手搓无感FOC仿真:从电流闭环到角度渐变切换的暴力美学
定位+电流闭环强拖+ 角度渐变切换+ 速度电流双闭环+ 无传感器角度估算SMO+ PLL 控制方式 Simulink 仿真模型 (Matlab2020b版本)以及教授模型搭建 这是一种常用的无传感FOC电机控制算法,掌握这种算法的基本原理,并有仿真模型在手,就可以用它来指导实践中的程序调试,做到实际项目不盲目调试 模型特点: 1. 所有模块都做到了模块化,各个模块分区清楚,结构清晰 2. 所有电机和控制参数均在m文件中体现,变量注释清楚,随用随改 3. 速度环和电流环PI参数均实现自动整定 模型采用标幺值系统 5. 各状态切换使用stateflow,模型结构清晰 6.通用表贴和内嵌式电机
搞电机控制的兄弟都懂,无传感器FOC这玩意儿就像骑独轮车——既要盯着电流闭环别翻车,还得摸着黑估算转子角度。今天咱们拆解一个Simulink仿真模型,看它怎么用SMO+PLL玩转无感控制。模型文件在Matlab2020b里跑得飞起,参数全甩在m文件里,改起来比换裤衩还方便。
电流闭环强拖开局,直接上硬菜:
% 电流环PI参数自动整定(标幺值真香)
Kp_Id = (2*pi*Fsw)*Ls_nom;
Ki_Id = (R_nom/Ls_nom)*Ts;这段代码把开关频率、电感电阻参数揉碎了喂给PI控制器。标幺值系统让参数调整像调鸡尾酒——基值电压电流定好,参数比例关系一目了然。实测内嵌式电机切到表贴电机时,改个Ld/Lq比值就能直接起飞。
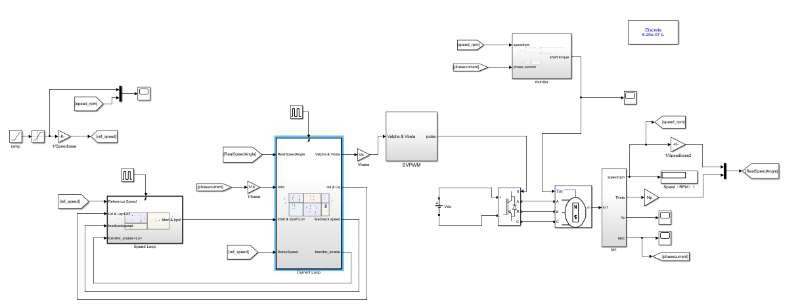
速度环和电流环的双闭环结构,Simulink里长这样:
Speed_PI --> Current_PI --> SVPWM
↑ ↑
| |
速度观测 滑模观测器滑模观测器(SMO)的骚操作藏在Function Block里:
// 滑模切换函数
float sign_func(float e){
return (e > 0) ? 1 : ((e < 0) ? -1 : 0);
}这玩意儿处理反电动势就像砂纸打磨金属,噪声再大也能磨出光滑角度信号。配合后面的PLL锁相环,角度估算抖得像帕金森的手突然稳如老狗。
定位+电流闭环强拖+ 角度渐变切换+ 速度电流双闭环+ 无传感器角度估算SMO+ PLL 控制方式 Simulink 仿真模型 (Matlab2020b版本)以及教授模型搭建 这是一种常用的无传感FOC电机控制算法,掌握这种算法的基本原理,并有仿真模型在手,就可以用它来指导实践中的程序调试,做到实际项目不盲目调试 模型特点: 1. 所有模块都做到了模块化,各个模块分区清楚,结构清晰 2. 所有电机和控制参数均在m文件中体现,变量注释清楚,随用随改 3. 速度环和电流环PI参数均实现自动整定 模型采用标幺值系统 5. 各状态切换使用stateflow,模型结构清晰 6.通用表贴和内嵌式电机
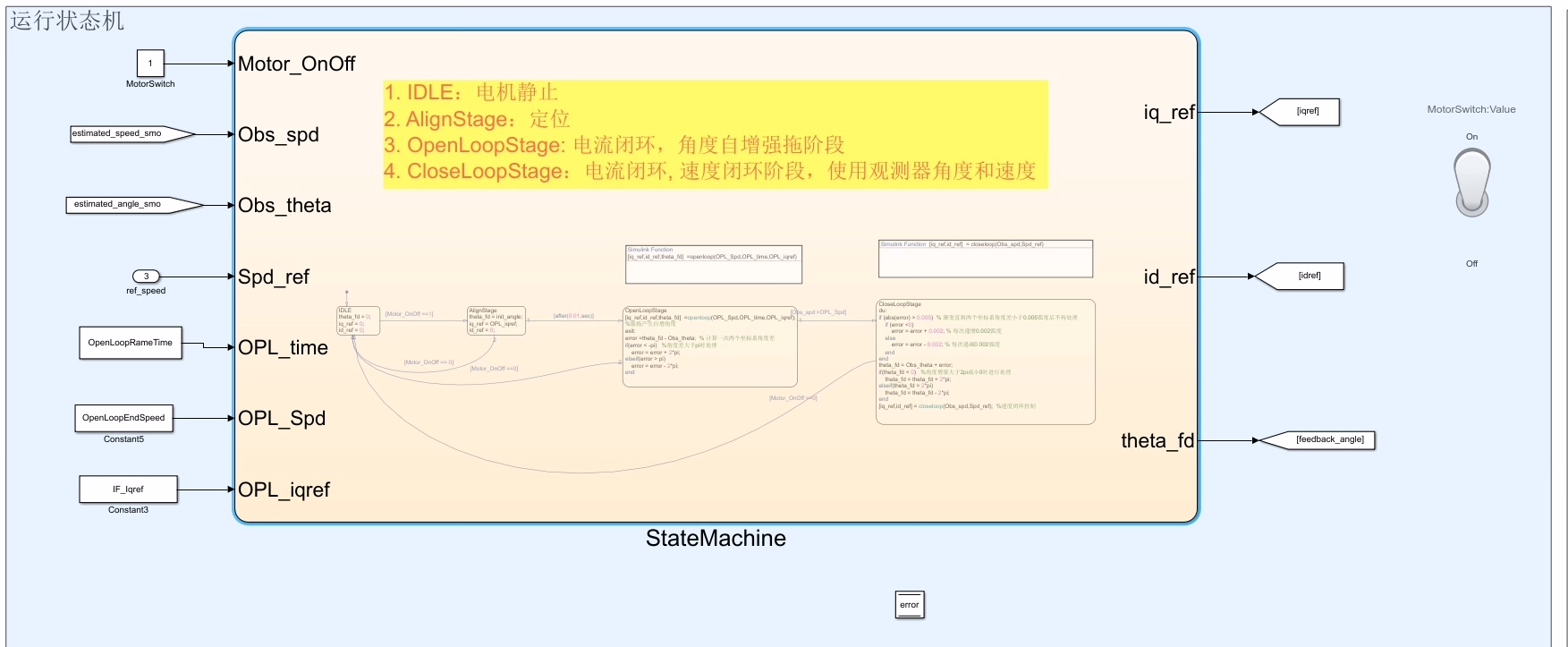
Stateflow状态机才是灵魂画手,五个状态切换行云流水:
- 强拖启动:电流闭环硬怼
- 角度渐变:像踩离合换挡
- 速度闭环:油门焊死
- 故障保护:见势不妙就断电
- 自由停车:优雅谢幕
切换逻辑用图形化编程画出来,比看代码舒坦十倍。特别是角度渐变环节,0.5秒内把强拖角度平滑过渡到估算角度,实测波形像德芙巧克力一样纵享丝滑。
模型里藏着个彩蛋——标幺值转换层。所有物理量进算法前先过一遍:
V_base = Vdc/sqrt(3);
I_base = 2*T_rated/(3*Pole*Flux);这招让表贴式电机和内嵌式电机参数能混着用,改电机类型就像换皮肤,算法内核纹丝不动。实测从IPM切到SPM,改个m文件参数就能直接跑,省下的时间够撸两顿烧烤。
最后说PI参数自动整定,这玩意儿简直新手福音:
[Gm,Pm] = margin(open_loop);
Kp = 0.8/(2*Gm);
Ki = Kp*(2*pi*Fc);拿开环传函的相位裕度当尺子,自动算出靠谱的PI参数。实测阶跃响应超调量能控在5%以内,比手动调参快三倍。不过老司机还是喜欢手动微调,毕竟算法给的参数就像自动挡,手动挡才有驾驶乐趣。
这个模型最大的价值不是跑通仿真,而是拿着它去怼真实电机时,能精确锁定问题层——到底是观测器抽风还是PI参数拉胯,波形对比一目了然。上周拿它调了个吸尘器电机,从仿真到实机运行只花了2天,甲方爸爸以为我开了外挂。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐



 4
4 0
0- 0



 已为社区贡献7条内容
已为社区贡献7条内容

所有评论(0)