五相永磁同步电机矢量控制的Matlab Simulink仿真之旅
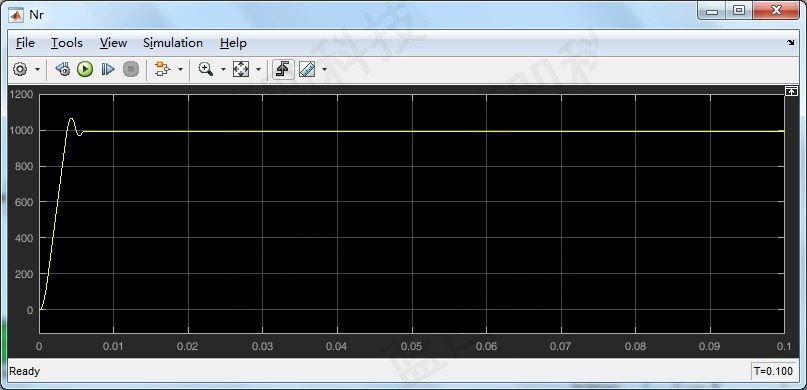
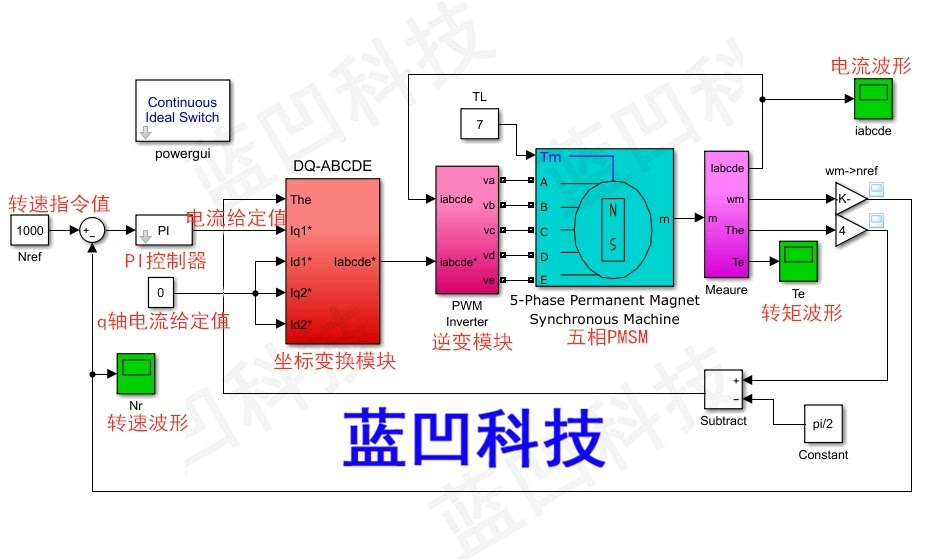
PMSM 五相永磁同步电机的矢量控制 matlab simu link 仿真模型 (1)该模型采用 matlab/simulink 2016b 版本搭建,使用matlab 2016b及以上版本打开最佳 (2)该模型已经代为转换到各个常用版本 【算法介绍】 (1)仿真模型由直流源、逆变电源模块、五相永磁同步电机(PMSM)、坐标变换模块、PI控制器模块、测量模块等构成; (2)采用转速、电流双闭环控制; (3)转速外环采用PI控制器;电流内环采用滞环控制器; (4)基于dq坐标系下的矢量控制策略; (5)转速跟踪性能良好,具有较好的抗负载扰动性能 【简要技术说明文档和参考文献】
最近在研究电机控制相关内容,今天来和大家分享一下五相永磁同步电机(PMSM)矢量控制的Matlab Simulink仿真模型。这个模型可是很有意思的,它基于Matlab/Simulink 2016b版本搭建,要是用2016b及以上版本打开那是再好不过啦。而且作者超贴心,已经帮我们把模型转换到各个常用版本了,完全不用担心版本兼容性问题。
模型构成模块解析
咱们先来看看这个仿真模型的构成,它就像一个精心搭建的小世界,由好几个关键模块组成。
- 直流源:这是整个系统的能量源头,为后续的逆变电源模块提供稳定的直流输入。就好比是给整个“小世界”注入动力的源泉,让一切得以运转。
- 逆变电源模块:它可是个关键角色,能把直流源提供的直流电转换成交流电,为五相永磁同步电机供电。在Simulink里,这一模块的参数设置十分重要,例如开关频率、调制方式等,都对最终的电机运行性能有着很大影响。简单来说,它就像一个神奇的“魔法师”,把直流电巧妙地“变”成适合电机运行的交流电。
- 五相永磁同步电机(PMSM):作为整个系统的核心输出部分,它接收逆变电源模块送来的交流电,从而产生机械运动。电机的参数,像定子电阻、电感、永磁体磁链等,决定了电机的基本特性。在Matlab里,我们可以通过修改这些参数来模拟不同特性的五相永磁同步电机。
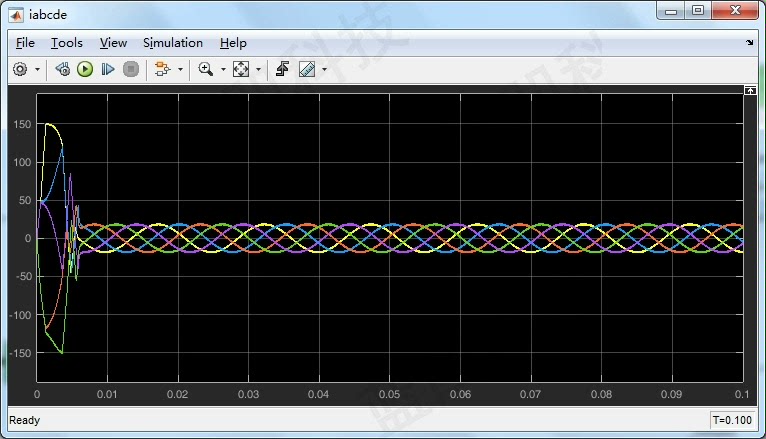
- 坐标变换模块:这里涉及到dq坐标系下的矢量控制策略,坐标变换模块的作用就是把电机的三相静止坐标系下的物理量,转换到两相旋转dq坐标系下,方便我们进行控制。以ABC三相电流变换到dq坐标系下电流为例,代码大概如下:
% 假设ia, ib, ic 为三相静止坐标系下的电流
ia = 1; ib = 0.8; ic = 0.6;
% Clarke变换
alpha = ia;
beta = (sqrt(3)/3)*(ib - ic);
% Park变换
theta = pi/4; % 假设的转子位置角
id = alpha*cos(theta) + beta*sin(theta);
iq = -alpha*sin(theta) + beta*cos(theta);这里的theta是转子位置角,它在实际系统中是实时变化的,通过传感器获取。这段代码实现了从三相静止坐标系到两相旋转dq坐标系的变换,让我们可以在dq坐标系下对电流进行更精准的控制。
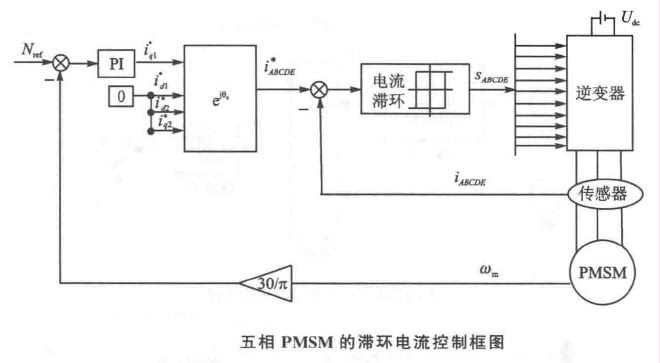
- PI控制器模块:在这个模型里,采用了转速、电流双闭环控制。转速外环采用PI控制器,它的作用是根据给定转速和实际转速的偏差,输出一个控制量,来调节电流内环的给定值。PI控制器的传递函数在Matlab里可以这样简单表示:
% 假设kp为比例系数,ki为积分系数
kp = 0.5; ki = 0.1;
s = tf('s');
PI_controller = kp + ki/s;这个PI_controller就是我们构建的简单PI控制器传递函数,通过调整kp和ki的值,可以优化转速外环的控制性能。
- 测量模块:用于测量电机的各种运行参数,像转速、电流等,这些测量值反馈到控制系统中,形成闭环控制,保证系统的稳定性和准确性。
控制策略深入剖析
整个模型采用基于dq坐标系下的矢量控制策略,同时结合转速、电流双闭环控制。转速外环采用PI控制器,电流内环采用滞环控制器。
PMSM 五相永磁同步电机的矢量控制 matlab simu link 仿真模型 (1)该模型采用 matlab/simulink 2016b 版本搭建,使用matlab 2016b及以上版本打开最佳 (2)该模型已经代为转换到各个常用版本 【算法介绍】 (1)仿真模型由直流源、逆变电源模块、五相永磁同步电机(PMSM)、坐标变换模块、PI控制器模块、测量模块等构成; (2)采用转速、电流双闭环控制; (3)转速外环采用PI控制器;电流内环采用滞环控制器; (4)基于dq坐标系下的矢量控制策略; (5)转速跟踪性能良好,具有较好的抗负载扰动性能 【简要技术说明文档和参考文献】
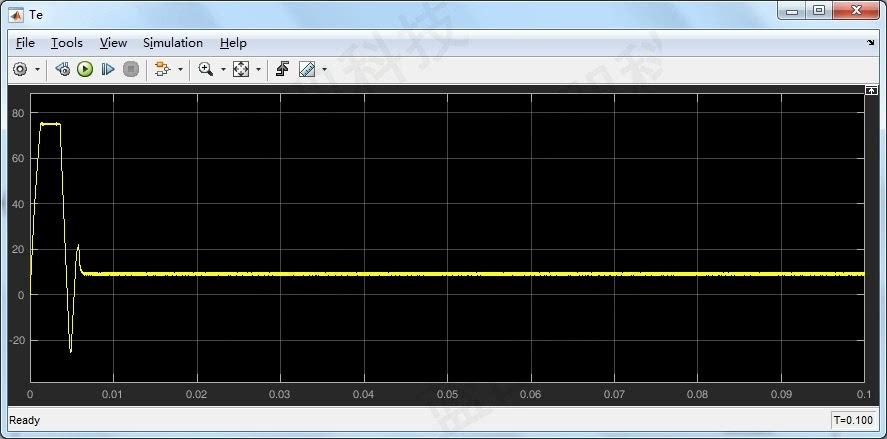
转速外环的PI控制器通过不断调整输出,使得电机的实际转速尽可能跟踪给定转速。而电流内环的滞环控制器则根据转速外环的输出,快速精确地控制电机电流,让电机能够快速响应负载变化。比如,当负载突然增加时,转速会下降,转速外环PI控制器检测到转速偏差增大,会输出一个更大的电流给定值给电流内环,电流内环的滞环控制器迅速调整逆变器输出,增大电机电流,从而使电机重新恢复到给定转速,展现出良好的抗负载扰动性能。
简要技术说明文档和参考文献
虽然这里没有详细给出技术说明文档和参考文献,但在实际研究中,这些是非常重要的。技术说明文档可以帮助我们更深入理解模型的搭建细节、参数设置依据等。参考文献则能让我们站在巨人的肩膀上,了解该领域的前沿研究和基础理论,为进一步优化模型和深入研究提供方向。

总之,这个五相永磁同步电机矢量控制的Matlab Simulink仿真模型为我们研究电机控制提供了一个很好的平台,通过对各个模块和控制策略的深入分析,相信大家能对电机控制有更深刻的认识。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐
 0
0 0
0- 0



 已为社区贡献11条内容
已为社区贡献11条内容

所有评论(0)