Zero-1-to-A 精读:从小白到博士,彻底拆解单图生成可动画头部 Avatar 的核心逻辑
Zero-1-to-A 精读:从小白到博士,彻底拆解单图生成可动画头部 Avatar 的核心逻辑
论文标题:Zero-1-to-A: Zero-Shot One Image to Animatable Head Avatars Using Video Diffusion
论文链接:Zero-1-to-A
文章定位:论文精读 / 数字人 / 3D Gaussian Splatting / 视频扩散模型 / 计算机视觉
适合人群:零基础读者、CV / 图形学研究生、准备复现论文的博士生与工程研究人员
文章目录
- Zero-1-to-A 精读:从小白到博士,彻底拆解单图生成可动画头部 Avatar 的核心逻辑
- 一句提示词帮你速通论文
- 前言
- 一、小白阶段:通俗易懂、引人入胜
- 二、硕士阶段:深入分析、渐入佳境
-
- 1. 基础概念:论文到底建立在什么技术上?
- 1)Animatable Gaussian Head
- 2)Portrait Video Diffusion
- 2. 核心方法框架
- 2.1 SymGEN:数据集和 Avatar 的共生优化
- 2.2 Avatar-Driven Dataset Enhancement 具体做什么?
- 2.3 Dataset-Refined Avatar Reconstruction:怎么训练 Avatar?
- 2.4 为什么要 Progressive Learning?
- 3. Progressive Learning 的两个阶段
- 3.1 Spatial Consistency Learning:从正脸到侧脸
- 3.2 Temporal Consistency Learning:从轻表情到夸张表情
- 4. 训练设置与工程参数
- 5. 实验设计与结果
- 5.1 静态头像效果
- 5.2 动态头像效果
- 5.3 消融实验
- 硕士一句话总结
- 三、博士阶段:深入拆解、实现复现
-
- 1. 研究动机与创新点
- 1.1 研究动机:为什么这个问题值得做?
- 1.2 创新点在哪里?
- 2. 数学推导与核心技术深拆
- 2.1 为什么 SDS 在这里会失效?
- 2.2 SymGEN 的本质:近似 EM / 自训练式一致化
- 2.3 DDIM inversion 在这里的意义
- 2.4 Progressive Learning 的公式含义
- 3. 如何复现:工程实现路线图
- 3.1 必备环境
- 3.2 复现流程分解
- 3.3 最关键的实现细节
- 关键点 A:dataset cache 不能只是“替换文件”
- 关键点 B:landmark control 非常重要
- 关键点 C:DDIM inversion 的稳定性
- 关键点 D:空间和时间课程的切换点
- 3.4 常见失败现象与排查
- 4. 实验结果深度分析
- 4.1 为什么它能比一些方法更快?
- 4.2 为什么 Spatial / Temporal 两个模块缺一不可?
- 4.3 为什么 Challenge Cases 能处理得不错?
- 5. 局限性与未来研究方向
- 5.1 已知局限
- 5.2 可以怎么改进?
- 6. 隐藏难点与研究挑战
- 6.1 难点一:伪数据集更新可能造成“灾难性漂移”
- 6.2 难点二:身份一致性和表情可动性之间的张力
- 6.3 难点三:视频扩散中的 3D 不可识别性
- 6.4 难点四:评测体系仍不够完备
- 博士一句话总结
- 全景总结:三句话收束整篇论文
一句提示词帮你速通论文
提示词
你现在是一位计算机视觉的博士,请你仔细阅读这篇论文,并将其拆解为小白阶段、硕士阶段、博士阶段。一定要引人入胜,客观具体,且极为详细。小白阶段你需要达到是个傻子都能懂的情况,在硕士阶段你需要达到正常使用一些专业数据,帮助小白从傻子到小专家的突破,在博士阶段你需要仔细拆解整篇论文,把各项细节全部记录,方便后期进行复现,同时促使小专家成为资深大拿
镜像地址,ChatGTP 5.4 Thinking助您深入解析、速通论文
邀请码地址,ChatGTP 5.4 Thinking助您深入解析、速通论文
前言
最近几年,3D 数字人(Avatar) 成了计算机视觉和图形学交叉领域的热门方向,从游戏、元宇宙到虚拟直播,都需要高保真、可驱动、实时渲染的数字人头。而数字人头生成有一个核心痛点:
传统高质量可动画头部 Avatar,要么需要大量多视角视频、专业采集设备,要么依赖海量合成数据,普通人手里只有一张照片时,根本做不出能转头、做表情的数字人。
同时,视频扩散模型 的兴起给 “补数据” 带来了希望 —— 它能根据单张图 “脑补” 出人物动起来的视频,但新问题又来了:
视频扩散生成的视频常常 “前后不一致、左右不对齐”,直接用这些视频训练 Avatar,结果会糊、软、假,五官还容易错位。
于是,这篇论文提出了一套直击痛点的解决方案:
不用海量真实数据,只用 “一张照片 + 视频扩散模型”,通过 “生成数据和 Avatar 共生优化 + 从简单到复杂的渐进学习”,做出稳定、真实、实时渲染的可动画头部 Avatar。
这篇文章我会把整篇论文拆成三个层次来讲:
- 小白阶段:用最直白的语言讲懂论文到底在做什么
- 硕士阶段:开始引入必要的数学、公式、实验和方法对比
- 博士阶段:按照“可复现、可推敲、可扩展”的标准,完整拆解论文细节
目标只有一个:
不只是让你“看过这篇论文”,而是让你真正“吃透这篇论文”。
一、小白阶段:通俗易懂、引人入胜
1. 这篇论文到底在解决什么问题?
你可以把它想成这样:
你手里只有 一张照片,但你想做出一个“会转头、会张嘴、会做表情”的数字人头。
这就像拿着一张明星海报,想把它变成一个能在游戏里说话、做表情、实时互动的 3D 分身。
难点在于:
- 只有一张图,看不到侧脸、看不到不同表情;
- 传统方法通常要很多视频、很多多视角数据,代价很大;
- 虽然现在有很强的视频扩散模型,可以“脑补”出人物动起来的视频,但这些视频常常前后不一致、左右不一致:
- 同一个人的眼睛,侧脸时可能突然位置不对;
- 连续两帧之间,小表情变化很小,但脸却突然“变了一点”;
- 结果就是学出来的数字头像会变得糊、软、假。
这篇论文指出,直接用扩散蒸馏思路去学 4D 头像,会因为空间和时间不一致,得到过于平滑的结果。
一个比喻
把这件事想成“拼图”:
- 你只有一张拼图封面(单张人脸图);
- AI 视频模型会帮你“猜”出其他拼图块(不同角度、不同表情的视频);
- 但这些猜出来的拼图块彼此不一定能严丝合缝拼起来;
- 这篇论文做的事,就是 一边修拼图块,一边拼整张图,并且按“先简单后复杂”的顺序来拼。
2. 论文的方法,简单来说是什么?
这篇论文有两个最重要的招:
招一:共生生成(SymGEN)
别一次性让视频模型生成一堆数据,然后死命去学;
而是让“生成数据”和“训练头像”互相帮助。
通俗理解
像请一个画师和一个雕塑师合作:
- 画师先根据你的一张照片,画一些“这个人可能转头、张嘴、眨眼”的视频;
- 雕塑师根据这些视频,先雕一个大概头像;
- 然后再让这个头像反过来指导画师:
“你这里眼睛位置不太对,嘴型也有点飘,按我这个 3D 结构来重新画。” - 画师改完,雕塑师再继续修;
- 如此反复,数据越来越稳,头像也越来越真。
也就是说:
生成数据 和 训练 Avatar 不是两条断开的流水线,而是一个闭环。
招二:渐进学习(Progressive Learning)
不要一开始就上最难的动作和角度,先从简单的学起。
论文把学习分成两步
第一步:空间一致性学习
先固定表情,只让脸 从正脸慢慢转到侧脸。
相当于先学会“这个人长什么样、从不同角度看起来应该怎样”。
第二步:时间一致性学习
再固定视角,让表情 从轻微变化慢慢过渡到夸张表情。
相当于再学会“这个人动起来时,嘴巴、眼睛、表情该怎么自然变化”。
3. 这个方法好在哪?又差在哪?
优势
① 只要一张图
这很厉害。传统高质量头像方法一般需要大量真人或合成数据,而这篇工作强调的是:
借助预训练视频扩散模型,把“缺的数据”补出来。
② 生成结果更真实、更稳定
因为它不是盲目相信视频扩散模型,而是让 3D Avatar 反过来帮助修正视频,因此最后学出来的头像在:
- 纹理细节
- 表情控制
- 连续帧稳定性
上都更好。
③ 渲染很快
论文展示的结果中,很多例子能到 70+ FPS 的实时渲染速度。
局限
① 头外区域处理不好
比如爆炸头、很蓬松的头发、头部外轮廓复杂的东西,不容易建好。
因为它底层是把高斯点绑在 FLAME 头模上,这种结构天生更擅长建“脸和头”,不擅长建“头外飞出来的头发”。
② 还是依赖视频扩散模型的质量
如果视频扩散本身“脑补错了”,这套方法虽然能修,但不是万能。
③ 极端情况仍有挑战
比如非常夸张的表情、极端侧脸、遮挡严重场景,虽然它比基线更稳,但并非完全无误。
小白一句话总结
这篇论文像是在用“一张照片 + 一个会脑补的视频 AI + 一个会自我纠错的 3D 头像系统”,一步步做出会动、会转头、还能实时渲染的数字人脸。
二、硕士阶段:深入分析、渐入佳境
下面开始进入技术层。
1. 基础概念:论文到底建立在什么技术上?
这篇方法的底座有两个:
1)Animatable Gaussian Head
它用的是一种 可动画的 3D Gaussian 头部表示。
简单说,不是用传统网格把脸表面硬邦邦地表示出来,而是用很多 3D 高斯小点来组成头部外观;这些高斯点又被绑定到 FLAME 头部模型上,所以当 FLAME 的姿态和表情参数变化时,这些高斯点也会跟着动。
这样就能同时兼顾:
- 几何可控
- 表情可驱动
- 渲染速度快
2)Portrait Video Diffusion
这是第二个底座:用现成的 人像视频扩散模型 生成“同一个人动起来”的视频。
这些模型一般有几个关键模块:
- 身份注入:保证生成的人还是参考图里的那个人;
- 动作/表情控制:通常借助 landmark map 等控制信号;
- 时间注意力:提高帧间一致性。
但问题是,即使有 temporal attention,仍然会存在空间和时间不一致。
这正是本文的出发点。
2. 核心方法框架
论文方法 = SymGEN + Progressive Learning
2.1 SymGEN:数据集和 Avatar 的共生优化
核心思想
不是用 SDS 直接把扩散模型输出“硬蒸馏”进 3D 表示,而是改成:
- 用视频扩散生成伪视频数据;
- 用这些视频训练 4D Avatar;
- 用当前 Avatar 的渲染结果反向帮助修正视频数据;
- 更新数据集;
- 继续训练 Avatar。
这就形成了所谓的双向循环:
- Avatar-Driven Dataset Enhancement
- Dataset-Refined Avatar Reconstruction
2.2 Avatar-Driven Dataset Enhancement 具体做什么?
设数据集为:
D n = { ( V i , P i , E i ) } i = 1 n D^n=\{(V_i,P_i,E_i)\}_{i=1}^{n} Dn={(Vi,Pi,Ei)}i=1n
其中:
- V i V_i Vi:伪真值视频
- P i P_i Pi:对应相机序列
- E i E_i Ei:对应表情序列
步骤如下:
Step 1:Avatar 先渲染一段视频
根据当前的头部模型,在给定相机/表情序列下渲染视频。
Step 2:提取人脸 landmark map
用 Mediapipe 提取渲染视频的脸部关键点图,作为几何约束。
Step 3:DDIM inversion
把渲染视频编码成 latent z i 0 z_i^0 zi0,再通过 DDIM inversion 得到噪声 z i T z_i^T ziT。
这个操作的直观意义是:
把当前 Avatar 渲染结果“映射回扩散模型的噪声空间”,这样扩散模型在反向去噪时,就不是从纯随机噪声开始,而是从“和当前 Avatar 接近”的起点出发。这样生成的 refined video 会更稳定。
Step 4:扩散细化得到 z ^ i 0 \hat z_i^0 z^i0
在 landmark 几何引导下,从 z i T z_i^T ziT 去噪,得到 refined latent,再 decode 成 refined video V ^ i \hat V_i V^i。
Step 5:更新数据集
用 V ^ i \hat V_i V^i 替换原来的 V i V_i Vi。
也就是说,数据集不是固定不变的,而是跟着 Avatar 一起成长的。
2.3 Dataset-Refined Avatar Reconstruction:怎么训练 Avatar?
论文使用如下重建损失:
L = λ 1 L 1 + λ l p i p s L L P I P S + λ p o s L p o s + λ s L s L=\lambda_1 L_1+\lambda_{lpips}L_{LPIPS}+\lambda_{pos}L_{pos}+\lambda_s L_s L=λ1L1+λlpipsLLPIPS+λposLpos+λsLs
其中:
- L 1 L_1 L1:像素级重建误差
- L L P I P S L_{LPIPS} LLPIPS:感知损失,让视觉细节更自然
- L p o s L_{pos} Lpos:位置约束
- L s L_s Ls:尺度约束,使 3D 高斯与 FLAME 对齐,避免离群点
权重为:
λ 1 = 10 , λ l p i p s = 10 , λ p o s = 0.1 , λ s = 10 \lambda_1=10,\quad \lambda_{lpips}=10,\quad \lambda_{pos}=0.1,\quad \lambda_s=10 λ1=10,λlpips=10,λpos=0.1,λs=10
直观理解
- L 1 L_1 L1:像“逐像素对答案”
- L L P I P S L_{LPIPS} LLPIPS:像“看起来像不像”
- L p o s L_{pos} Lpos、 L s L_s Ls:像“别让高斯点乱跑,得贴着合理的人脸结构”
2.4 为什么要 Progressive Learning?
这里有一个典型的 chicken-or-egg 困境:
- 一开始 Avatar 很差;
- 差 Avatar 渲染出来的引导也差;
- 差引导会让视频扩散修数据时继续不一致;
- 数据不一致又会让 Avatar 更难学好。
所以必须先让系统在“容易学”的地方建立稳定性。
3. Progressive Learning 的两个阶段
3.1 Spatial Consistency Learning:从正脸到侧脸
思想
固定表情,只学视角变化。
先看正脸,再逐渐加入更侧的角度。
论文构造一条相机轨迹:
P ^ = { p ^ i } i = 1 n f \hat P=\{\hat p_i\}_{i=1}^{n_f} P^={p^i}i=1nf
从 frontal 开始,到随机 side view 结束,中间插值。
训练时,真实使用的相机序列按如下方式逐步解锁:
p i = p ^ min ( i , j ) p_i=\hat p_{\min(i,j)} pi=p^min(i,j)
j = min ( ⌊ k d s ⌋ + 1 , n f ) j=\min\left(\left\lfloor \frac{k}{d_s} \right\rfloor+1,n_f\right) j=min(⌊dsk⌋+1,nf)
其中:
- k k k:训练迭代数
- d s d_s ds:更新间隔
- j j j:当前允许看到的轨迹位置上限
直观理解
像教小孩认人脸:
- 先只看正脸照片;
- 再看 15° 转头;
- 再看 30°;
- 最后才看大侧脸。
这样做的好处是先把 眼睛、嘴、五官对应关系 学稳。
3.2 Temporal Consistency Learning:从轻表情到夸张表情
思想
固定相机,只学表情变化。
而且不是一上来就学张大嘴、大笑、夸张表情,而是:
- 先用简单、平缓的合成表情序列;
- 后期再加真实世界中更夸张的表情序列。
可以把这个阶段理解成:
D T = D T s y n → D T s y n ∪ D T r e a l \mathcal{D}_T = \mathcal{D}^{syn}_T \rightarrow \mathcal{D}^{syn}_T \cup \mathcal{D}^{real}_T DT=DTsyn→DTsyn∪DTreal
直观理解
先学“微笑、眨眼”,再学“大笑、夸张张嘴、情绪激动”。
这样做的结果是:
系统先掌握“基本控制”,再提升“泛化能力和真实感”。
4. 训练设置与工程参数
论文给了比较清晰的实现细节:
模型与初始化
- 4D Avatar 基于 animatable Gaussian head;
- 每个 mesh triangle 初始化 10 个均匀分布的 3D 高斯;
- 眼睑附近高斯初始 opacity 提高,以便更自然闭眼;
- 默认视频扩散模型使用某个预训练 portrait video diffusion,CFG weight = 3.5。
训练流程
总共 10,000 iterations:
- 初始只用 spatial dataset: n s = 20 n_s=20 ns=20
- 每隔 d s = 1000 d_s=1000 ds=1000 iterations 渐进更新
- 到 k s = 5000 k_s=5000 ks=5000 后加入 temporal synthetic expressions: n s y n = 10 n_{syn}=10 nsyn=10
- 到 k t = 8000 k_t=8000 kt=8000 后再加入 real expressions: n r e a l = 10 n_{real}=10 nreal=10
训练硬件与耗时
- PyTorch + threestudio
- 分辨率 512
- batch size n f = 8 n_f=8 nf=8
- 单张 NVIDIA A6000 48GB
- 训练约 5 小时
- 优化器 Adam,betas = [ 0.9 , 0.99 ] [0.9, 0.99] [0.9,0.99]
5. 实验设计与结果
5.1 静态头像效果
论文把它和多个静态头部生成方法比较。结果显示:
- 在纹理和几何细节上更好;
- CLIP-Score 也更强。
例如:
- ViT-L/14: 0.285 0.285 0.285
- ViT-B/16: 0.320 0.320 0.320
- ViT-B/32: 0.322 0.322 0.322
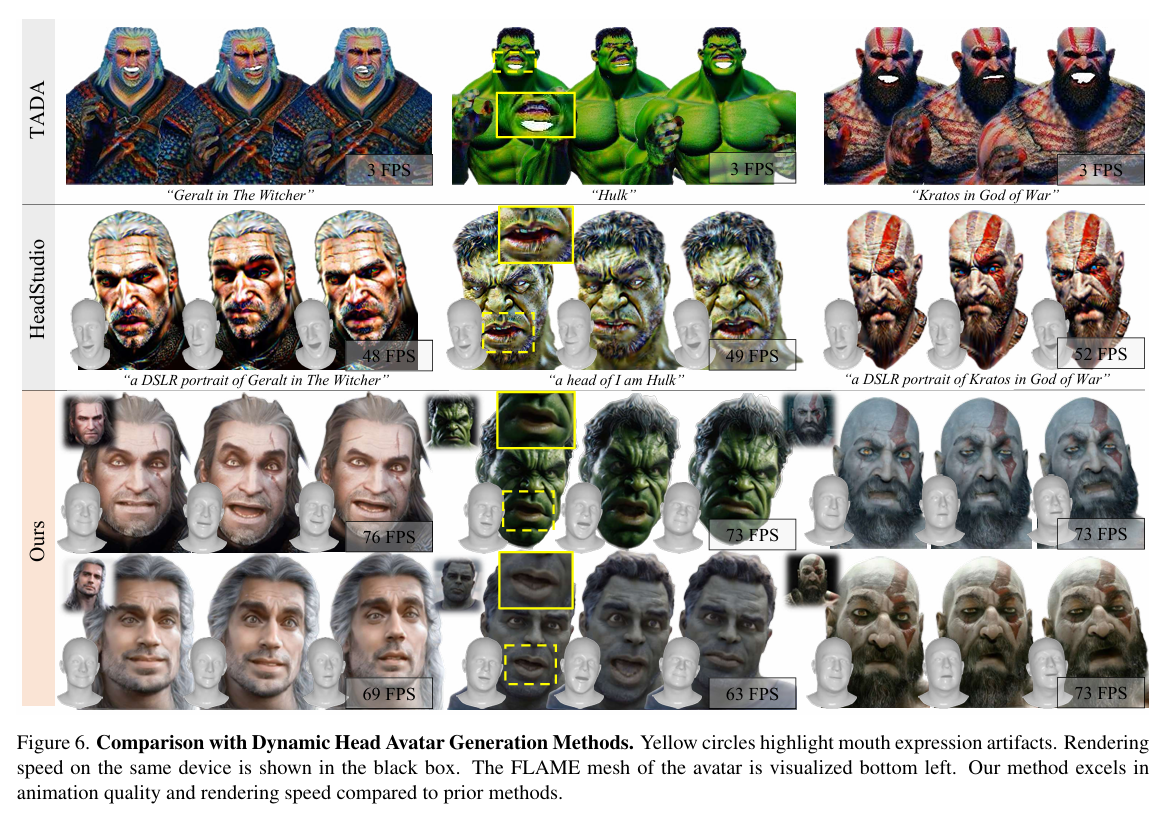
5.2 动态头像效果
和动态方法对比时:
- 动画伪影更少,尤其嘴部;
- 渲染速度更快,例如可达 76 FPS。
5.3 消融实验
消融实验很关键。它比较了:
- SDS Loss
- One-time Dataset Update
- 去掉 Progressive Learning
- 去掉 Temporal Consistency Learning
- 去掉 Spatial Consistency Learning
- Full Model
结论非常明确:
- 只用 SDS:过平滑,细节差;
- 只一次性更新数据集:比 SDS 好,但动画质量仍弱;
- 没有 Progressive Learning:眼睛、牙齿、嘴型更容易错位;
- 没有 Temporal Consistency:夸张表情时嘴部伪影严重;
- 没有 Spatial Consistency:眼睛位置容易错。
硕士一句话总结
这篇论文的独特之处在于:它没有直接用视频扩散“硬监督”4D 头像,而是通过“数据集和 Avatar 共生更新 + 从简单到复杂的渐进学习”,把不稳定的视频生成转化成稳定的可驱动头像重建。
三、博士阶段:深入拆解、实现复现
下面进入研究者视角。
1. 研究动机与创新点
1.1 研究动机:为什么这个问题值得做?
4D 头部 Avatar 的理想目标是:
- 单图输入
- 高保真
- 可驱动
- 实时渲染
- 不依赖昂贵采集
但现有路线大致有两个问题:
路线 A:数据驱动重建
依赖大量多视角、视频或合成数据。成本高,泛化有限。
路线 B:SDS 式扩散蒸馏
不需要数据,但 3D/4D 一致性差。尤其视频扩散存在:
- 跨视角 identity drift
- 邻帧时间漂移
- 局部几何不稳定
这使 SDS 在视频场景下尤其容易得到 over-smooth 的解。
所以本文的关键问题是:
如何在不需要真实 4D 训练数据的情况下,把“本来不一致的视频扩散先验”转化为“可用的一致性监督”,进而训练一个高质量的 animatable avatar?
1.2 创新点在哪里?
我认为这篇论文的创新可拆成三层:
创新点 1:从 “SDS 直接蒸馏” 改成 “合成数据集重建”
这是范式变化。
不是每一步都让 diffusion 跟渲染结果“当场对齐”,而是让 diffusion 先变成一个伪数据生成器,再通过重建 loss 优化 avatar。
这绕开了 SDS 在视频不一致场景下的梯度噪声问题。
创新点 2:SymGEN 共生机制
不是静态伪数据集,而是 可更新缓存数据集。
Avatar 反过来参与修正视频扩散输出,使数据集越来越接近一个 3D/4D 一致的“伪真值域”。这是论文最核心的工程-算法结合点。
创新点 3:显式拆解空间一致性与时间一致性
论文不是模糊地说 curriculum learning,而是明确分为:
- 固定表情学视角
- 固定视角学表情
这个拆分非常契合视频人脸生成中的两种主要不一致来源。
2. 数学推导与核心技术深拆
2.1 为什么 SDS 在这里会失效?
SDS 本质上用 diffusion score 去指导 3D 表示,让渲染图朝高概率图像分布移动。
但当你的“目标分布”本身在跨视角、跨时间上不稳定时,score 方向就会摇摆不定:
- 同一身份的侧脸约束互相冲突;
- 相邻表情帧不连续;
- 局部几何信息不稳定。
于是就容易出现:
- 高频细节消失
- 局部被平均化
- 表情控制塌缩
这正是论文所说的 “over-smooth results”。
从优化角度理解
如果把真实一致性目标写成 y ∗ y^* y∗,而视频扩散每次给你的伪目标是 y t y_t yt,且 y t y_t yt 在时间和视角上高方差,那么最小化:
E t ∥ f θ ( x t ) − y t ∥ \mathbb{E}_t \left\| f_\theta(x_t)-y_t \right\| Et∥fθ(xt)−yt∥
得到的往往是均值解,而不是锐利可信的身份/结构解。
本文通过 缓存 + 迭代更新 把 y t y_t yt 逐渐收敛到更一致的版本。
2.2 SymGEN 的本质:近似 EM / 自训练式一致化
从研究角度,这个过程很像一个近似的 EM 或 self-training:
E-like step
在当前 Avatar 条件下,利用扩散模型与 landmark 几何控制生成 refined pseudo labels,即更新 V ^ i \hat V_i V^i。
M-like step
固定 refined dataset,优化 Avatar 参数,使渲染更贴近这些 refined pseudo labels。
然后重复。
这和一些迭代式编辑-重建的工作有相似思想,但这里不是“文本编辑 3D 场景”,而是“单图头像 → \rightarrow → 视频驱动数据集 → \rightarrow → 4D 头像”的一致性闭环。
2.3 DDIM inversion 在这里的意义
为什么不用直接随机采样 refined video,而要 inversion?
因为 inversion 提供了一个 与当前 Avatar 渲染结果对应的 latent 起点。
这样 refined video 不是“另起炉灶”,而是在当前 Avatar 附近做受控修正。
这有两个好处:
- identity anchoring:不会轻易跑成另一个人;
- optimization continuity:数据集更新是平滑的,不会大幅跳变。
如果你复现时把 inversion 换成纯噪声起点,通常会看到:
- 数据集更新抖动更大;
- 身份稳定性下降;
- 训练更难收敛。
2.4 Progressive Learning 的公式含义
空间阶段
p i = p ^ min ( i , j ) p_i=\hat p_{\min(i,j)} pi=p^min(i,j)
j = min ( ⌊ k d s ⌋ + 1 , n f ) j=\min\left(\left\lfloor \frac{k}{d_s} \right\rfloor+1,n_f\right) j=min(⌊dsk⌋+1,nf)
本质是在训练早期把相机轨迹裁短,只暴露前半段视角。
这是一种 逐步扩展训练分布支持集 的做法。
优点是:
- 降低早期监督噪声
- 稳定五官 canonical correspondence
- 建立 frontal anchor
时间阶段
论文没有写出复杂公式,但策略本质是 curriculum over expression complexity:
D T = D T s y n → D T s y n ∪ D T r e a l \mathcal{D}_T = \mathcal{D}^{syn}_T \rightarrow \mathcal{D}^{syn}_T \cup \mathcal{D}^{real}_T DT=DTsyn→DTsyn∪DTreal
也就是先低难度分布,再加入高难度真实分布。
3. 如何复现:工程实现路线图
下面给一个尽量贴近论文的复现方案。
3.1 必备环境
硬件
- GPU:至少 1 张 48GB 显存级别比较稳,论文使用 A6000 48GB
- 如果是 24GB 显存,也许可以通过降分辨率、减 batch、减少视频帧数来试,但质量和速度可能会掉
软件
- Python 3.10 左右
- PyTorch
- threestudio
- 3D Gaussian Splatting 相关依赖
- FLAME 模型
- Mediapipe
- 视频扩散模型实现
- DDIM inversion 代码
- LPIPS
数据
- 输入只需 1 张参考肖像图
- 额外需要:
- 合成表情序列来源
- 真实表情序列来源
- landmark 驱动信号
3.2 复现流程分解
第一步:准备参考图
要求尽量:
- 脸清晰
- 遮挡少
- 头部居中
- 分辨率足够
- 表情不要太极端
第二步:初始化 Gaussian Avatar
按论文设置:
- 使用 animatable Gaussian head
- 每个三角形上初始化 10 个高斯
- 对眼睑附近高斯提高初始 opacity
第三步:构建 spatial dataset
- 固定某个基本表情
- 构造从 frontal 到 side 的相机轨迹
- 让视频扩散基于参考图 + landmark 生成对应视频
- 初始 n s = 20 n_s=20 ns=20
第四步:只训练空间阶段
训练前 5000 iter 左右,逐渐扩展视角范围。
这一步目标不是学会复杂表情,而是:
- 身份锁定
- 视角一致
- 五官结构初步对齐
第五步:加入 temporal synthetic expressions
到 5000 iter 后,加入 n s y n = 10 n_{syn}=10 nsyn=10 的合成表情视频。
保持 near-frontal camera,重点学习嘴、眼、表情时间变化。
第六步:加入 real exaggerated expressions
到 8000 iter 后,再加 n r e a l = 10 n_{real}=10 nreal=10 真实表情序列。
这是提升泛化和真实感的关键阶段。
第七步:持续执行 SymGEN 更新
每次训练时随机采样数据做重建;
每隔 d = 30 d=30 d=30 iter 执行一次 dataset update。
3.3 最关键的实现细节
关键点 A:dataset cache 不能只是“替换文件”
你需要真正维护一个可更新的 dataset object,里面记录:
- 视频帧
- 相机参数
- 表情参数
- 更新版本号
否则你很难做稳定的增量更新和调试。
关键点 B:landmark control 非常重要
SymGEN 里,landmark 不只是驱动信号,更是几何纠偏器。
如果 landmark 提取不稳定,尤其侧脸或遮挡时失败,那么 refined video 质量会显著下降。
调试建议
- 检查每帧 landmark 可视化
- 统计关键点缺失率
- 对异常帧做过滤或插值
关键点 C:DDIM inversion 的稳定性
你要注意 inversion 的步数、噪声调度和 CFG 设置。
CFG 太高容易过拟合条件,太低则 identity 不稳。
关键点 D:空间和时间课程的切换点
5000 和 8000 iter 这些阈值不是随便写的,它们控制:
- 什么时候 Avatar 已经足够稳,可吸收更复杂监督;
- 什么时候引入真实夸张表情不会直接把训练打爆。
复现时如果更换数据域或扩散模型,这两个阈值很可能要调。
3.4 常见失败现象与排查
失败 1:结果太糊
可能原因:
- 只做了一次 dataset update
- diffusion 输出不稳
- LPIPS 权重不足
- Gaussian 点数不够或初始化差
失败 2:眼睛错位 / 牙齿漂移
可能原因:
- 没有 spatial curriculum
- 侧脸 landmark 不准
- frontal 阶段训练不够
失败 3:夸张表情嘴巴崩坏
可能原因:
- temporal consistency learning 不足
- 合成表情到真实表情的迁移过快
- mouth region 的监督稀疏
失败 4:头发糊成一团
可能原因:
- FLAME 绑定高斯的表示能力上限
- 头外区域缺乏独立建模
4. 实验结果深度分析
4.1 为什么它能比一些方法更快?
一个合理解释是:
SymGEN 提供了比 SDS 更稳定、准确的监督,因此可以用 更少的 Gaussian points 建出更精确的数字人,进而提升渲染效率。
更深一层地看:
- SDS 监督 noisy,模型往往要靠更复杂表示“补救”;
- 重建式训练 supervision 更明确;
- FLAME-rigged Gaussian 方案本身渲染也很高效。
所以这是“表示 + 监督范式”共同导致的速度优势。
4.2 为什么 Spatial / Temporal 两个模块缺一不可?
从消融图可以看出:
没有 Spatial
- 眼睛错位
- 面部局部定位不准
- 控制信号对不上人脸结构
没有 Temporal
- 新表情泛化差
- 嘴部在夸张表情中出现明显伪影
这说明:
- Spatial consistency 解决的是 跨视角身份 / 结构配准
- Temporal consistency 解决的是 跨帧表情动态建模
二者对应不同的误差源,因此不能互相替代。
4.3 为什么 Challenge Cases 能处理得不错?
像侧脸输入、闭眼输入、遮挡输入,仍能得到可驱动结果,原因可能有三点:
- 视频扩散模型本身具备强补全先验;
- FLAME + Gaussian 表示给了较强结构归纳偏置;
- Progressive Learning 先把简单模式学稳,减少了直接在困难样本上崩溃的概率。
不过这里也要保持谨慎:
展示的 challenge cases 不代表所有极端输入都稳。
5. 局限性与未来研究方向
5.1 已知局限
① 头外区域表示不足
最典型就是头发、帽子、大饰品、耳饰外延区域。
根因是高斯绑定在 FLAME mesh 上,表达自由度受限。
② 依赖外部视频扩散先验
换个更弱的视频扩散模型,SymGEN 的上限会下降。
③ 驱动表示较依赖 landmark
如果 landmark 无法充分表示复杂表情,比如舌头、唇齿细节、皱纹微结构,最终控制精度会受限。
④ 单图重建的不可观测区域仍靠“猜”
比如后脑、耳后、被遮挡区域,本质仍是先验补全,不是真实恢复。
5.2 可以怎么改进?
方向 1:引入头发 / 配饰的独立表示
比如:
- Gaussian hair
- 独立头外高斯云
- 分层 avatar 表示(face / hair / accessory)
方向 2:多条件驱动
不仅用 landmark,还可加入:
- audio
- dense expression code
- optical flow
- semantic face parsing
方向 3:联合 3D-aware video diffusion
不是把视频扩散当黑盒,而是让 diffusion 自身更懂 3D 约束。
方向 4:从单图扩展到单图 + 少量视频
用极少真实视频作为校正信号,做更稳的一次性个性化重建。
方向 5:不只做头部,扩展到 bust / full avatar
这会需要更强的身体与服饰可动画表示。
6. 隐藏难点与研究挑战
这些往往是论文没展开,但复现时你会踩坑的地方。
6.1 难点一:伪数据集更新可能造成“灾难性漂移”
如果某次 refined video 更新质量很差,而你又直接覆盖掉旧数据,就可能把系统带偏。
更稳妥的工程做法可能是:
- EMA 式数据更新
- 保留 top-k 版本
- 引入数据质量评分再替换
6.2 难点二:身份一致性和表情可动性之间的张力
约束太强:
- 表情动不起来,脸会僵
约束太弱:
- 动起来就不像本人
SymGEN + curriculum 本质上是在平衡这个 trade-off,但如何在不同人物域、卡通风格、遮挡域下自动调节,仍是开放问题。
6.3 难点三:视频扩散中的 3D 不可识别性
即使帧间看起来顺,仍可能存在:
- 左右眼轻微深度漂移
- 嘴唇厚度不稳定
- 鼻梁侧面不一致
这些 2D 看不明显,但 4D avatar 一驱动就暴露。
这说明未来更深的方向可能是:
让伪标签生成阶段就显式引入多视角几何一致性。
6.4 难点四:评测体系仍不够完备
真正针对 4D Avatar 还缺很多更精准的指标,比如:
- identity consistency under expression change
- temporal smoothness metric
- controllability fidelity
- geometry faithfulness under novel view
这也是整个领域的共性问题。
博士一句话总结
Zero-1-to-A 的真正贡献,不只是“单图生成可动画头像”,而是提出了一种把“不稳定的视频扩散先验”通过共生式数据集更新与分阶段一致性学习,转化为“可重建、可控制、可实时渲染的 4D Avatar 监督信号”的新范式。
全景总结:三句话收束整篇论文
小白一句话总结
它教会 AI 用一张照片先“脑补”这个人怎么转头、怎么做表情,再边学边改,最后做出一个会动的数字人头。
硕士一句话总结
它的关键不是直接蒸馏视频扩散,而是通过 SymGEN 构造可迭代修正的伪数据集,再用空间 / 时间分阶段学习,显著提升了头像的一致性、动画质量和实时性。
博士一句话总结
这篇工作把单图 4D 头像生成从 noisy SDS 优化,推进到了“自举式伪数据重建 + 课程式一致性建模”的框架,为数据稀缺条件下的高保真可动画数字人提供了具有扩展潜力的研究路径。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐

 10
10 0
0- 0



 已为社区贡献9条内容
已为社区贡献9条内容

所有评论(0)