacles(i,:), [0.7 0.7 0.7], 0.3);
end
% 绘制起点和终点
完整代码:https://download.csdn.net/download/callmeup/92731399
或:如需帮助,或有导航、定位滤波相关的代码定制需求,请点击下方卡片联系作者

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐


 12
12 0
0- 0



 已为社区贡献22条内容
已为社区贡献22条内容

所有评论(0)