【卡尔曼滤波】第2章 非线性扩展与高级变体
·
目录
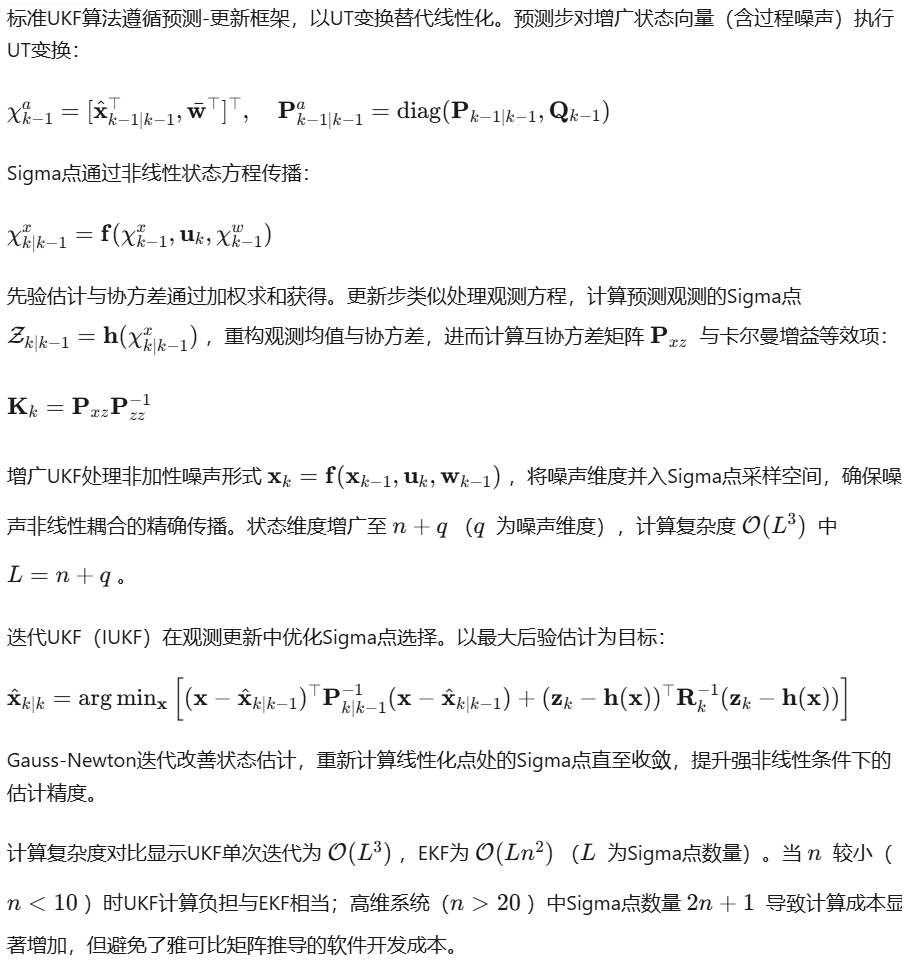
2.2.1 Unscented Transform(UT变换)
2.3.1 信息滤波器(Information Filter)
第2章 非线性扩展与高级变体
实际工程系统普遍呈现非线性动态特性,标准卡尔曼滤波的线性假设面临根本性挑战。针对非线性状态估计问题,扩展卡尔曼滤波器通过局部线性化逼近系统动态,无迹卡尔曼滤波器则采用确定性采样策略捕获非线性变换的统计特性。信息滤波框架重构估计问题的对偶表示,多模型方法处理系统模式的不确定性。本章系统阐述非线性估计理论的核心方法及其数值实现。
sandbox:///mnt/kimi/output/chapter2_figures.png
2.1 扩展卡尔曼滤波(EKF)
2.1.1 非线性系统线性化
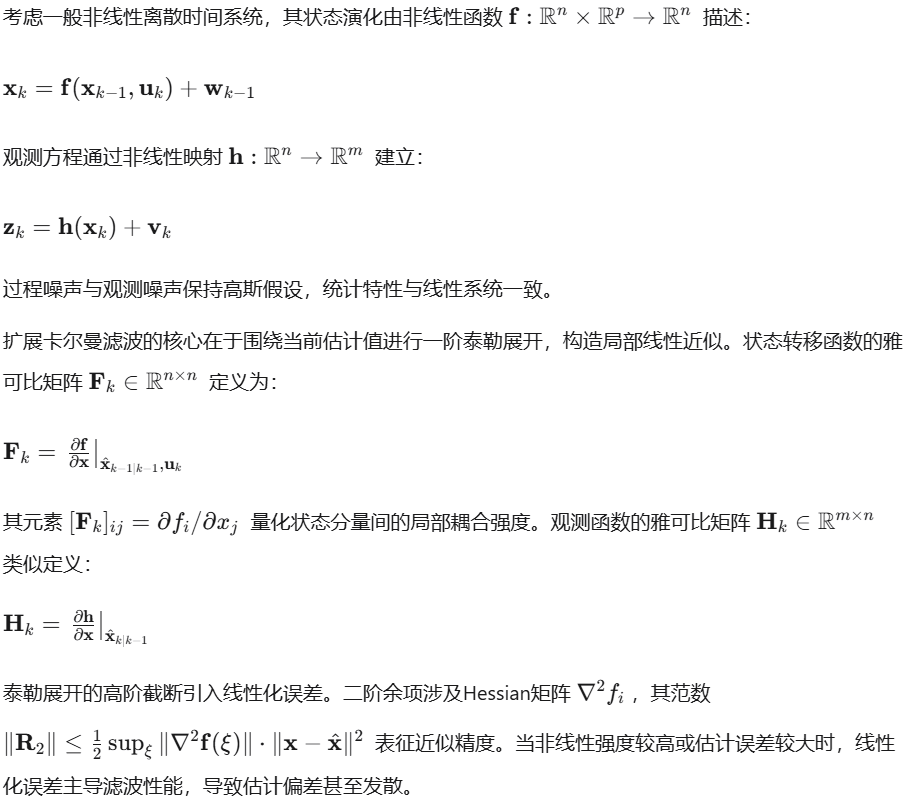
2.1.2 EKF算法实现
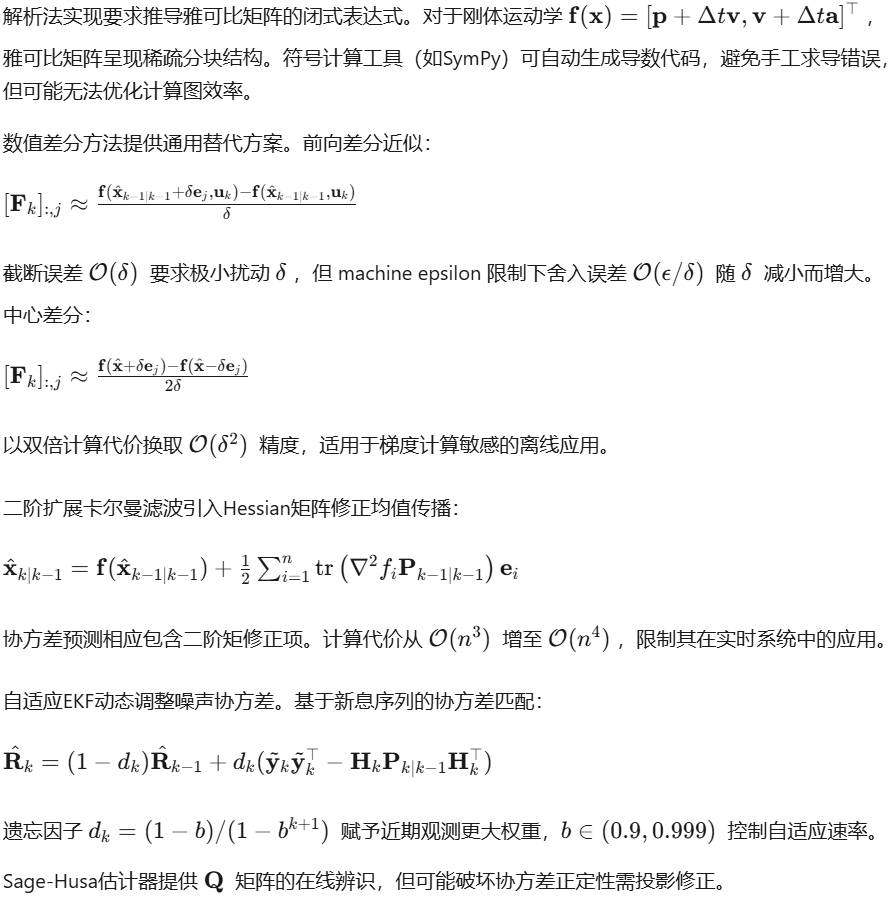
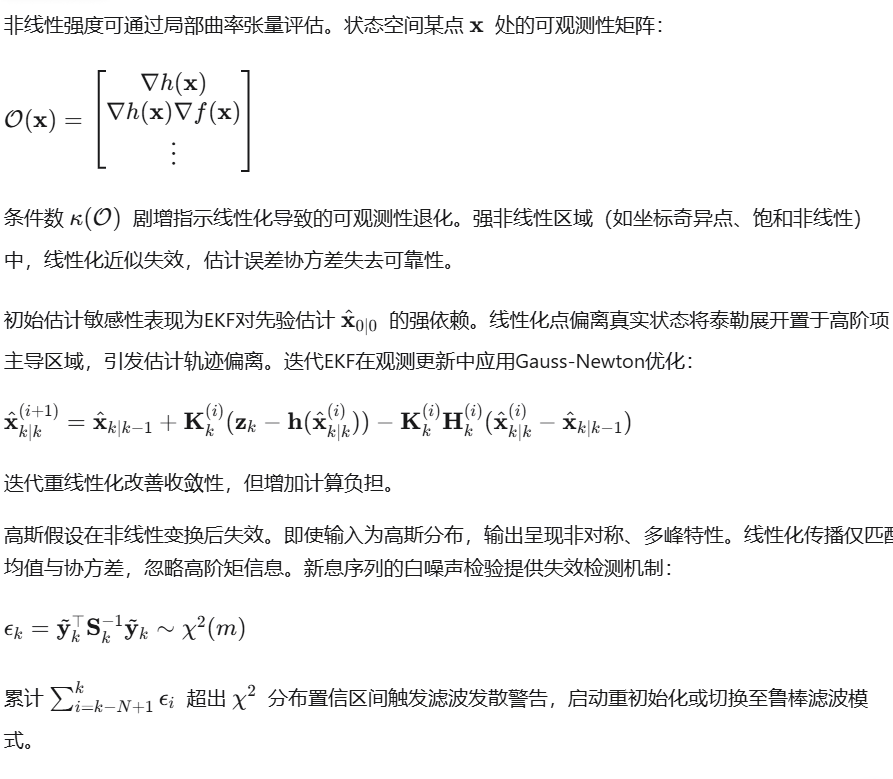
2.1.3 EKF局限性分析
2.2 无迹卡尔曼滤波(UKF)
2.2.1 Unscented Transform(UT变换)
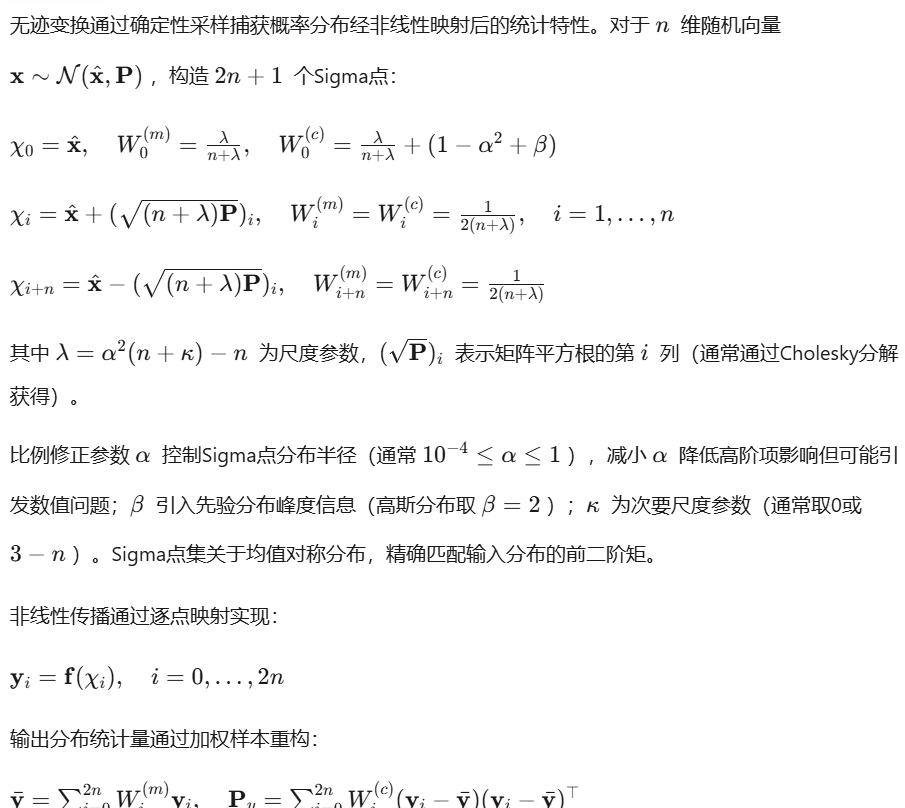
2.2.2 UKF算法实现
2.2.3 高阶UT变换与变体
高阶无迹变换通过扩展Sigma点集匹配更高阶矩。五阶矩匹配采用 个点,或利用Richardson外推结合不同尺度参数的UT结果,提升偏度与峰度估计精度,适用于非高斯分布传播。
球面单纯形Sigma点集将采样点减至 n+2 个,保持最小样本量的二阶矩匹配。单纯形顶点位于超球面,通过优化算法确定权重分配,降低高维UKF计算负担,但牺牲对称性可能引入估计偏差。
自适应Sigma点策略根据局部线性度动态调整采样密度。估计非线性强度指标:
超过阈值时增加Sigma点数量或采用分层采样,平衡精度与效率。
约束UKF处理状态空间边界(如正交性约束、不等式约束)。通过投影修正将违规Sigma点映射至可行域,或采用约束优化求解加权均值,确保估计状态满足物理可行性。
2.3 信息滤波与多模型方法
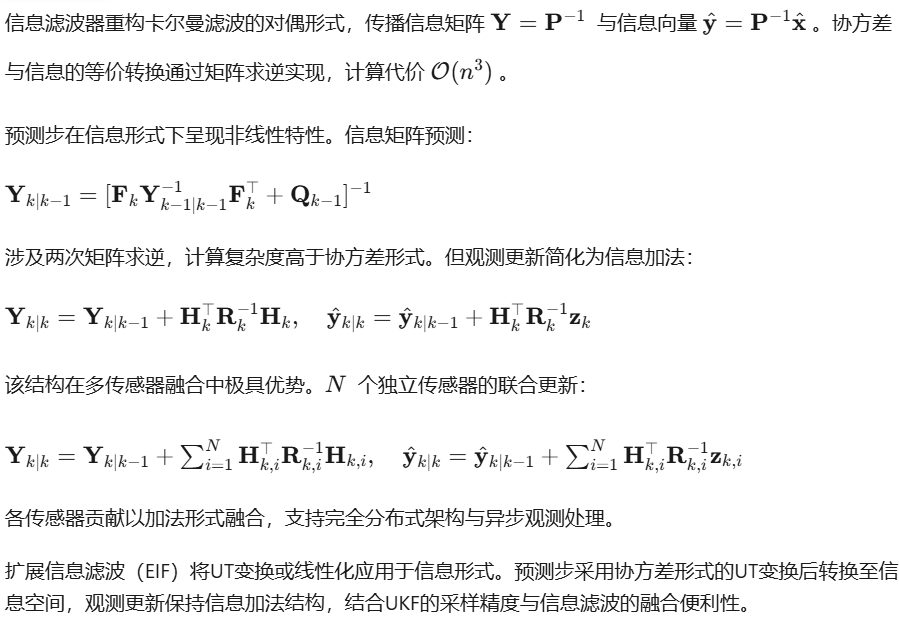
2.3.1 信息滤波器(Information Filter)
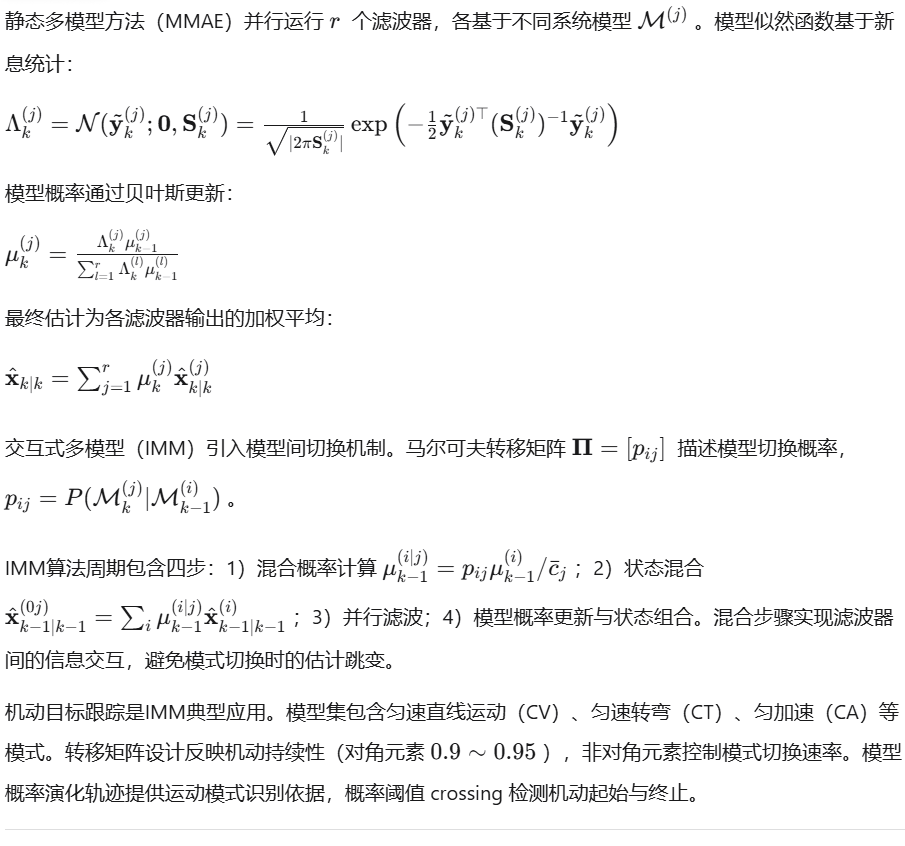
2.3.2 多模型估计(MMAE/IMM)

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐


 9
9 0
0- 0



 已为社区贡献15条内容
已为社区贡献15条内容

所有评论(0)