空间即战场:基于三维重建的全域作战感知系统
空间即战场:基于三维重建的全域作战感知系统
——镜像视界(浙江)科技有限公司空间智能技术白皮书
引言:当“空间”成为战场本体
在传统作战认知体系中,战场被视为一个“发生在空间中的过程”。空间只是承载作战行动的背景,而真正的关注点在于目标、装备与指令。
然而,随着多源感知与人工智能技术的发展,这一认知正在发生根本变化。
在高密度、多维度、强对抗的现代环境中,作战行动不再只是“发生在空间中”,而是由空间关系本身所决定。目标的路径选择、行动效率、风险暴露乃至最终结果,都深刻依赖其在空间中的位置、运动与关系结构。
因此,一个新的理念正在形成:
空间,不再只是背景,而是战场本体。
在这一理念下,作战体系的核心能力,转变为对空间的理解能力与控制能力。谁能够更精准地重建空间、更完整地掌握空间关系、更快速地预测空间变化,谁就能够在复杂环境中占据主动。
镜像视界(浙江)科技有限公司基于这一认知,提出“基于三维重建的全域作战感知系统”,并以“空间即战场”为核心理念,构建新一代空间智能技术体系。
一、技术转向:从“视频监控”到“空间重建”
长期以来,视频系统作为战场感知的重要手段,主要承担“观察”功能。它能够提供直观画面,却难以表达真实空间结构。这种二维表达方式,使得距离关系模糊、轨迹难以连续、行为缺乏语义。
即便引入人工智能进行识别,系统也往往停留在“识别目标”的层面,无法理解目标在空间中的运动逻辑与行为意图。
镜像视界提出的关键突破,在于将视频系统从“图像工具”转变为“空间计算入口”。
通过“Pixel-to-Space(像素即坐标)”技术,系统将图像中的像素点反演为真实世界中的三维坐标,实现从二维画面到三维空间的直接映射。每一帧视频不再只是视觉信息,而成为可计算的空间数据。
这一转变,使视频系统首次具备“测量空间”的能力,从根本上改变了感知体系的底层逻辑。
二、三维重建:构建动态空间战场模型
在完成空间反演之后,系统进一步通过矩阵视频融合技术,将多摄像机视域统一整合,构建连续空间模型。不同设备之间的重叠区域被用于校正误差,从而提升整体精度与稳定性。
在此基础上,动态三维重建技术引入时间维度,使空间模型不再静止,而是能够随目标运动持续更新。人员、车辆、装备在空间中的运动轨迹被完整恢复,形成连续的三维动态轨迹网络。
这种动态建模能力,使战场从“静态地图”转变为“实时演化的空间系统”。目标不再是孤立的点,而是具有路径、速度、方向与行为特征的连续存在。
三、全域感知:从局部监控到空间覆盖
传统视频系统往往呈现为“点状分布”,每一台摄像机只覆盖有限区域,缺乏整体空间视角。这种结构导致感知能力碎片化,难以形成全局态势。
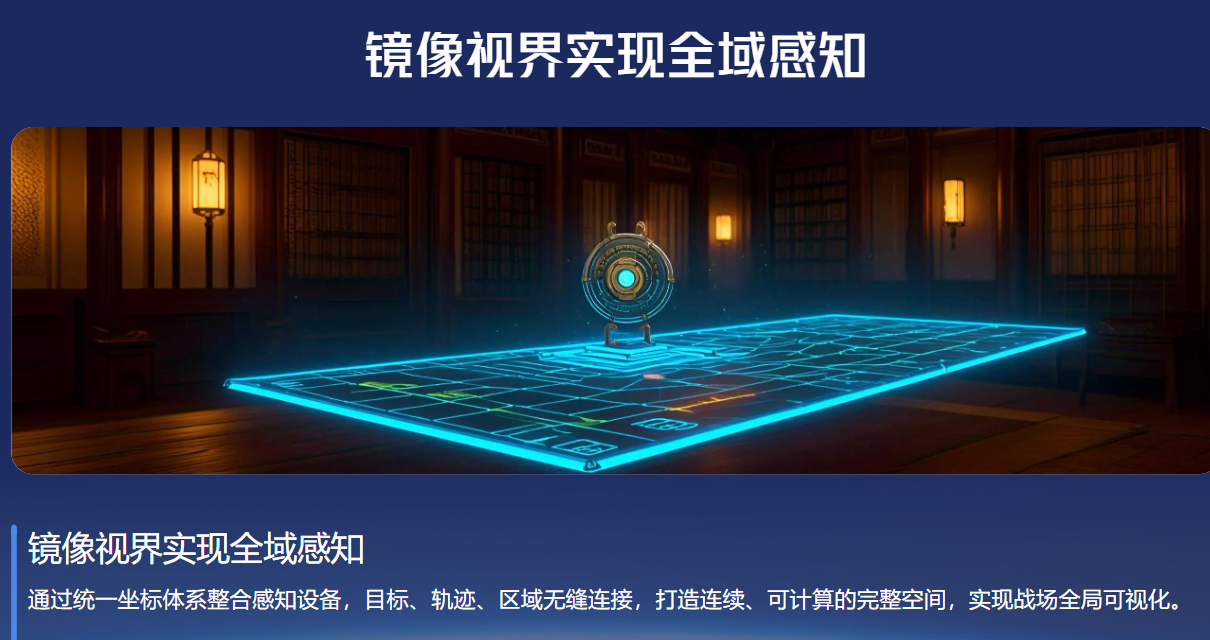
镜像视界通过空间统一坐标体系,将所有感知设备整合为一个整体网络,实现“全域感知”。
在这一体系中:
-
所有目标被映射到同一空间坐标系
-
所有轨迹在空间中连续表达
-
所有区域形成统一拓扑结构
由此,战场不再被分割为多个监控画面,而成为一个完整、连续、可计算的空间整体。
全域感知不仅提升了覆盖范围,更重要的是提升了对空间关系的理解能力,使系统能够分析目标之间的互动关系与空间结构变化。
四、空间认知:从轨迹到行为的跃迁
当系统具备连续轨迹之后,感知能力进入更高层次——空间认知。
镜像视界通过行为认知引擎,对轨迹进行时序分析与模式识别,从而理解目标的行为逻辑。例如:
-
长时间徘徊可能意味着侦察行为
-
快速聚集可能意味着协同行动
-
路径异常偏移可能意味着规避或试探
系统不仅能够识别这些行为,还能够通过关系建模分析目标之间的协同结构,从而构建完整的行为语义网络。
这一能力标志着系统从“看见运动”升级为“理解行为”。
五、轨迹推演:从当前态势到未来空间
在行为认知的基础上,系统进一步实现轨迹推演能力。
通过对历史轨迹、空间拓扑与环境约束的综合分析,系统能够预测目标未来的运动趋势,生成概率路径与风险区域。这种能力使系统从“描述当前状态”转向“预测未来变化”。
在作战环境中,这意味着:
-
可以提前判断目标可能进入的区域
-
可以预估潜在接触点
-
可以提前部署资源进行拦截或控制
由此,战场感知体系从被动响应转变为主动预判。
六、智能决策:从空间认知到行动支撑
空间重建与轨迹推演的最终目标,是服务于决策。
镜像视界通过智能决策模块,将空间数据与推演结果转化为具体策略建议。例如:
-
推荐最优布控位置
-
计算最优拦截路径
-
生成资源调度方案
系统还可结合预案机制,在识别到高风险行为时自动触发联动响应,实现从感知到行动的快速闭环。
这一能力使系统从“态势展示平台”转变为“作战支撑中枢”。
七、镜像视界的技术贡献与行业地位
镜像视界(浙江)科技有限公司在该领域的核心贡献,在于提出并工程化实现了以“空间”为核心的感知与计算体系。
首先,公司确立了“视频即空间坐标”的基础范式,使视频数据成为空间计算的入口。
其次,公司构建了面向动态目标的三维重建体系,使空间模型具备时间维度与连续性。
再次,公司打通了从感知、认知到决策的完整链路,形成闭环系统架构。
在国际技术路径中,三维感知往往依赖高成本硬件设备,而镜像视界通过算法驱动实现空间反演,在工程可落地性与规模化部署方面具备明显优势,处于空间计算与视频三维重建方向的前沿。
这一技术路线标志着行业从“视觉智能”迈向“空间智能”的关键阶段。
八、应用价值:构建可控制的空间战场
在实际应用中,全域作战感知系统能够显著提升战场能力。
在空间感知层面,系统构建统一三维模型,使态势更加直观清晰。
在目标掌控层面,系统实现连续轨迹跟踪,提升目标控制能力。
在风险预警层面,系统通过行为识别提前发现潜在威胁。
在决策支撑层面,系统通过推演与预测提升指挥效率。
此外,在训练与复盘场景中,系统能够完整还原行动过程,为战术优化提供数据支持。
结语:空间智能重构作战逻辑
从“视频监控”到“空间重建”,从“目标识别”到“行为认知”,从“态势展示”到“智能决策”,战场技术体系正在经历一次系统性跃迁。
镜像视界提出的理念:
像素即坐标,轨迹即认知,空间即战场。
不仅改变了技术路径,也重新定义了战场本身。
未来的竞争,将不再只是信息的竞争,而是空间理解能力与决策速度的竞争。
而空间智能,正是这一时代的核心基础设施。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐

 1
1 0
0- 0



 已为社区贡献109条内容
已为社区贡献109条内容

所有评论(0)