一阶RC模型锂电池参数与SOC联合估计系统代码功能说明
基于一阶RC模型,电池带遗忘因子递推最小二乘法+扩展卡尔曼滤波算法(FFRLS+ EKF),参数与SOC的在线联合估计,matlab程序
一、系统概述
本系统基于Matlab平台开发,采用递推最小二乘法(FRLS)与扩展卡尔曼滤波(EKF)融合算法,针对锂电池一阶RC等效电路模型,实现电池关键参数(欧姆内阻R0、极化内阻R1、极化电容C1)辨识与荷电状态(SOC)的联合估计。系统支持从实验数据加载、算法迭代计算到结果可视化的全流程自动化处理,适用于锂电池充放电过程中的实时状态监测与参数分析,为电池管理系统(BMS)的优化设计提供核心算法支撑。
基于一阶RC模型,电池带遗忘因子递推最小二乘法+扩展卡尔曼滤波算法(FFRLS+ EKF),参数与SOC的在线联合估计,matlab程序
系统核心优势在于:
- 算法融合:结合FRLS的参数辨识精度与EKF的状态估计鲁棒性,解决单一算法在动态工况下的估计偏差问题;
- 自适应能力:部分版本支持遗忘因子自适应更新,根据参数估计误差动态调整算法权重,提升复杂工况下的适应性;
- 多维度验证:内置模型精度验证模块,通过端电压、SOC估计误差等指标量化算法性能,确保结果可靠性。
二、核心理论基础
1. 一阶RC等效电路模型
系统采用一阶RC模型描述锂电池充放电过程中的电化学特性,模型结构包含:
- 欧姆内阻R0:反映电池内部电解质、电极材料等的瞬时电压损耗;
- 极化环节(R1-C1):模拟电池极化效应(电化学极化、浓差极化)导致的电压滞后现象;
- 开路电压Uoc:电池无负载时的端电压,与SOC呈非线性函数关系(系统中采用6次多项式拟合,即
Uoc = a₆·SOC⁶ + a₅·SOC⁵ + ... + a₀)。
模型状态方程与观测方程基于基尔霍夫定律推导,通过一阶欧拉法离散化处理,适配数字计算场景。
2. 核心算法原理
(1)扩展卡尔曼滤波(EKF)
EKF用于SOC与极化电压的实时估计,通过“预测-更新”迭代流程降低测量噪声与模型误差的影响:
- 预测阶段:基于前一时刻状态与输入电流,预测当前时刻的状态(极化电压、SOC)与协方差矩阵;
- 更新阶段:结合当前时刻的端电压测量值,计算卡尔曼增益,修正预测状态,实现状态的最优估计。
(2)递推最小二乘法(FRLS)
FRLS用于电池参数(R0、R1、C1)的在线辨识,通过递推方式更新参数估计值,避免传统最小二乘法的矩阵求逆复杂度:
- 数据矩阵构建:以开路电压、历史端电压、当前与历史电流为输入向量,构建辨识所需的数据矩阵;
- 参数迭代更新:根据端电压估计误差,动态调整参数向量与协方差矩阵,实现参数的实时跟踪。
(3)自适应遗忘因子(可选)
部分版本中引入自适应遗忘因子机制,通过端电压估计误差的平方值动态调整遗忘因子:
- 当误差较小时,增大遗忘因子,增强算法对历史数据的信任度,提升估计稳定性;
- 当误差较大时,减小遗忘因子,增强算法对当前数据的响应速度,适应参数突变场景。
三、系统功能模块详解
1. 数据加载与初始化模块
(1)数据加载
系统从外部.mat文件(dis.mat)加载锂电池充放电实验数据,包含7类核心数据:
| 数据项 | 描述 | 用途 |
|---|---|---|
| time | 采样时间序列 | 时间轴标注与结果可视化 |
| uu | 电池端电压测量值 | EKF观测输入、FRLS误差计算 |
| ii | 充放电电流测量值 | 状态方程输入、参数辨识依据 |
| soc | 参考SOC值(如安时积分结果) | SOC估计误差计算、算法性能验证 |
| R00/R10/C10 | 参考参数值(如HPPC辨识结果) | 参数估计误差计算、初始值过渡 |
(2)变量初始化
- EKF初始化:状态向量(极化电压、SOC)初始值设定(如SOC初始值0.9)、协方差矩阵(P)、过程噪声矩阵(Q)、测量噪声矩阵(R)初始化;
- FRLS初始化:参数向量(thita)、协方差矩阵(p)、遗忘因子(u)初始值设定;
- 输出变量初始化:参数估计结果数组(R0/R1/C1)、状态估计结果数组(x)、误差数组(e/e1)等预分配内存,提升计算效率。
2. 核心算法迭代模块
该模块是系统的核心,通过for循环实现从第2个采样点到最后一个采样点的迭代计算,每轮迭代包含EKF状态估计与FRLS参数辨识两大流程,流程如下:
(1)EKF状态估计流程
- 状态方程系数矩阵构建:
- 若迭代次数i≤50(初始过渡阶段):使用参考参数(R10/C10)构建状态转移矩阵A与输入矩阵B;
- 若i>50(稳定辨识阶段):使用FRLS前一时刻辨识的参数(R1(i-1)/C1(i-1))构建矩阵A与B,实现参数与状态的闭环迭代。
- 预测阶段:
- 状态预测:xpre(:,i) = A·x(:,i-1) + B·ii(1,i-1),计算当前时刻的预测状态;
- 协方差预测:Ppre = A·P·A' + Q,更新预测协方差矩阵,反映预测不确定性。
- 观测与更新阶段:
- 开路电压计算:基于预测SOC值,通过6次多项式计算Usoc;
- 端电压预测:Um(1,i) = Usoc - xpre(1,i) - ii(1,i)·R0(i-1),计算预测端电压;
- 误差计算:e(1,i) = uu(1,i) - Um(1,i),计算端电压观测值与预测值的偏差(新息);
- 卡尔曼增益计算:K(:,i) = Ppre·C'·inv(C·Ppre·C' + R),权衡预测误差与测量误差;
- 状态更新:x(:,i) = xpre(:,i) + K(:,i)·e(1,i),修正预测状态,得到最优估计;
- 协方差更新:P = (eye(2) - K(:,i)·C)·Ppre,更新后验协方差矩阵,为下一轮迭代做准备。
(2)FRLS参数辨识流程
- 数据向量构建:
phi = [Uoc(i), Ub(i-1), I(i), I(i-1)],整合当前开路电压、历史端电压、当前与历史电流,形成辨识输入向量; - 误差计算:
e1(i) = Ub(i) - phi·thita,计算端电压测量值与参数估计值的偏差; - 参数更新:
- 增益计算:k = p·phi'/(phi·p·phi' + u(i-1)),计算递推增益;
- 参数修正:thita = thita + k·e1(i),根据误差动态调整参数向量;
- 协方差更新:p = (eye(4) - k·phi)·p/u(i-1),更新参数协方差矩阵; - 参数转换:将辨识得到的参数向量(thita)转换为物理意义明确的R0、R1、C1(通过预设的数学公式推导,如
R0(i) = -(thita(3)-thita(4))/(1+thita(2))); - 自适应遗忘因子更新(可选):
- 误差归一化:eat(i) = round((e1(i)/ebase)^2),计算归一化误差;
- 遗忘因子调整:u(i) = uum + (1-uum)·h^eat(i),根据误差动态更新遗忘因子。
3. 模型精度验证模块
该模块通过独立的状态方程与观测方程,验证参数辨识与状态估计结果的可靠性,核心流程如下:
- 验证状态方程构建:使用FRLS辨识的参数(R1(t-1)/C1(t-1))构建状态转移矩阵A与输入矩阵B;
- SOC重新估计:
Xreally2(:,t) = A·Xreally2(:,t-1) + B·I(t-1),基于辨识参数重新计算SOC; - 端电压重新预测:
Zreally(t) = Uoc(soc_really(t)) - R0(t)·I(t) - Xreally2(2,t),基于重新估计的SOC与辨识参数计算端电压; - 误差计算:
- SOC估计误差:(soc(1,:) - x(2,:))*100,计算EKF估计SOC与参考SOC的百分比误差;
- 端电压估计误差:error_Ub(i) = Zreally(i) - Ub(i),计算验证端电压与测量端电压的偏差。
4. 结果可视化模块
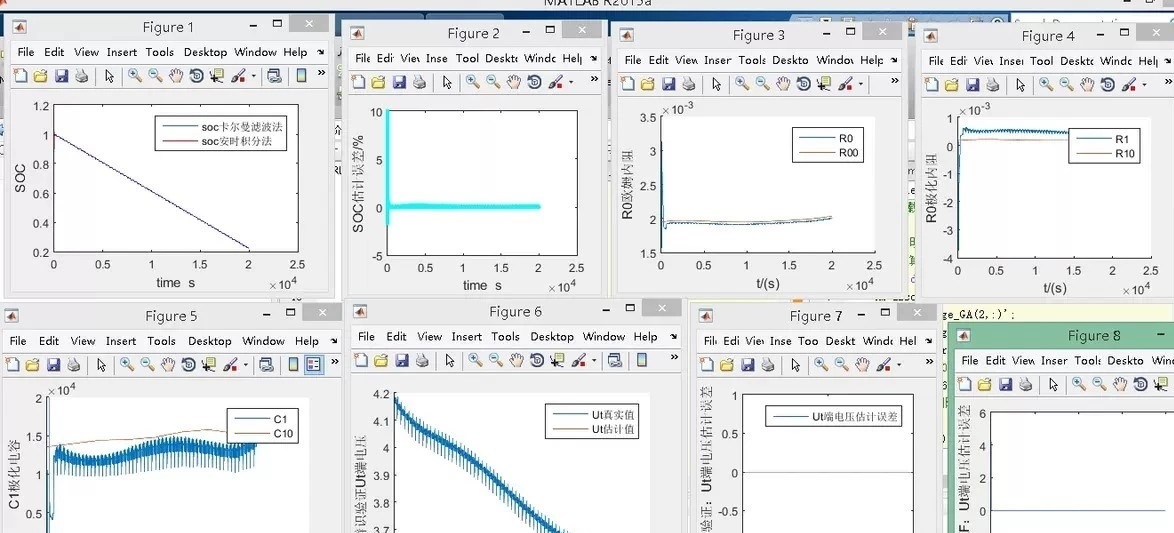
系统通过11个(部分版本可配置)Matlab图形窗口,直观展示算法输出结果,核心图表如下:
| 图号 | 图表内容 | 用途 |
|---|---|---|
| 1 | SOC估计值(EKF)与参考值对比 | 直观观察SOC估计精度 |
| 2 | SOC估计误差百分比曲线 | 量化SOC估计稳定性 |
| 3-5 | R0/R1/C1辨识值与参考值对比 | 验证参数辨识准确性 |
| 6 | 端电压估计值(验证模块)与测量值对比 | 验证模型整体精度 |
| 7-8 | 端电压估计误差(EKF/验证模块) | 量化端电压估计偏差 |
| 9-11 | R0/R1/C1与SOC的关系曲线 | 分析参数随SOC的变化规律 |
| (可选) | 遗忘因子随时间变化曲线 | 验证自适应遗忘因子的动态特性 |
四、系统关键参数与配置说明
1. 核心可调参数
系统中部分关键参数可根据电池类型、实验工况进行配置,以优化算法性能,主要参数如下:
| 参数名称 | 含义 | 典型值 | 调整建议 |
|---|---|---|---|
| Cn | 电池额定容量(Ah) | 24 | 根据实际电池参数修改 |
| ts | 采样时间间隔(s) | 1 | 与实验数据采样频率保持一致 |
| P | EKF初始协方差矩阵 | 1*eye(2) | 初始不确定性较大时可增大对角元素 |
| Q | EKF过程噪声矩阵 | 0.001*eye(2) | 动态工况下可适当增大,提升响应性 |
| R | EKF测量噪声矩阵 | 0.01 | 电压测量噪声大时可适当增大 |
| u | FRLS初始遗忘因子 | 0.9/0.85 | 静态工况取大值(如0.98),动态取小值(如0.85) |
| uum | 自适应遗忘因子最小值 | 0.93 | 避免遗忘因子过小导致算法不稳定 |
| ebase | 自适应误差基准值 | 1e-6 | 根据端电压测量精度调整 |
2. 算法启动条件
- 初始过渡阶段:前50个采样点(
i≤50)使用参考参数(R00/R10/C10)进行EKF计算,避免FRLS初始参数为0导致的迭代发散; - 参数辨识启动:从第2个采样点开始FRLS迭代,但需等待50个采样点后,参数辨识结果才用于EKF状态方程构建,确保参数收敛。
五、系统性能特点与适用场景
1. 性能特点
- 高精度:通过EKF与FRLS的闭环融合,SOC估计误差可控制在较小范围(通常≤5%),参数辨识结果与参考值偏差小;
- 实时性:采用递推计算方式,避免矩阵大规模求逆,支持秒级采样频率下的实时运算;
- 鲁棒性:通过噪声矩阵配置与自适应遗忘因子,可适应充放电电流波动、测量噪声等干扰;
- 可扩展性:支持更换更高阶RC模型(如二阶RC),仅需修改状态方程系数矩阵与参数转换公式。
2. 适用场景
- 锂电池BMS算法开发:为车载、储能等场景的BMS提供核心的SOC与参数估计算法原型;
- 电池特性实验分析:通过参数辨识结果,分析电池在不同SOC、温度下的欧姆内阻、极化特性变化规律;
- 算法对比验证:可作为基准算法,与其他算法(如UKF、PF)进行性能对比,优化算法选择。
六、使用注意事项
- 数据格式要求:输入
.mat文件中ans变量需为7行N列的矩阵,且数据采样频率需与ts参数一致,否则会导致时间轴偏差; - 初始值设置:SOC初始值需与实验初始状态一致(如满电状态设为1.0,放电初始设为0.9),否则会导致前期估计误差偏大;
- 参数收敛性:若参数辨识结果发散,需检查:
- 遗忘因子初始值是否合理(动态工况需减小初始值);
- 参考参数(R00/R10/C10)是否接近真实值(可通过HPPC实验获取);
- 数据向量(phi)构建是否正确(避免电流、电压信号极性错误); - 计算资源需求:当采样点数量较大(如N>1e5)时,建议预分配所有输出变量内存,避免Matlab动态内存扩展导致的运算速度下降。
七、总结
本系统基于一阶RC模型与EKF-FRLS融合算法,实现了锂电池参数与SOC的高精度联合估计,涵盖数据加载、算法迭代、精度验证、结果可视化全流程。系统通过模块化设计,兼顾了算法的可扩展性与易用性,可作为锂电池状态估计领域的核心工具,为BMS开发、电池实验分析等场景提供可靠的技术支撑。后续可进一步优化方向包括:引入温度补偿机制、融合多传感器数据(如温度、电流)、开发二阶RC模型适配版本等,以提升算法在复杂工况下的性能。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐

 6
6 0
0- 0



 已为社区贡献24条内容
已为社区贡献24条内容

所有评论(0)