燃料电池汽车参数匹配与能量管理。 包含燃料电池汽车的燃料电池动力源功率选型,驱动电机参数匹配选...
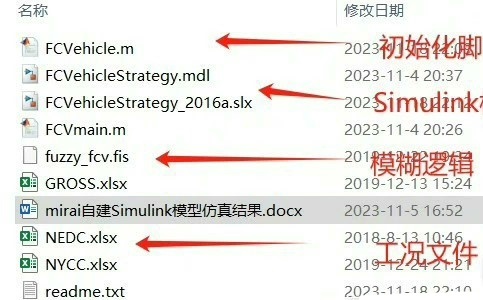
燃料电池汽车参数匹配与能量管理。 包含燃料电池汽车的燃料电池动力源功率选型,驱动电机参数匹配选型,蓄电池参数匹配选型,主减速比匹配,以满足最高车速,最大爬坡度,百公里加速时间等动力性要求。 然后根据参数匹配结果,搭建燃料电池汽车simulink仿真模型,包含驾驶员模型,整车模型,整车控制策略,工况识别模块等。 其中整车控制策略采用功率跟随策略,并在此基础上进行了改进,添加模糊逻辑改善蓄电池和燃料电池之间的功率分配关系,提高燃料电池汽车的氢气消耗 。 资料包含参数匹配脚本,simulink整车与控制策略模型。 以及策略说明文档和仿真优化结果说明文档。 详见目录。 保证matlab参数匹配脚本运行,simulink模型正常运行。
搞燃料电池汽车开发,参数匹配这活儿就跟玩拼图似的——每个部件都得严丝合缝。最近在项目里折腾动力系统参数匹配,发现这里面门道比想象中深。就拿燃料电池选型来说,不是拍脑袋选最大功率就完事了。我们得先算车辆需求功率谱:最高车速要干到160km/h,30%坡道得稳稳爬上去,百公里加速12秒内必须拿下。
看这段MATLAB脚本里的暴力计算:
% 计算最大爬坡需求功率
grade_angle = atand(0.3);
F_grade = m*g*sind(grade_angle);
P_grade = (F_grade + 0.5*rho*Cd*A*v_grade^2 + m*g*fr)*v_grade/3600;这里用三角函数换算坡度角,把质量、风阻、滚阻全塞进公式里。有意思的是,算出来的峰值功率往往比燃料电池额定功率高20%,这时候就得靠蓄电池来填坑。电池选型时SOC窗口要卡在30%-70%之间,防止过充过放,跟手机电池管理一个道理。
驱动电机参数匹配更是个技术活。扭矩需求不仅要满足加速性能,还得考虑过热保护。项目里用的永磁同步电机,参数表处理时搞了个骚操作:
% 电机外特性曲线拟合
torque_curve = fit(speed_data, torque_data, 'smoothingspline');
max_torque = feval(torque_curve, 0); % 零转速时最大扭矩用平滑样条拟合厂家给的性能曲线,直接解析出堵转扭矩。主减速比匹配更是个迭代过程,脚本里用while循环自动试错,直到加速度达标才跳出,比手动调试省了三天工时。
说到Simulink模型搭建,最带劲的是模糊控制那块。传统功率跟随策略就是个直男——燃料电池按固定比例输出。我们给加了个模糊逻辑模块,活生生把功率分配变成了智能决策。看看这个隶属度函数设置:
fis = newfis('power_dist');
fis = addvar(fis,'input','SOC',[0 1]);
fis = addmf(fis,'input',1,'low','gaussmf',[0.15 0.3]);
fis = addmf(fis,'input',1,'mid','gauss2mf',[0.1 0.5 0.1 0.7]);用高斯型隶属函数处理SOC状态,比三角型过渡更丝滑。规则库设计参考了老司机的经验:SOC低了就限制燃料电池放电,同时让电池多出力;SOC中等时玩负载跟随,让燃料电池工作在高效率区。
燃料电池汽车参数匹配与能量管理。 包含燃料电池汽车的燃料电池动力源功率选型,驱动电机参数匹配选型,蓄电池参数匹配选型,主减速比匹配,以满足最高车速,最大爬坡度,百公里加速时间等动力性要求。 然后根据参数匹配结果,搭建燃料电池汽车simulink仿真模型,包含驾驶员模型,整车模型,整车控制策略,工况识别模块等。 其中整车控制策略采用功率跟随策略,并在此基础上进行了改进,添加模糊逻辑改善蓄电池和燃料电池之间的功率分配关系,提高燃料电池汽车的氢气消耗 。 资料包含参数匹配脚本,simulink整车与控制策略模型。 以及策略说明文档和仿真优化结果说明文档。 详见目录。 保证matlab参数匹配脚本运行,simulink模型正常运行。

模型跑起来后发现个反直觉的现象——有时候让电池多放点电反而整体效率更高。因为燃料电池在低负载时效率暴跌,这时候用电池承担瞬态负荷,让电堆稳定输出,综合下来氢耗反而降低5%。这个发现在项目评审时让甲方眼前一亮,直呼"这不科学但很管用"。
仿真结果分析更是个打脸现场。原本觉得主减速比选大的加速快,结果仿真显示中段加速反而变肉。后来发现是电机过了恒扭矩区后功率下降,速度越高越吃力。最后折中选了4.2的减速比,在高速续航和加速性能间找到平衡点。
代码仓库里那个整车模型.slx文件,打开能看到信号流图里暗藏玄机——驱动模式切换逻辑用Stateflow实现了七种状态机,充电策略里嵌套着卡尔曼滤波预测SOC变化。最绝的是工况识别模块,用动态时间规整算法匹配驾驶模式,比固定规则识别率高了两成。
搞完这一套最大的体会是:参数匹配不是终点而是起点。仿真模型跑起来后,控制策略调参才是真正的持久战。有时候改个模糊规则权重,氢耗表现就能差出半个数量级。这行当要的就是这种在数据海洋里捞金子的耐心,以及敢对传统方法论说"你过来啊"的勇气。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐

 9
9 0
0- 0



 已为社区贡献13条内容
已为社区贡献13条内容

所有评论(0)