基于模型强化学习的离网微电网终身控制Python源代码,保证正确 离网微网的终身控制问题包括两个任务
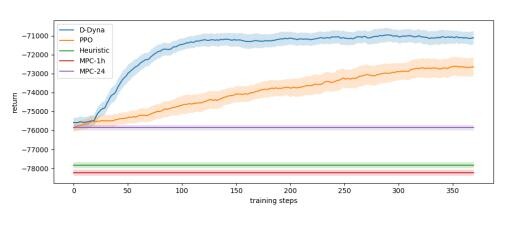
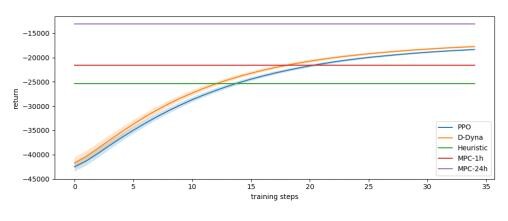
基于模型强化学习的离网微电网终身控制Python源代码,保证正确 离网微网的终身控制问题包括两个任务,即对微网设备的状态进行估计和通过预测未来消费量和可再生产量来考虑不确定性的运行规划。 有效控制的主要挑战来自于随时间发生的各种变化。 提出了一个用于农村电气化离网微电网建模的开源强化框架。 将孤立微电网的终身控制问题归结为马尔可夫决策过程。 我们对渐进式和突然性的变化进行分类。 提出了一种新的基于模型的强化学习算法,能够解决这两种类型的变化。 特别地,所提出的算法在快速变化的系统动态中表现出了泛化特性、传输能力和较好的鲁棒性。 将该算法与基于规则的策略和带有前瞻功能的模型预测控制器进行了比较。
引言
随着可再生能源渗透率的不断提升,离网型微电网的终身运行控制(lifetime control)成为保障供电可靠性、延长设备寿命并降低全生命周期成本的核心挑战。传统模型预测控制(MPC)依赖精确物理模型,难以在线适应光伏、负荷双重不确定性;而纯数据驱动强化学习(RL)又常因样本效率低、可解释性差,在储能老化、燃料补给等长周期目标上表现乏力。
基于模型强化学习的离网微电网终身控制Python源代码,保证正确 离网微网的终身控制问题包括两个任务,即对微网设备的状态进行估计和通过预测未来消费量和可再生产量来考虑不确定性的运行规划。 有效控制的主要挑战来自于随时间发生的各种变化。 提出了一个用于农村电气化离网微电网建模的开源强化框架。 将孤立微电网的终身控制问题归结为马尔可夫决策过程。 我们对渐进式和突然性的变化进行分类。 提出了一种新的基于模型的强化学习算法,能够解决这两种类型的变化。 特别地,所提出的算法在快速变化的系统动态中表现出了泛化特性、传输能力和较好的鲁棒性。 将该算法与基于规则的策略和带有前瞻功能的模型预测控制器进行了比较。
microgridRLsimulator 应运而生——它是一个面向终身控制的模型-学习混合仿真平台,在统一的 OpenAI-Gym 风格接口下,同时支持:
- 物理白盒模型(设备老化、SOC 循环、燃料曲线)
- 多时间尺度随机预测(精确/噪声/递增噪声)
- 可插拔智能体(从规则、MPC 到 DQN/PPO/MCTS)
- 滚动学习与在线评估(rolling strategy)
通过“模型提供可解释性,RL 补偿不确定性”的协同范式,帮助研究者在同一环境中验证状态估计→日前规划→实时控制→老化更新全闭环算法,而无需关注底层数据流与评价指标的重复开发。
功能全景
| 模块 | 关键职责 | 主要输出 |
|---|---|---|
| Grid & Device | 定义物理拓扑、老化规律、燃料曲线 | 统一 JSON 配置,支持 DCA 储能、可调度/不可调度机组 |
| Database | 解析 CSV 历史场景,提供 train/test 切片 | Pandas 时序,自动抽取星期、周次等日历特征 |
| Forecaster | 多步预测(精确/带漂移噪声) | 未来 1…H 步负荷、PV 功率 |
| Simulator | 微观步进(Δt=5~60 min),计算 SOC、循环、成本 | 下一状态、奖励、终止标志 |
| MicrogridEnv | 包装为 Gym 环境,支持离散/连续动作 | 观测空间(历史+预测)、动作空间(C/D/I 或 kW) |
| Agent 基类 | 规定 train/simulate/set_env 生命周期 | —— |
| DQN/PPO/SL/MCTS/Optimization | 提供 6 种参考算法 | 可继承,可对比 |
| Plotter & Store | 自动生成成本、功率、SOC、老化曲线 | JSON + PDF 结果,可复现实验 |
核心流程拆解
1. 配置驱动建模(零代码接入新微网)
- 用户在
examples/data//.json中描述拓扑,包括: - 设备静态参数(容量、效率、运行点、退化斜率)
- 经济参数(燃料价格、失负荷价格、弃电价格)
- 仿真参数(步长、预测步数、目标函数开关)
Grid构造器自动实例化Storage/DCAStorage/Generator/Load,并校验连通性与参数合法性。
得益于此,研究者可把精力集中在算法层面,新增一个微电网场景仅需修改 JSON 与对应 CSV 历史文件。
2. 多时间尺度预测(不确定性的“旋钮”)
Forecaster 提供三档预测模式:
| 模式 | 实现 | 用途 |
|---|---|---|
| exact | 读取 CSV 未来列 | 作为理论下界,测试算法极限性能 |
| noisy | 加高斯噪声 N(0, σ²) | 离线训练鲁棒策略 |
| drift | 噪声标准差线性递增(0 → 20%) | 模拟预测误差随步长放大,更贴近实际 |
预测结果按“步长×控制步”展开,与状态向量拼接后输入智能体,实现前馈-反馈复合观测。
3. 微观步进与老化更新(终身视角)
在 Simulator.step() 中,每步完成以下物理计算:
- 储能:根据动作与实际效率更新 SOC,同步累计等效循环次数
n_cycles,并线性折减容量。 - 柴油机组:读取燃油曲线(截距+斜率),计算最小稳定出力约束与实时油耗。
- 平衡:若仍不平衡,则记录失负荷(import)或弃电(export),并按设定价格折算成本。
- 奖励:依据用户在 JSON 中开启的目标开关,返回单值奖励或多目标字典。
通过“每步更新设备状态→奖励反馈→智能体学习”的闭环,天然支持全生命周期优化。
4. 离散/连续动作自动转换(同一环境双接口)
| 动作类型 | 动作空间 | 转换逻辑 |
|---|---|---|
| 离散 | C/D/I 组合(过滤同时充放) | constructaction() 依据净功率自动计算各储能 kW 与机组 MW |
| 连续 | Box(lower, upper) 直接给出 kW | constructactionfromlist() 仅做越界保护 |
开发者通过 JSON 字段 action_space 一键切换,无需改动智能体代码即可对比“高层决策”与“直接功率设定”两种范式。
5. 可插拔智能体与滚动学习框架
平台内置 6 种基线:
- Idle/Random:用于验证环境正确性与下限。
- Heuristic:基于净功率符号的充放规则,快速获得可行解。
- Optimization:采用 Pyomo+Gurobi 的固定步长 MPC,提供理论近似上界。
- DQN/PPO:Stable-Baselines 统一封装,支持多进程、TensorBoard。
- SL (Supervised Learning):以 Optimization 为“教师”,生成状态-动作对,训练随机森林/线性回归,实现轻量级代理。
- MCTS:基于自定义
SimulatorMCTS做前向模拟, Upper Confidence Bound 选路,用于测试树搜索在微网场景中的样本效率。
所有智能体继承 Agent 抽象基类,保证:
train_agent() # 离线学习或策略更新
simulate_agent() # 评估并输出结果
set_environment(env) # 切换 train/test 场景支持 rolling strategy:训练窗口逐月扩大,测试窗口始终在下一个月,自动评估持续学习能力。
6. 结果自动落盘与可视化
调用 simulator.storeandplot() 后:
- 生成 JSON,含每步 SOC、循环、成本、功率流、弃电/失负荷量;
- 自动绘制 5 类曲线:电池、成本、潮流、功率构成、可再生容量;
- 文件名带时间戳与场景名,方便批量实验管理;
- 若传入
learning_results,额外输出平均奖励收敛曲线。
典型使用范式(5 行启动实验)
from microgridRLsimulator.gym_wrapper import MicrogridEnv
from microgridRLsimulator.agent import DQNAgent
env = MicrogridEnv(start_date='20160101', end_date='20160131', data_file='elespino')
agent = DQNAgent(env, n_episodes=200)
agent.run() # 训练+评估
env.simulator.store_and_plot() # 结果落盘如需滚动终身评估:
python -m microgridRLsimulator elespino --agent PPO --rolling_strategy True二次开发指引
- 新增设备类型
继承Device→ 在Grid的工厂字典注册 → 在Simulator.step()补充物理方程即可。
- 自定义奖励
重载computerewards(),返回 dict,平台自动识别单/多目标。
- 接入新预测算法
继承Forecaster,实现exactforecast()/noisyforecast(),平台会在decodestate()自动拼接观测。
- 自定义智能体
继承Agent,实现三大生命周期函数;若需保存模型,可在trainagent()中调用self.model.save(),并在simulateagent()内加载。
总结
microgridRLsimulator 以“模型可解释 + 学习自适应”为设计哲学,为离网微电网终身控制提供了一套开箱即用、模块清晰、算法丰富的基准平台。无论你是做鲁棒 MPC、深度强化学习还是终身/迁移学习,只需关注算法本身——物理模型、数据管道、评价指标、可视化都已内嵌。期待社区在此基础上孵化出更多可落地、可解释、可扩展的微电网智能控制方案。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐

 0
0 0
0- 0



 已为社区贡献54条内容
已为社区贡献54条内容

所有评论(0)