永磁同步电机转速电流双闭环PI + MTPA + 弱磁控制Simulink仿真模型探索
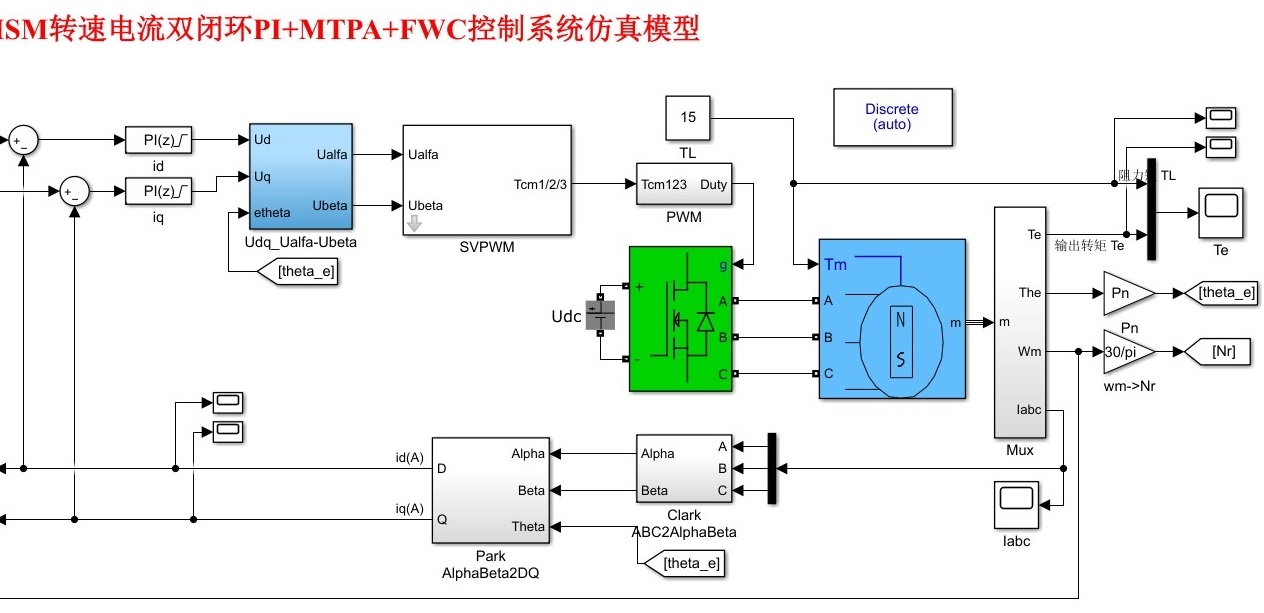
永磁同步电机转速电流双闭环PI+MTPA+弱磁控制Simulink仿真模型 1.永磁同步电机SVPWM控制算法,实现FOC矢量控制~ 2.转速电流双闭环控制,电流环采用PI控制,转速环分别采用转矩PI控制,交直轴电流在控制过程中根据负载和转速变化在MTPA和弱磁控制模式来回切换~
在电机控制领域,永磁同步电机(PMSM)以其高效、高功率密度等优点得到了广泛应用。今天咱就来聊聊这个永磁同步电机转速电流双闭环PI + MTPA + 弱磁控制的Simulink仿真模型,深入探究下其中关键控制算法的实现。
SVPWM控制算法与FOC矢量控制
SVPWM(空间矢量脉宽调制)控制算法是实现FOC(磁场定向控制)矢量控制的关键环节。FOC矢量控制的核心思想,是将定子电流分解为产生磁场的励磁电流分量和产生转矩的转矩电流分量,从而实现对电机磁场和转矩的独立控制,就像给电机的两个关键“属性”分别安上了精准的调控开关。
SVPWM算法呢,通过控制逆变器的开关状态,合成期望的空间电压矢量,让电机按照我们的预期转动。下面简单看段代码示意(以MATLAB为例,假设已有逆变器模型参数等基础设定):
% 定义一些基本参数
Ts = 0.0001; % 采样时间
N = 1/Ts; % 采样点数
% 这里假设已经有三相电压的幅值和相位信息
Va = 100*sin(2*pi*50*t);
Vb = 100*sin(2*pi*50*t - 2*pi/3);
Vc = 100*sin(2*pi*50*t + 2*pi/3);
% SVPWM调制核心代码简化示意
function [Ta, Tb, Tc] = svpwm(Va, Vb, Vc)
% 克拉克变换
Valpha = Va;
Vbeta = (Va + 2*Vb*cos(pi/3))/sqrt(3);
% 计算扇区
sector = findSector(Valpha, Vbeta);
% 计算作用时间
[Ta, Tb, Tc] = calculateTime(Valpha, Vbeta, sector);
% 处理过调制情况
[Ta, Tb, Tc] = overModulation(Ta, Tb, Tc);
end这段代码里,先对三相电压进行克拉克变换,得到α - β坐标系下的电压分量,然后通过函数计算扇区以及各个矢量的作用时间,还考虑了过调制情况。实际中,这只是简化示意,完整实现还需更多细节处理,但大致思路就是这样,根据三相电压去调制出合适的PWM波来驱动逆变器。
转速电流双闭环控制
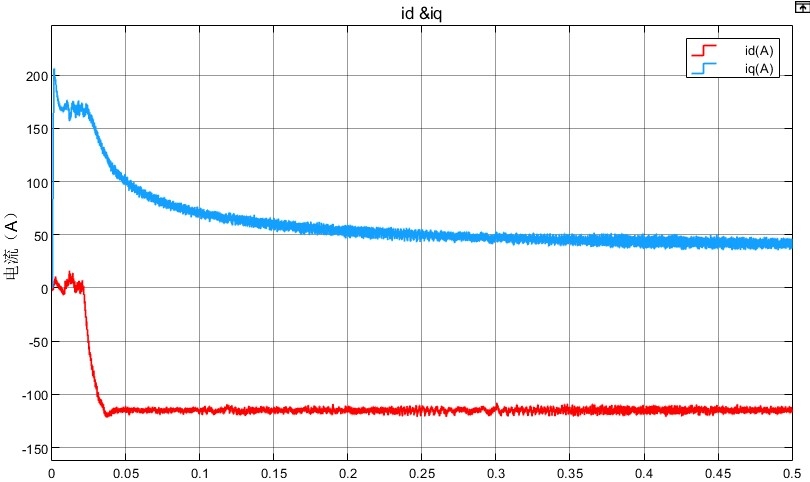
转速电流双闭环控制就像给电机套上了两层“智能护甲”,能让电机更稳定、高效地运行。电流环采用PI控制,转速环采用转矩PI控制。
电流环PI控制
电流环主要负责快速跟踪给定电流信号,抑制电流的波动。PI控制器的公式大家都熟悉:$u(t)=Kp e(t)+Ki \int{0}^{t} e(\tau)d\tau$,其中$Kp$是比例系数,$K_i$是积分系数,$e(t)$是误差信号。
永磁同步电机转速电流双闭环PI+MTPA+弱磁控制Simulink仿真模型 1.永磁同步电机SVPWM控制算法,实现FOC矢量控制~ 2.转速电流双闭环控制,电流环采用PI控制,转速环分别采用转矩PI控制,交直轴电流在控制过程中根据负载和转速变化在MTPA和弱磁控制模式来回切换~
代码实现(假设使用C语言):
// 定义PI控制器参数
float Kp = 0.5;
float Ki = 0.1;
float integral = 0;
float previous_error = 0;
// PI控制函数
float current_PI_control(float setpoint, float actual_value) {
float error = setpoint - actual_value;
integral += error;
float output = Kp * error + Ki * integral;
previous_error = error;
return output;
}这里通过设定的$K_p$和$Ki$,根据给定电流和实际电流的误差,不断调整输出,让实际电流快速跟踪给定电流。
转速环转矩PI控制
转速环则是根据转速误差,通过转矩PI控制来调节电流环的给定值。当电机负载变化或者转速设定改变时,转速环就开始发挥作用。同样是PI控制的原理,只是这里的误差是转速误差,输出用来调节转矩,进而影响电流给定。
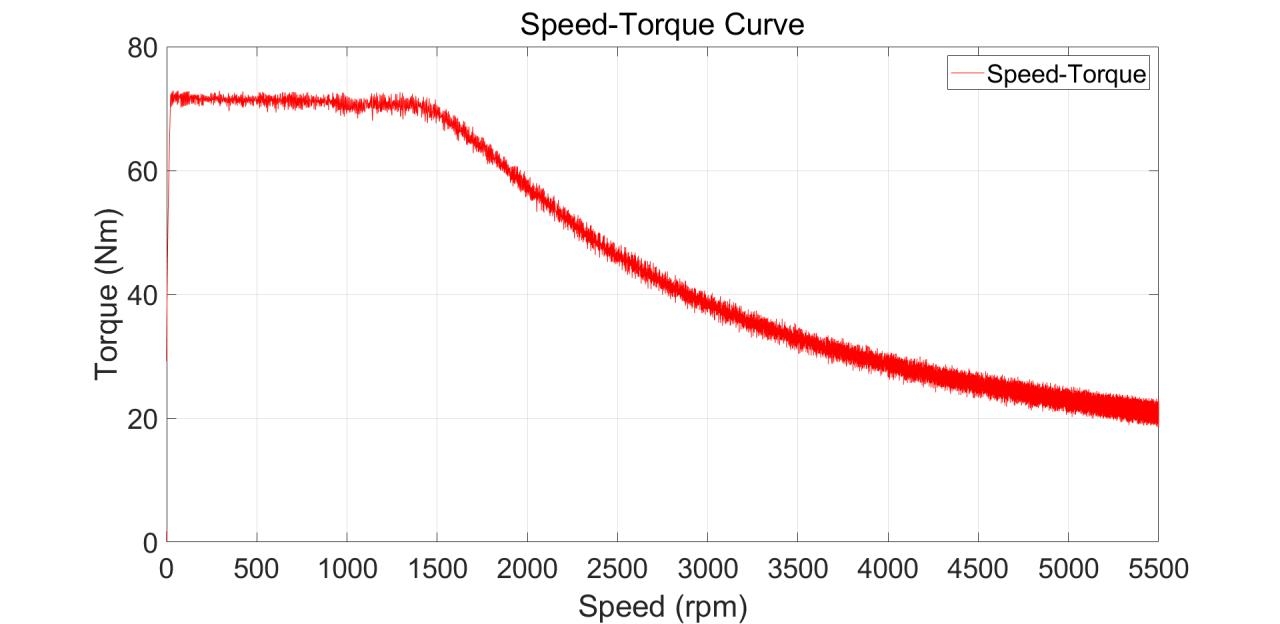
MTPA和弱磁控制模式切换
交直轴电流在控制过程中会根据负载和转速变化在MTPA(最大转矩电流比)和弱磁控制模式之间来回切换。MTPA模式能让电机在一定转速范围内以最小的电流产生最大的转矩,提高电机效率。而当转速升高到一定程度,为了维持电机的运行,就需要切换到弱磁控制模式。
比如说在Simulink模型里,可以通过一个判断模块,根据电机的转速和负载等信号来决定切换模式。像这样简单的逻辑判断代码(以伪代码为例):
if (speed > speed_threshold && load < load_threshold) {
// 切换到弱磁控制模式
control_mode = 'flux - weakening';
} else {
// 保持MTPA模式
control_mode = 'MTPA';
}这个永磁同步电机转速电流双闭环PI + MTPA + 弱磁控制Simulink仿真模型,融合了多种先进控制策略,通过SVPWM实现精准的电压矢量输出,利用双闭环PI控制稳定电机转速和电流,再加上MTPA和弱磁控制模式切换适应不同工况,是电机控制领域一个非常有价值的研究和应用方向。希望通过这些分析,能让大家对这个模型和其中的控制算法有更清晰的认识。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐



 11
11 0
0- 0



 已为社区贡献33条内容
已为社区贡献33条内容

所有评论(0)