Kimodo 入门教程(二)英伟达开源人形机器人动捕数据集训练运动学动作扩散模型
系列文章目录
目录
4.3 适用于 Kimodo-SMPLX 的 AMASS NPZ 格式
前言

Kimodo 是一个基于大规模(700 小时)商用友好型光学动作捕捉数据集训练而成的运动学动作扩散模型。该模型可生成高质量的人体和机器人 3D 动作,并通过文本提示以及一系列约束条件(如全身姿态关键帧、末端执行器位置/旋转、2D 路径和 2D 路点)进行控制。详情请参阅项目页面。
亮点
- 受控生成
- 结合文本提示与全身、根节点及末端执行器约束。
- 人类(类人)支持
- 同时提供数字人类和类人机器人的模型变体。
- 交互式演示
- 时间轴编辑、实时3D可视化及示例预设。
一、交互式演示
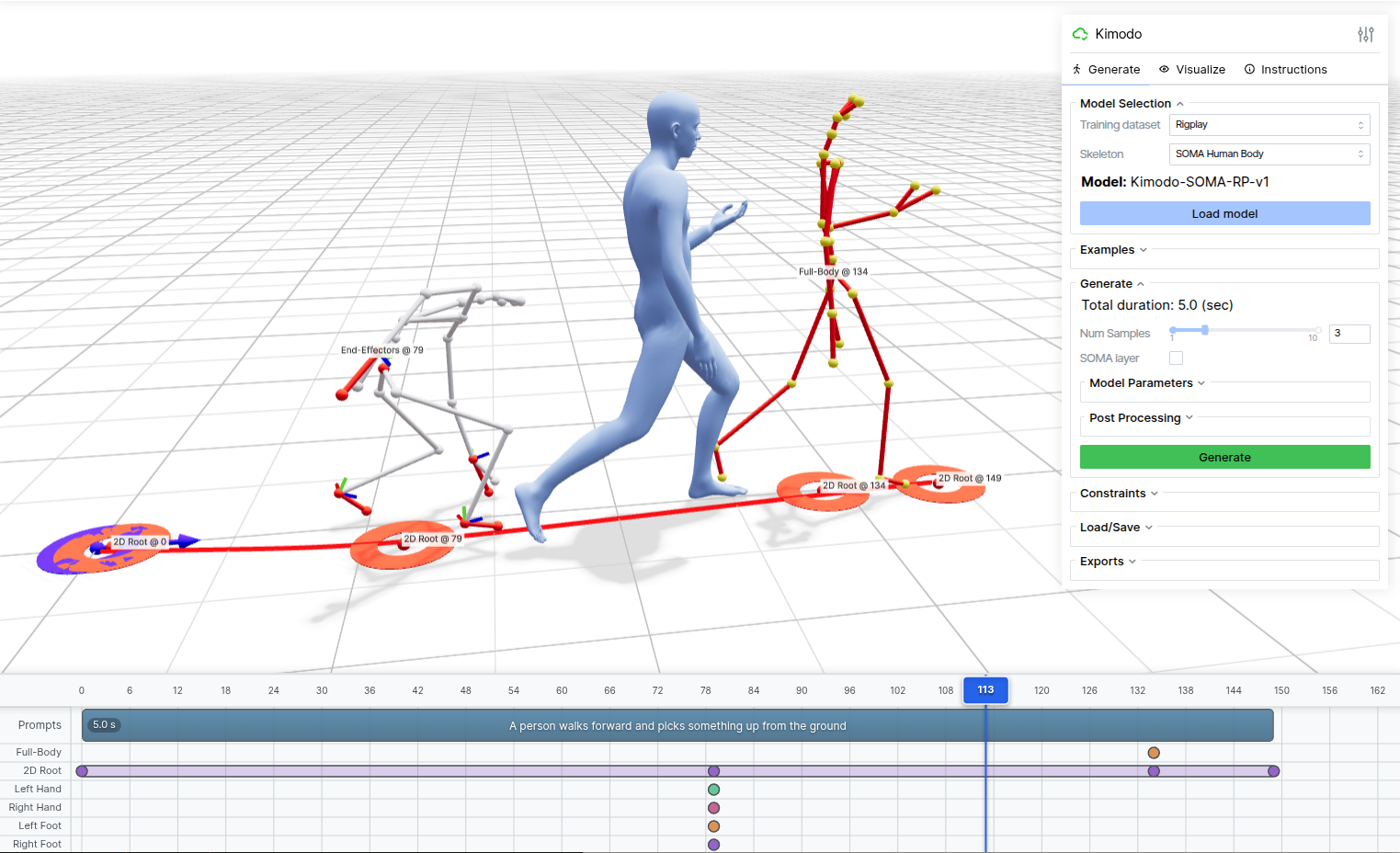
这款基于网页的交互式演示提供了直观的界面,可用于使用任何一种 Kimodo 模型变体生成运动轨迹。
注意:
要查看演示的实际运行效果,请按照下面的设置说明进行操作,并在本地启动演示程序。启动后,请在网页浏览器中访问 http://127.0.0.1:7860 打开演示程序;如果是在服务器上运行,请使用端口转发。
该演示提供了一个基于时间轴的界面,用于编写文本提示和约束条件,并支持实时3D可视化。以下是部分主要功能:
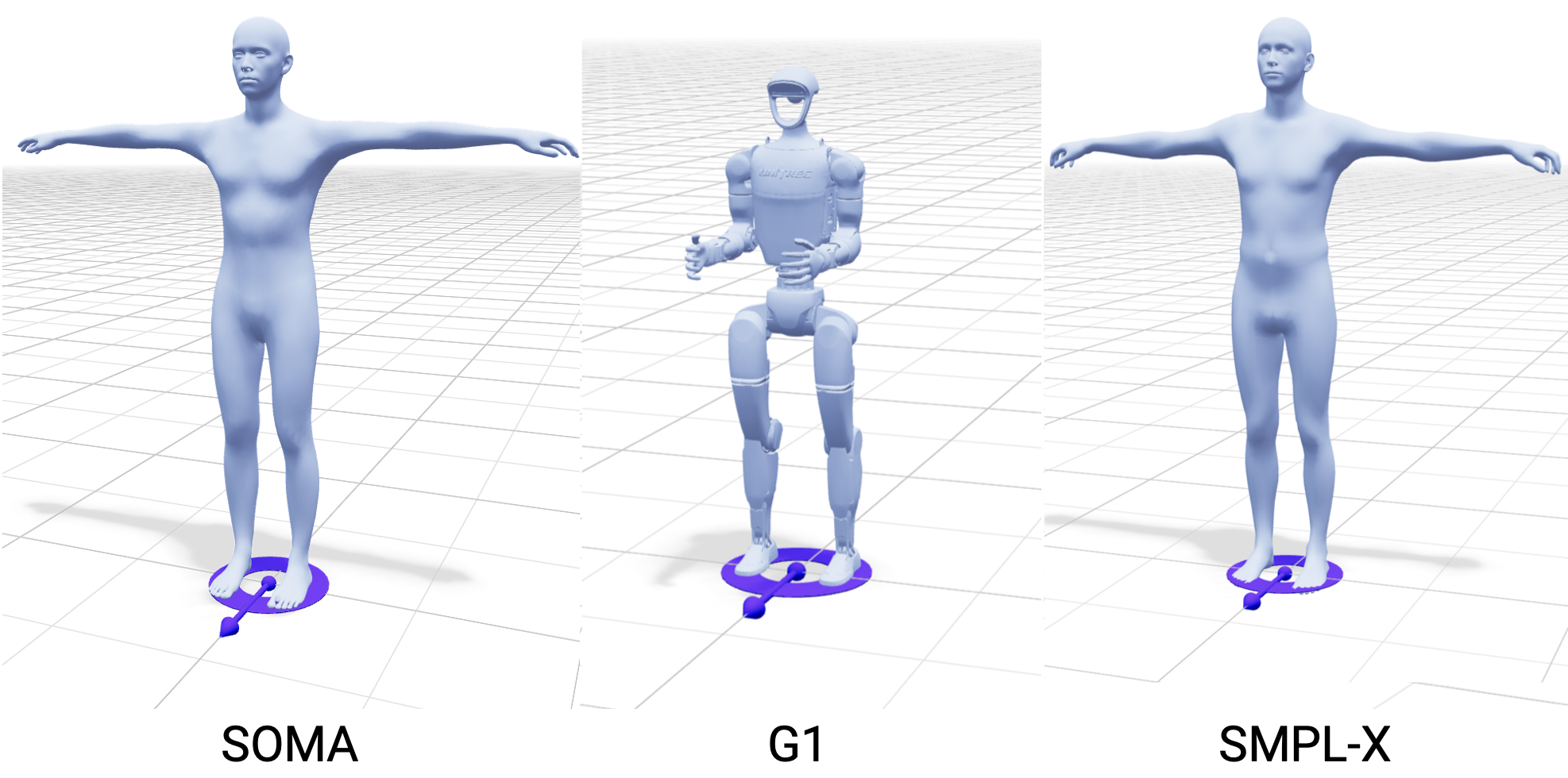
- 多角色支持:支持使用 Kimodo 的 SOMA、G1 和 SMPL-X 版本进行生成
- 文本提示:在时间轴上输入一个或多个描述所需动作的自然语言描述
- 时间轴编辑器:在多个约束轨道上添加和编辑关键帧及受约束区间
- 约束类型:
- 全身约束:在特定帧设置完 整的关节位置约束
- 2D 根点:在地面平面上定义路径 点或完整路径以供跟随
- 末端执行器:控制手部和脚部的位 置/旋转角度
- 约束编辑:编辑模式支持重新调整约束姿势或修改路径点
- 3D 可视化:实时渲染生成的动作,支持骨骼和蒙皮网格选项
- 播放控制:以可调节的播放速度预览生成的动作
- 多重样本:生成并比较多种动作变体
- 示例:加载现成示例以更好地了解 Kimodo 的功能
- 导出:保存约束和生成的动作以备后用
1.1 运行演示程序
按照安装说明操作后,可通过以下命令启动演示程序。演示程序将在网页浏览器中运行,地址为 http://localhost:7860。
若在服务器上运行演示程序,可使用端口转发进行访问。
若要在远程服务器上访问演示程序的 Web 界面,请设置 SSH 端口转发,以便您的 Web 浏览器能够像访问本地服务器一样访问 http://localhost:7860。
- 在 SSH 配置文件中添加 LocalForward
编辑(或创建)您的 SSH 配置文件(通常位于 ~/.ssh/config):
Host your-server-name HostName your.server.address User username LocalForward 7860 localhost:7860然后连接到:
ssh your-server-name - 直接使用 SSH 命令行
在您的本地计算机上运行:ssh -N -L 7860:localhost:7860 username@your.server.address这将把您的本地端口 7860 转发到服务器的端口 7860。连接成功后,请在网页浏览器中打开 http://localhost:7860。
请将 username 和 your.server.address 替换为您实际的用户名和服务器地址。
如果您需要频繁重启演示,建议先按照快速入门指南中的说明,在后台启动文本编码器服务。如果文本编码器服务未运行,演示将自动加载文本编码器模型。
演示在启动时以及用户界面中更改模型首选项时,也会自动下载 Kimodo 模型检查点。
1.1.1 从命令行启动
无论您是通过软件包还是源代码安装的 Kimodo,均可使用以下命令启动演示程序:
kimodo_demo1.1.2 使用 Docker 启动
如果您是通过 Docker 安装的,可以使用以下命令启动演示:
docker compose up demo如果您在 Docker 容器中运行 Kimodo,以下命令可能会对您有所帮助。在下面的示例命令中,您也可以将 demo 替换为 text-encoder:
查看日志:
docker compose logs demo停用服务:
docker compose stop demo重启服务:
docker compose restart demo停止并移除所有内容:
docker compose down1.2 UI 概述
本页面概述了演示界面的各个主要元素及其使用方法。
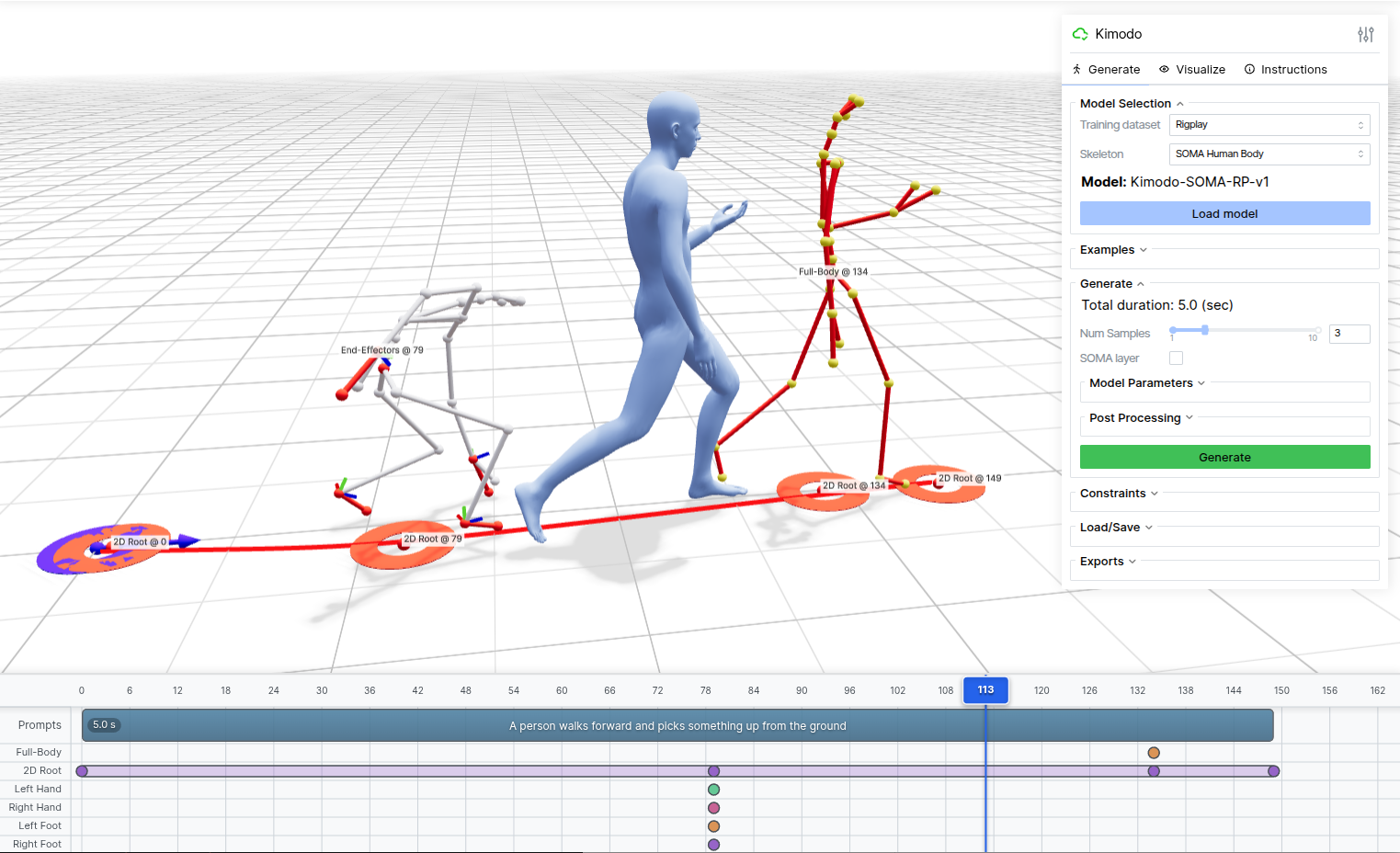
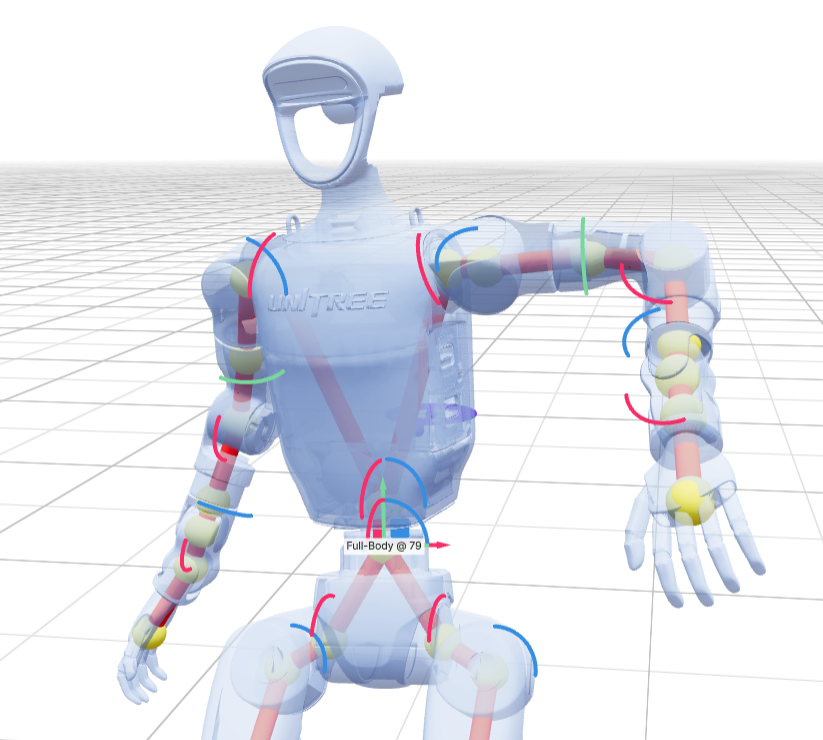
1.2.1 查看器
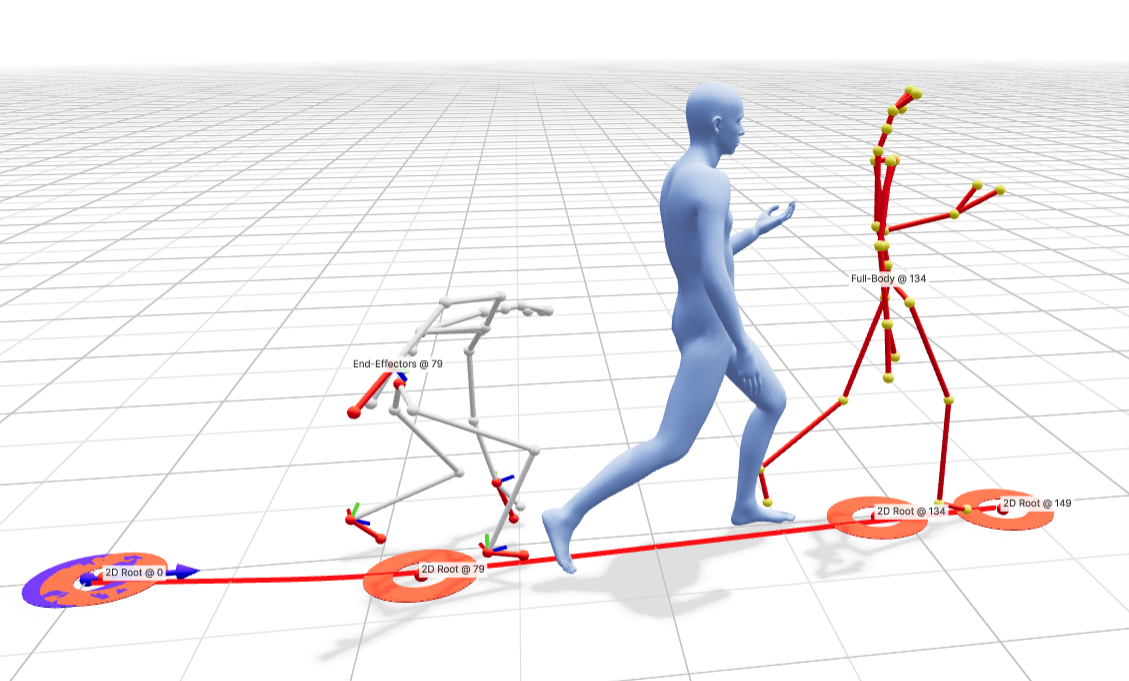
3D 查看器显示当前生成的运动。它支持骨骼或蒙皮网格渲染,相关设置可在“可视化”面板中进行配置。
1.2.1.1 摄像机
- 向左拖动:旋转
- 向右拖动:平移
- 滚动:缩放
1.2.1.2 播放
- 空格键播放/暂停
- ←/→ 逐帧播放,或点击帧号。
1.2.2 时间轴

时间轴是您:
- 添加、编辑和删除提示片段
- 在帧或时间间隔处添加和删除约束条件,并调整时间
1.2.2.1 时间轴导航
- 在时间轴上滚动上下:左右移动
- 按住 Shift 键并滚动时间轴:放大/缩小
1.2.2.2 提示
- 双击文本提示以编辑文本
- 点击并拖动提示框的右边缘以延长/缩短其时长(2-10 秒)
- 点击空白处以添加提示
- 右键点击提示以删除它
1.2.2.3 约束
在查看器中存在活动动作时,首次生成后可添加约束:
- 在时间轴轨道(全身/2D根等)上单击,以使用该帧的姿势添加该类型的约束条件
- 按住 Ctrl/Cmd 键并单击拖动以添加间隔约束,或将关键帧扩展为间隔
- 单击并拖动现有约束将其移动到其他帧
- 右键单击约束以删除它
- 要编辑约束:
- 将播放光标移至目标帧
- 在“设置”面板的“约束”选项卡中点击“进入编辑模式”。请注意,再次生成前必须退出编辑模式。
1.2.3 设置面板
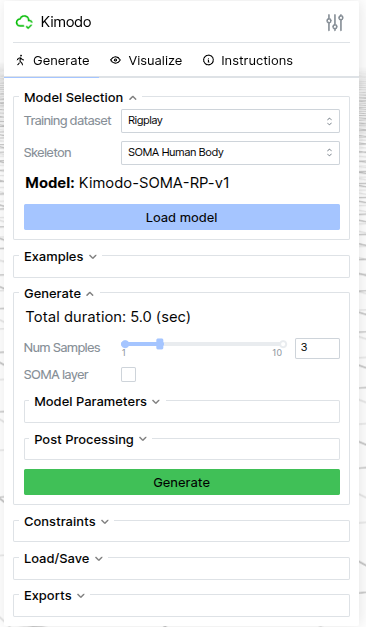
设置面板包含:
- 模型选择
- 加载示例
- 用于生成和后处理的模型参数选择
- 约束编辑参数
- 运动加载和保存
- 可视化选项
后续页面将分别对重要设置面板进行详细说明。
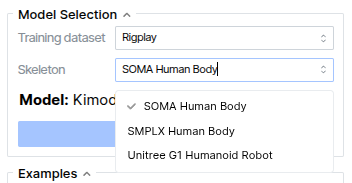
1.3 模型选择
模型选择功能允许您在快速入门指南中详细介绍的Kimodo模型之间进行选择。
这些模型决定了场景中加载的角色以及可用的导出选项。
- SOMA:默认人体骨骼
- G1:支持MuJoCo格式的导出
- SMPL-X:支持SMPL-X格式的输出
有关各骨骼的详细信息,请参阅“骨骼”部分。
1.4 示例
设置面板中的“示例”选项卡包含多个示例,这些示例突出了 Kimodo 的关键功能及其潜在的工作流程。其中包含了针对 Kimodo-SOMA-RP 和 Kimodo-G1-RP 模型的示例。
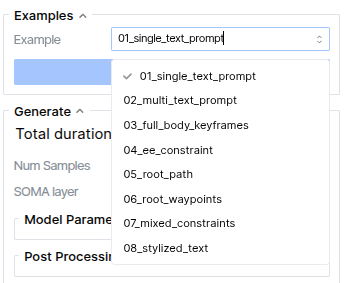
从下拉菜单中选择一个示例后,点击“加载示例”将示例配置加载到查看器中。
查看器将在时间轴上显示预生成的运动,以及用于生成该运动的提示和约束条件。用于生成模型的所有设置(例如初始值、无分类器引导设置)也会随示例一并加载,因此您只需在面板中点击“生成”即可恢复相同的结果。
这些示例涵盖了多种生成方式,包括使用一个或多个文本提示以及运动学约束进行生成。
保存新示例:生成动作后,您可以在“设置”面板的“加载/保存”选项卡下保存一个新示例。您应能立即看到“示例”下拉菜单更新为新保存的示例,以便日后加载。
本节将逐步介绍常见的工作流程以及如何使用该网络应用。每个工作流程都有独立的章节和配套视频。
1.5 生成
最重要的面板是“生成”面板,它允许您调用 Kimodo,根据提供的提示、约束和设置生成一个或多个动作。
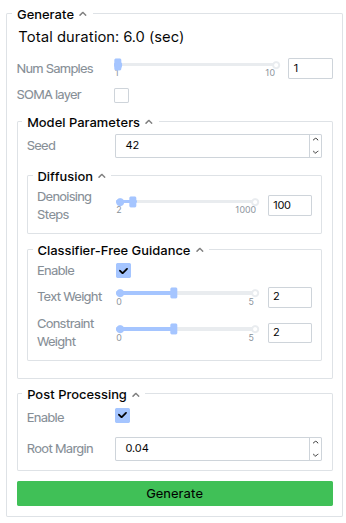
- 采样数量:根据当前设置生成的动作数量。当生成多个采样时,在编辑约束或生成新动作之前,必须通过在查看器中点击角色来选择其中一个采样。
- SOMA 层:若使用 Kimodo-SOMA 模型,此选项将显示。它允许您使用 SOMA 身体层为角色贴皮,而非使用 SOMA 骨骼系统。有关两者的区别,请参阅“骨骼”页面。
- 种子:用于可重复生成的随机种子
- 去噪步骤:DDIM 所使用的步骤数
- CFG 文本/约束权重:用于无分类器引导的权重值
- 后处理:是否使用脚部滑动清理和约束后优化来改善生成后的动作
- 根节点容差:如果骨骼根节点偏离约束的幅度超过此容差值,后处理将进行修正
1.6 约束条件
约束条件用于引导特定帧或时间间隔内的运动。如需了解各种约束类型的详细信息,请参阅“约束概念”和“约束格式”页面。
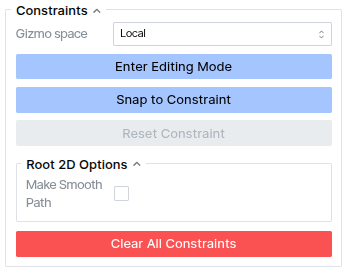
约束面板允许您配置约束和编辑设置:
- 进入编辑模式:在查看器中启用前向约束(FK)姿势编辑。可编辑的关节上将显示操作控件。如果当前帧的时间轴上已有约束,任何姿势编辑都会调整该约束;否则,您需要在调整姿势后在时间轴上添加约束。
- 操作控件空间:编辑时在本地或全局关节空间中显示旋转操作控件。
- 吸附到约束:将当前帧的运动吸附到该帧的约束上。当生成的姿势与约束不完全吻合,且您希望继续编辑约束时,此功能非常有用。
- 重置约束:执行相反操作,将姿势从受约束的姿势吸附回最初生成的运动。
- 根节点 2D 选项 > 生成平滑路径:若已设置根节点路径点约束,勾选此框将把路径点转换为平滑的密集路径约束。若运动的首帧和末帧没有路径点,系统将自动添加,因为 Kimodo 仅针对完整序列路径进行过训练。
- 清除所有约束:从查看器和时间轴中清除所有当前约束。
1.7 保存/加载
“加载/保存”和“导出”面板可用于保存生成的结果以及加载先前生成的结果
- 加载/保存
- 运动:将当前运动以 NPZ 格式保存到指定路径。也可通过此面板将运动 NPZ 文件加载到查看器中。此功能可用于加载通过命令行界面 (CLI) 生成的运动。
- 约束:将当前约束以 JSON 格式保存至指定路径。约束 JSON 文件也可加载到查看器中。
- 示例:允许保存包含当前运动、约束及所有设置的新示例。这对于重新加载先前的工作非常有用。如果示例保存到演示示例目录中,则可从“示例”下拉菜单加载;否则,您可通过此菜单中的文件路径加载。
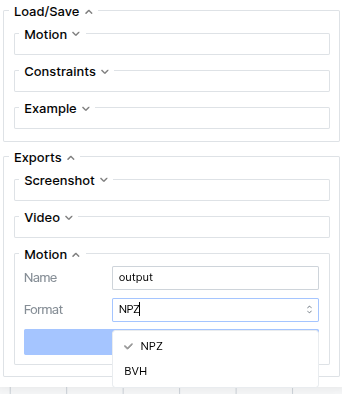
- 导出功能
- 截图:将当前画布保存为图像,可通过浏览器下载
- 视频:将当前运动录制为视频,可通过浏览器下载
- 运动数据:根据骨骼类型,将当前运动保存为指定格式。包括输出格式中所述的 NPZ、BVH、CSV 和 AMASS NPZ 格式。
二、命令行界面 (CLI)
CLI 的主要入口是 kimodo_gen 命令。该命令对应于位于 kimodo/scripts/generate.py 中的脚本,因此您也可以使用 python -m kimodo.scripts.generate 来实现相同的效果。
Docker 使用方法:如果您使用 Docker 部署 Kimodo,则可以在 Docker 容器内运行生成操作,将 `kimodo_gen XXX` 替换为 `docker compose run --rm demo kimodo_gen XXX`。如果您需要多次运行生成操作,建议先启动 demo 容器(例如在另一个终端或后台运行),然后在容器内执行命令,使用 `docker compose exec demo kimodo_gen XXX`。
单提示符生成:
kimodo_gen "A person walks forward." \
--model Kimodo-SOMA-RP-v1 \
--duration 5.0 \
--output output--model 命令对应用于生成的 Kimodo 模型检查点。如果未指定,默认使用 Kimodo-SOMA-RP-v1。生成的运动轨迹将使用 --output 指定的文件名,以 Kimodo 输出格式保存。若使用 G1 或 SMPL-X 模型进行生成,您还可以保存为其他输出格式,例如 MuJoCo qpos CSV 文件和 AMASS NPZ 格式。
多提示生成:
通过使用以句点分隔的多个句子(并附带相应的持续时间),可以实现基于文本提示序列的生成:
kimodo_gen "A person walks forward. A person is walking backwards." \
--duration "5.0 4.0" \此命令将使用 Kimodo 按顺序生成每个提示,并在第二个提示的开头添加约束条件,以确保与第一个生成的动作保持连续性。您可以通过 --num_transition_frames 参数控制用于混合连续动作的帧数。
带约束条件的单个提示:
可以通过提供一个约束条件 JSON 文件(参见《约束条件格式定义》)来对生成过程进行约束。
kimodo_gen "A person walks forward and picks something up from the ground." \
--model Kimodo-SOMA-RP-v1 \
--duration 5.0 \
--constraints kimodo/assets/demo/examples/kimodo-soma-rp/03_full_body_keyframes/constraints.json约束文件可通过交互式演示创建并保存,也可按照约束格式指南手动定义。
2.1 可视化生成的运动轨迹
使用命令行界面(CLI)生成的运动轨迹可在演示界面中进行可视化。操作方法如下:在“加载/保存” > “运动轨迹”下,输入生成的 npz 输出文件的路径,然后点击“加载运动轨迹”将其加载到查看器中。若生成时使用了约束,也可通过类似方式加载这些约束。
2.2 参数
要查看所有可用参数,请运行 kimodo_gen --help。参数包括:
- prompt:所需运动的文本描述(必填)
- --model:要使用的模型名称(默认:Kimodo-SOMA-RP-v1;选项为该表中的模型)
- --duration: 动作持续时间(单位:秒)(默认:5.0)。若包含多个提示,请将持续时间以空格分隔的形式作为字符串传入。
- --diffusion_steps: 去噪步骤数(默认:100)
- --num_samples: 要生成的动作变体数量(默认:1)
- --num_transition_frames:用于提示词之间过渡的帧数(默认:5)
- --constraints:包含约束条件的 JSON 文件路径
- --output:输出干名(默认:output)。适用于所有格式(NPZ、AMASS NPZ、CSV、BVH)。若仅有一个样本,则按格式分别生成单个文件(例如 test.npz、test.csv)。若有多个样本,则创建一个文件夹并在其中生成 test_00.npz、test_01.npz 等文件。对于仅含一个样本的 SMPLX,AMASS 数据将写入 stem_amass.npz,以免覆盖主 NPZ 文件。
- --bvh:可选标志。启用时,将使用与 --output 相同的文件名后缀导出 BVH(仅限 SOMA 模型)。
- --seed:用于确保结果可重现的种子值
- --no-postprocess:禁用后处理(包括足部滑动清理和约束优化)
- --input_folder:包含 meta.json 和可选 constraints.json 的文件夹。若设置此选项,生成设置将从 meta.json 加载。这些文件可在演示示例文件夹中找到。
2.3 Python API
如果您希望直接使用 Kimodo 的 Python API,建议从 kimodo/scripts/generate.py 脚本开始熟悉。完整的模型 API 详见 API 文档。
三、约束 JSON 格式
CLI 中的 --constraints 标志需要一个包含约束对象列表的 JSON 文件。查看演示中提供的示例是了解其格式最简单的方法。您可以在 kimodo/assets/demo/examples 中查看各种模型类型的示例。
提示:获取有效约束文件的最简单方法是在交互式演示中创建约束,然后点击“保存约束”。
3.1 总体结构
- 该文件是一个 JSON 数组:[{...}, {...}, ...]
- 每个元素都是一个对象,至少包含:
- type(字符串)
- root2d、fullbody、left-hand、right-hand、left-foot、right-foot、end-effector
- frame_indices(整数数组):生成片段中以 0 为起点的帧索引。
- type(字符串)
3.2 约束类型
根据类型不同,某些字段为必填项,某些为可选项。所有数值数组均为普通的嵌套 JSON 列表。在以下定义中,T 表示帧数,J 表示骨骼关节数。
3.2.1 root2d
该类型用于捕获 2D 根节点路点和 2D 根路径。它需要:
- smooth_root_2d(数组形状 [T, 2]):在给定 frame_indices 帧号处,地面平面上经过平滑处理的根节点位置 [x, z]。
以及可选参数:
- global_root_heading(数组形状 [T, 2]):在给定 frame_indices 帧号处,根节点的全局航向 [cos, sin]。
3.2.2 fullbody
此参数捕获关节位置上的全身关键帧约束。其包含:
- local_joints_rot(数组形状 [T, J, 3]):每帧每个关节的轴-角局部旋转(弧度)。受约束的关节位置将由此推导得出。
- root_positions (数组形状 [T, 3]):根部(髋部)平移 [x, y, z]。
- smooth_root_2d (可选;数组 [T, 2]):平滑后的根部位置 [x, z]。若省略,则默认取自 root_positions 的 [x, z] 分量。
3.2.3 左手 / 右手 / 左脚 / 右脚
捕获针对手/脚关节位置和旋转的末端执行器约束。
这些使用与 fullbody 相同的字段。但在底层实现中,它们仅会影响相应的末端执行器和髋关节。
3.3 最小示例
[
{
"type": "root2d",
"frame_indices": [0, 30, 60],
"smooth_root_2d": [[0.0, 0.0], [0.5, 0.0], [1.0, 0.1]]
}
]四、输出格式
命令行生成使用单一输出根目录(--output)来存储所有格式(NPZ、AMASS NPZ、CSV 和 BVH)。根据样本数量的不同,它可以写入单个文件或一组文件:
- 单个样本(--num_samples 1):在输出路径下为每种格式生成一个文件(例如 --output test → test.npz, test.csv)。不创建文件夹。对于 SMPLX,AMASS 格式将写入 test_amass.npz。
- 多个样本:创建一个以该主文件名命名的文件夹,并为每个样本生成一个文件,文件名后缀为 _00、_01 等(例如:--output my_run → my_run/my_run_00.npz, my_run/amass_00.npz, …)。
使用 --bvh 标志可同时将 BVH(仅限 SOMA)导出到同一主文件中。
4.1 Kimodo NPZ 格式
生成的运动数据以 NPZ 文件形式存储(每个样本一个文件,例如 motion_00.npz),包含:
- posed_joints:全局关节位置 [T, J, 3]
- global_rot_mats:全局关节旋转矩阵 [T, J, 3, 3]
- local_rot_mats:局部(相对于父关节)关节旋转矩阵 [T, J, 3, 3]
- foot_contacts:脚部接触标签 [左脚跟、左脚趾、右脚跟、右脚趾] [T, 4]
- smooth_root_pos:模型输出的平滑根关节表示 [T, 3]
- root_positions:实际根关节(如骨盆)的(未平滑)轨迹 [T, 3]
- global_root_heading:模型输出的根关节航向 [T, 2]
其中:
- T:帧数
- J:关节数
若生成多个样本,文件将以 _00、_01 等后缀保存。
4.2 Kimodo-G1 的 CSV 格式
在使用 Kimodo-G1 模型并通过 CLI 生成时,若指定 --output 参数,导出器会将 MuJoCo qpos 数据写入 CSV 文件。每行对应运动中的一个姿态,包含 36 个值:
- 根节点平移 [x, y, z]
- 根节点旋转四元数 [w, x, y, z]
- 29 个关节的 1-DoF 值(按 G1 关节顺序排列)
该 CSV 采用 MuJoCo 坐标系(z 轴向上,+x 轴向前)。若生成多个样本,文件将以 _00、_01 等后缀保存。
4.3 适用于 Kimodo-SMPLX 的 AMASS NPZ 格式
当使用 Kimodo-SMPLX-RP 模型且 --output 参数指定为 CLI 生成时,导出器将写入一个 AMASS 风格的 SMPL-X .npz 文件。键包括:
- trans: 根节点平移 [T, 3]
- root_orient: 根节点方向(轴-角)[T, 3]
- pose_body: 身体姿态(轴-角)[T, 63](21 个关节 × 3)
- pose_hand: 手部姿态(轴-角)[T, 90](15 个关节 × 2 只手 × 3)
- pose_jaw:下颌姿态轴角 [T, 3]
- pose_eye:眼部姿态轴角 [T, 6]
- betas:形状系数
- num_betas:形状系数数量
- gender:中性
- surface_model_type:smplx
- mocap_frame_rate:帧率 (fps)
- mocap_time_length: 动作持续时间(秒)
导出器将 Kimodo 坐标系(y 轴向上,+z 轴向前)转换为 AMASS 坐标系(z 轴向上,+y 轴向前)。如果生成了多个样本,文件将以 _00、_01 等后缀保存。
五、生成参数
在演示界面和低级 Python API 中,Kimodo 支持对动作生成进行一些高级配置。
5.1 无分类器引导
控制文本和约束引导的强度:
output = model(
prompt="A person jumps",
num_frames=150,
cfg_weight=[2.0, 2.0], # [text_weight, constraint_weight]
cfg_type="separated", # Options: "nocfg", "regular", "separated"
num_denoising_steps=100,
)当遵循提示与满足约束之间存在权衡时,这些选项会很有帮助。
CFG 选项包括:
- cfg_type="nocfg": 不提供引导(速度更快,可控性较低)
- cfg_type="regular": “标准”无分类器引导
- 公式:out_uncond + w * (out_text_and_constraint - out_uncond)
- cfg_type="separated":文本和约束采用独立权重
- 公式:out_uncond + w_text * (out_text - out_uncond) + w_constraint * (out_constraint - out_uncond)
5.2 去噪步骤
DDIM采样中使用的去噪步骤数量可用于控制速度与质量之间的权衡:
- 步骤较少(50-100):推理速度更快,质量略低
- 步骤较多(100-200):质量更高,推理速度较慢

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐
 7
7 0
0- 0



 已为社区贡献6条内容
已为社区贡献6条内容

所有评论(0)