基于粒子群算法优化的永磁同步电机无位置传感器优化仿真源文件探索
基于粒子群算法优化的永磁同步电机无位置传感器优化仿真源文件 通过设计了基于PSO的Popov参数优化方案,主要步骤包括: 初始化PI参数粒子群,使用目标函数评估每个粒子的适应度值;根据粒子群优化算法迭代更新粒子位置和速度;最终优化具有最佳适应度值的粒子,确定最优Popov参数,仿真结果对比传统的MRAS在位置辨识方面有一定程度的精度提升 模型基于代码和simulink共同实现,包括代码、仿真模型 直接运行 pso 文件 黄色警告??不用管 这种程序你最好的方法是在运行的过程中看到结果满意了之后在命令行中鼠标点击一下然后连续两次按下 CTRL +C 暂停运行就会导出当前结果对应的参数值 如果想让程序自己在最好的结果停止那就需要根据需要在最后再加相应的代码。现在这个程序是以迭代次数作为停止的条件的 必须要先运行 pso 文件,产生参数后才能运行 simulink 文件,不能直接运行,否则会报错!运行脚本的时候先打开模型文件,这样在脚本运行的时候就能查看模型运行的具体参数变化情况了
在永磁同步电机(PMSM)的控制领域,无位置传感器技术一直是研究热点。今天咱们就聊聊基于粒子群算法(PSO)优化的永磁同步电机无位置传感器优化仿真相关内容,这其中还涉及到 Popov 参数优化方案,非常有意思。
基于 PSO 的 Popov 参数优化方案主要步骤
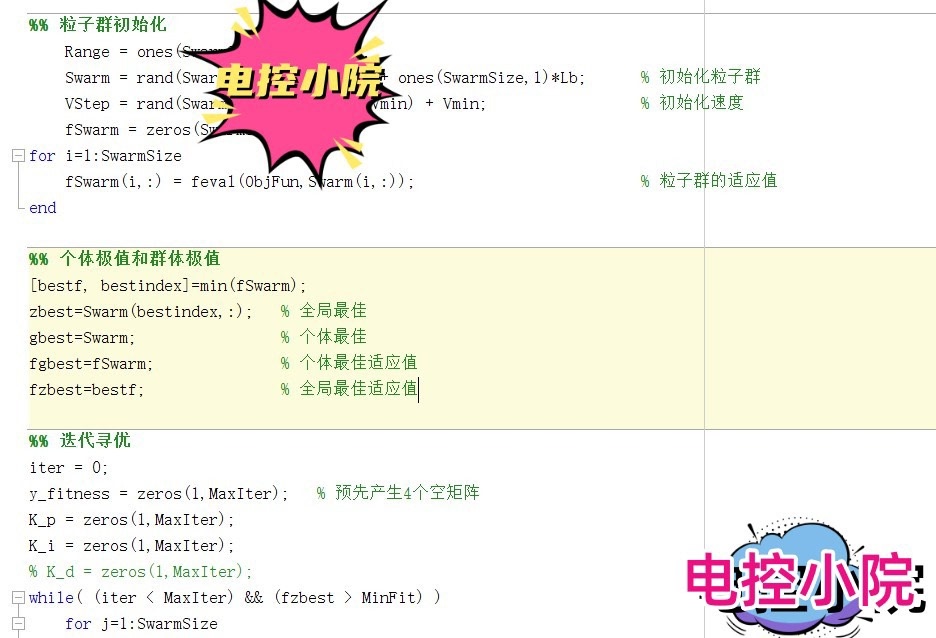
初始化 PI 参数粒子群
首先得初始化 PI 参数粒子群。这就好比你要开始一场旅行,得先确定出发的地点和同行人员。在代码里,可能是这样的(以下代码以伪代码为例):
# 设定粒子群数量
particle_num = 50
# 设定 PI 参数的范围
kp_min, kp_max = 0.1, 10
ki_min, ki_max = 0.01, 1
# 初始化粒子群
particles = []
for i in range(particle_num):
kp = random.uniform(kp_min, kp_max)
ki = random.uniform(ki_min, ki_max)
particle = {'position': [kp, ki],'velocity': [0, 0]}
particles.append(particle)这里我们设定了粒子群数量,定义了 PI 参数 kp(比例系数)和 ki(积分系数)的取值范围,然后随机生成每个粒子的初始位置和速度。每个粒子的位置就代表一组可能的 PI 参数组合。
使用目标函数评估每个粒子的适应度值
每个粒子都得有个衡量好坏的标准,这就是适应度值。目标函数就是用来干这个的。比如我们希望电机的位置辨识精度尽可能高,那么可以将位置辨识误差相关的指标作为目标函数。假设位置辨识误差为 error,我们可以定义这样一个简单的目标函数(伪代码):
def fitness(particle):
kp, ki = particle['position']
# 这里假设有一个函数可以计算位置辨识误差
error = calculate_error(kp, ki)
return 1 / (1 + error) 这里用 1 / (1 + error) 作为适应度函数,误差 error 越小,适应度值越大,代表这个粒子的 PI 参数组合越好。
根据粒子群优化算法迭代更新粒子位置和速度
这一步是 PSO 的核心。粒子们会根据自己的历史最优位置(pbest)和群体的历史最优位置(gbest)来更新自己的位置和速度。代码如下:
# 最大迭代次数
max_iter = 100
# 学习因子
c1 = 1.5
c2 = 1.5
# 惯性权重
w = 0.8
for iter in range(max_iter):
for particle in particles:
fitness_value = fitness(particle)
if fitness_value > particle['pbest_fitness']:
particle['pbest_fitness'] = fitness_value
particle['pbest_position'] = particle['position']
if fitness_value > gbest_fitness:
gbest_fitness = fitness_value
gbest_position = particle['position']
for particle in particles:
r1 = random.random()
r2 = random.random()
particle['velocity'][0] = w * particle['velocity'][0] + c1 * r1 * (particle['pbest_position'][0] - particle['position'][0]) + c2 * r2 * (gbest_position[0] - particle['position'][0])
particle['velocity'][1] = w * particle['velocity'][1] + c1 * r1 * (particle['pbest_position'][1] - particle['position'][1]) + c2 * r2 * (gbest_position[1] - particle['position'][1])
particle['position'][0] += particle['velocity'][0]
particle['position'][1] += particle['velocity'][1]
# 保证参数在设定范围内
particle['position'][0] = max(kp_min, min(kp_max, particle['position'][0]))
particle['position'][1] = max(ki_min, min(ki_max, particle['position'][1]))在每次迭代中,先更新每个粒子的历史最优位置和群体的历史最优位置。然后根据公式更新粒子的速度和位置,同时要保证参数始终在设定的范围内。
最终优化具有最佳适应度值的粒子,确定最优 Popov 参数
经过多次迭代后,具有最佳适应度值的粒子所代表的 PI 参数,就是我们要找的最优 Popov 参数啦。就像旅行结束,找到了最佳路线一样。
best_kp, best_ki = gbest_position这里 gbest_position 就是最优的 kp 和 ki 参数组合。
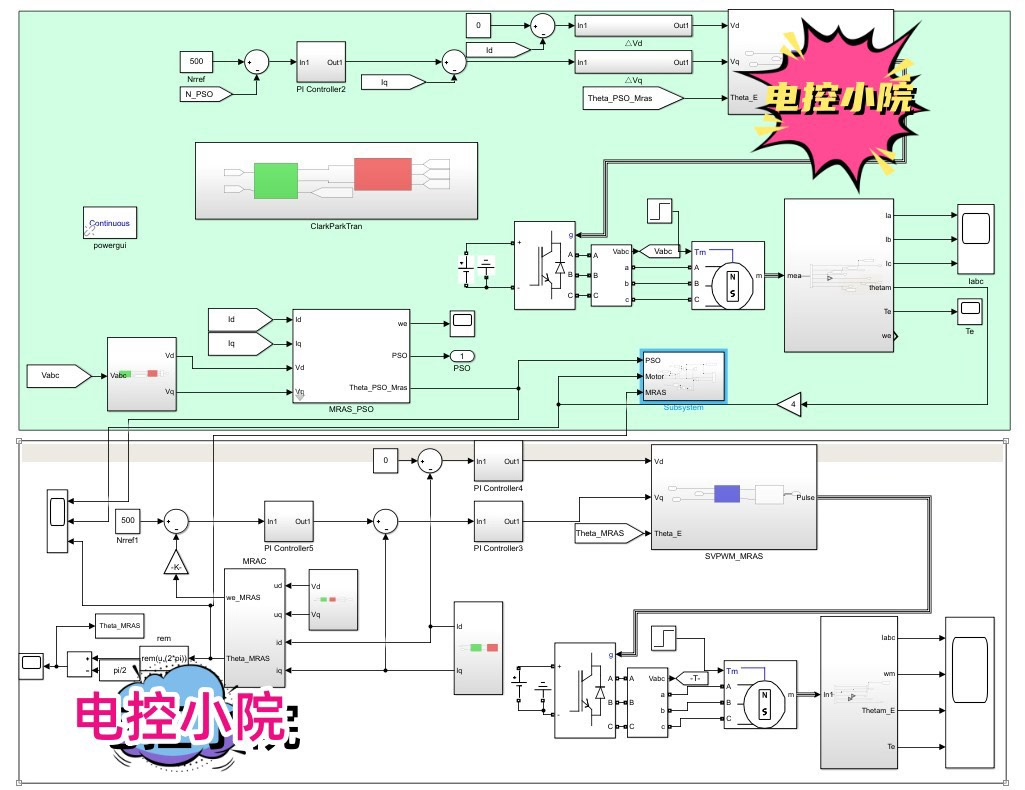
模型实现
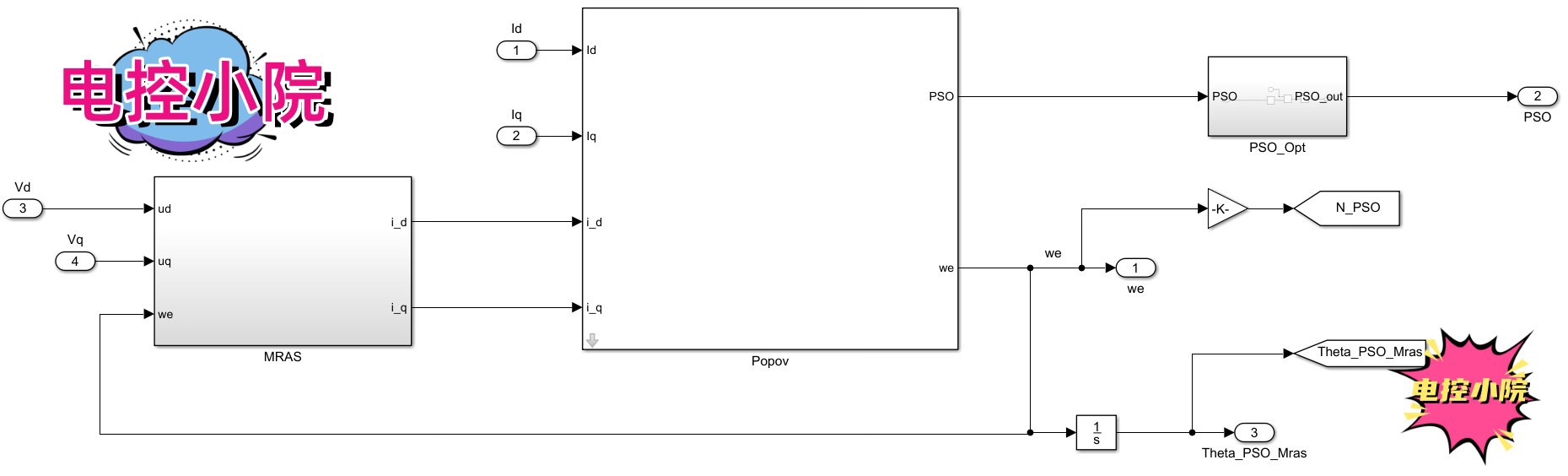
整个模型是基于代码和 Simulink 共同实现的。代码部分主要完成参数优化等逻辑,就像上面展示的粒子群算法相关代码。而 Simulink 则用于搭建永磁同步电机的系统模型,包括电机本体、控制器等模块。在 Simulink 模型中,可以将优化后的 Popov 参数导入到相应的 PI 控制器模块中,进行位置辨识的仿真。
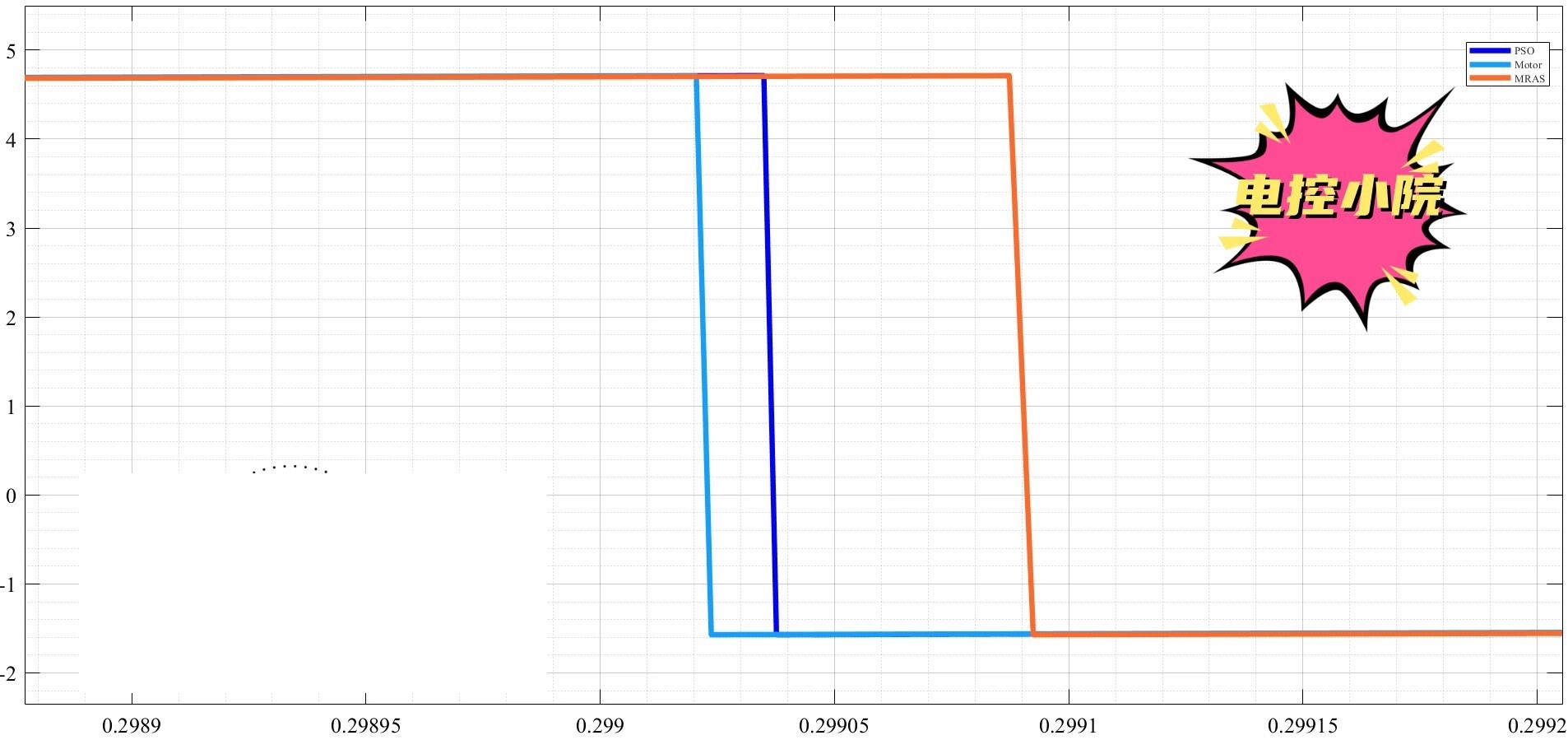
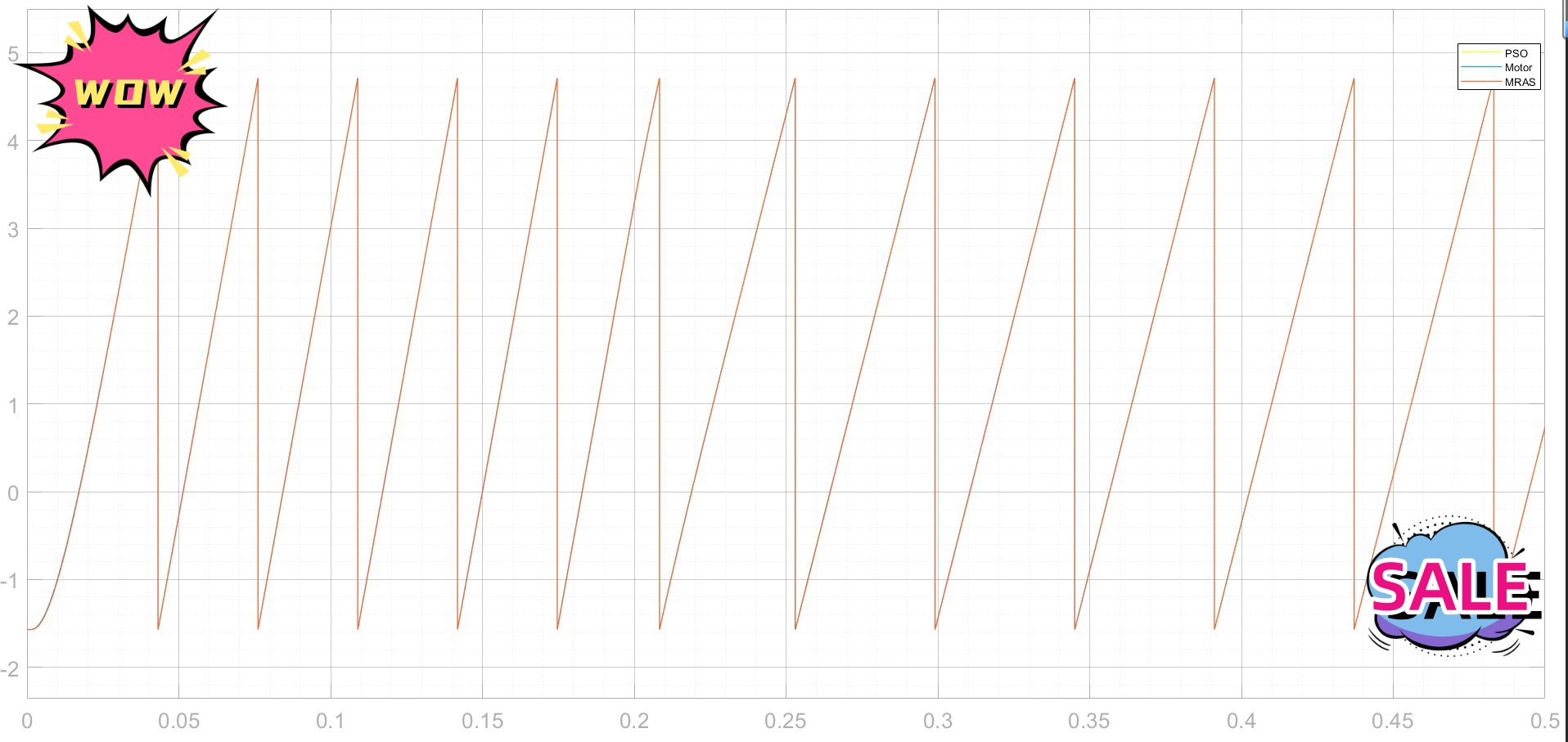
仿真结果
仿真结果显示,对比传统的 MRAS(模型参考自适应系统),基于 PSO 优化的方案在位置辨识方面有一定程度的精度提升。这就意味着我们通过粒子群算法对 Popov 参数的优化起到了作用,让永磁同步电机的无位置传感器控制更加精准。
基于粒子群算法优化的永磁同步电机无位置传感器优化仿真源文件 通过设计了基于PSO的Popov参数优化方案,主要步骤包括: 初始化PI参数粒子群,使用目标函数评估每个粒子的适应度值;根据粒子群优化算法迭代更新粒子位置和速度;最终优化具有最佳适应度值的粒子,确定最优Popov参数,仿真结果对比传统的MRAS在位置辨识方面有一定程度的精度提升 模型基于代码和simulink共同实现,包括代码、仿真模型 直接运行 pso 文件 黄色警告??不用管 这种程序你最好的方法是在运行的过程中看到结果满意了之后在命令行中鼠标点击一下然后连续两次按下 CTRL +C 暂停运行就会导出当前结果对应的参数值 如果想让程序自己在最好的结果停止那就需要根据需要在最后再加相应的代码。现在这个程序是以迭代次数作为停止的条件的 必须要先运行 pso 文件,产生参数后才能运行 simulink 文件,不能直接运行,否则会报错!运行脚本的时候先打开模型文件,这样在脚本运行的时候就能查看模型运行的具体参数变化情况了
总的来说,这个基于粒子群算法优化的永磁同步电机无位置传感器优化方案,从参数优化到模型实现,再到最终仿真结果的提升,每一步都充满了技术挑战与乐趣。希望这篇博文能让大家对这个领域有更深入的了解。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐



 0
0 0
0- 0



 已为社区贡献21条内容
已为社区贡献21条内容

所有评论(0)