异步电机的VVVF的C代码+仿真模型,C代码可直接在simulink模型里进行在线仿真,所见即所得
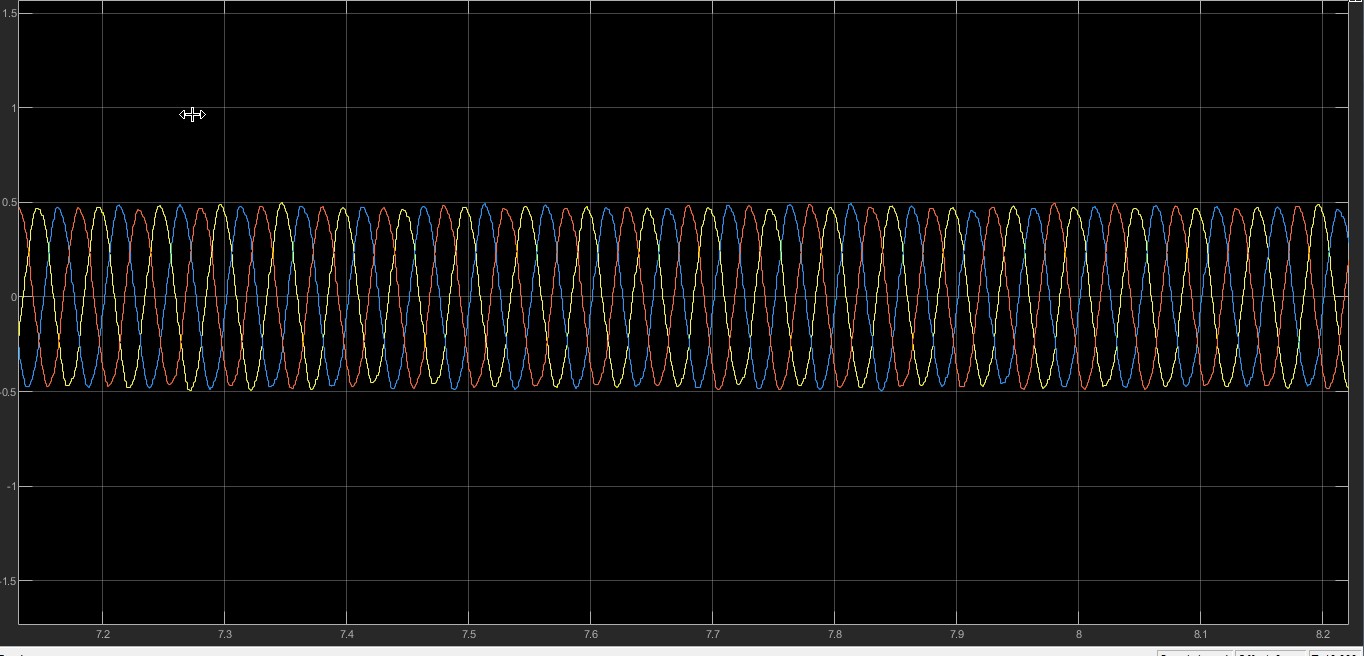
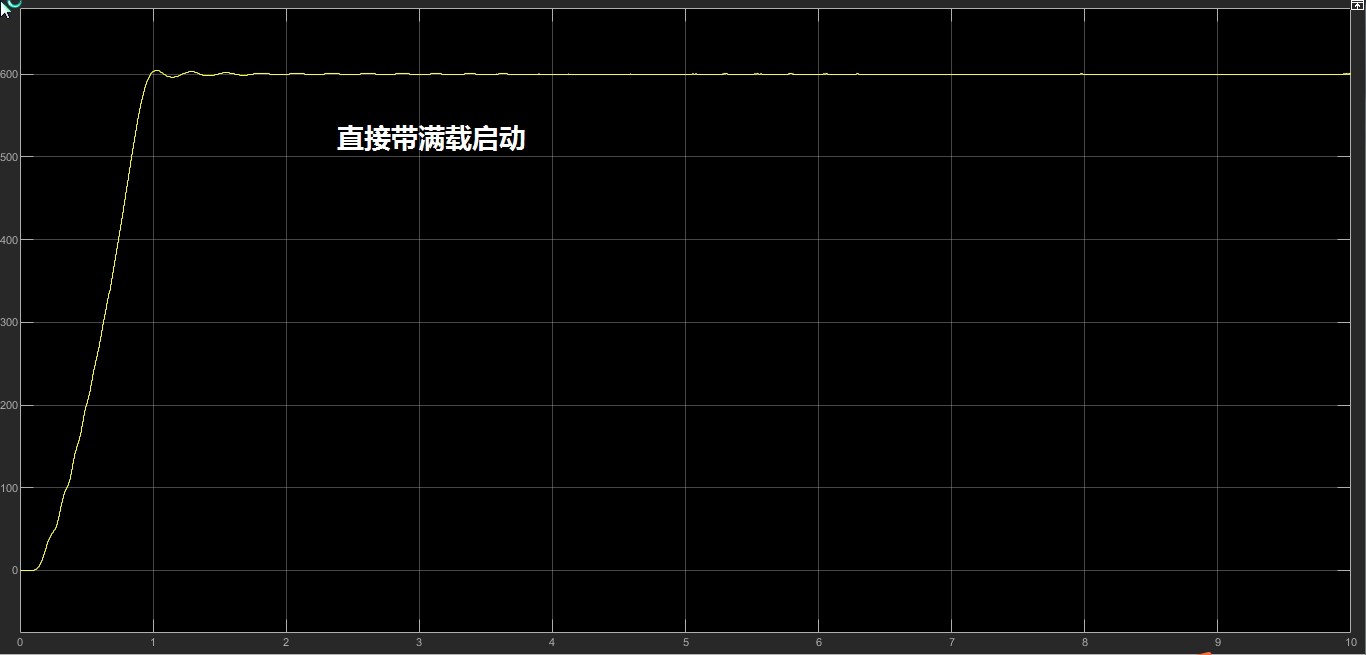
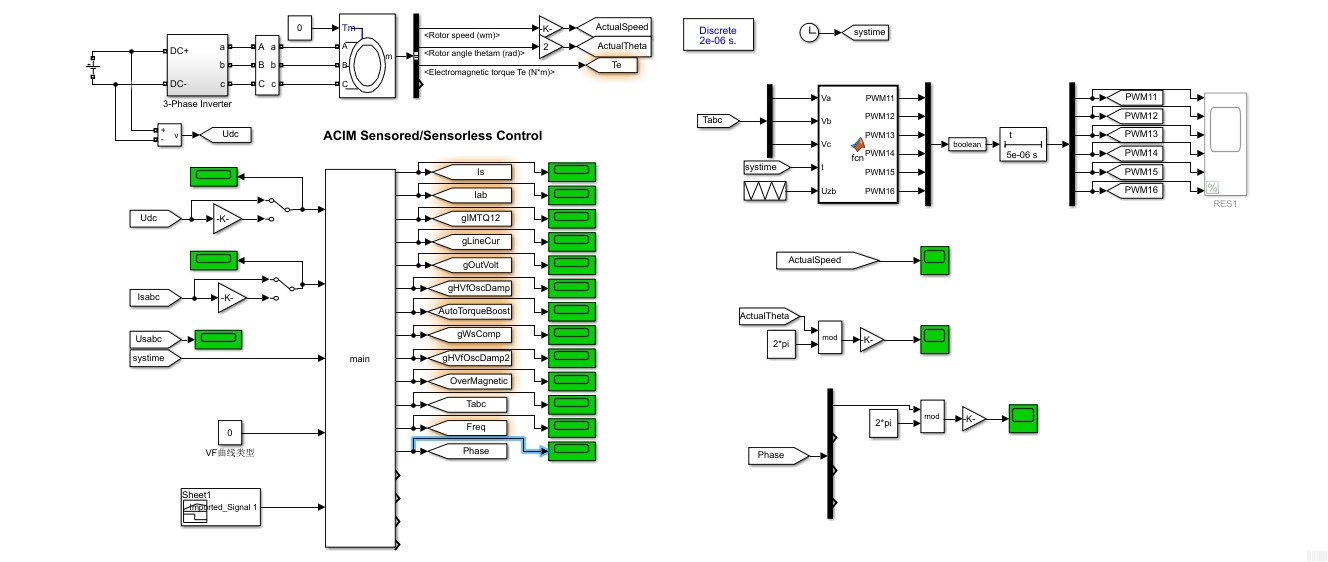
异步电机的VVVF的C代码+仿真模型,C代码可直接在simulink模型里进行在线仿真,所见即所得,仿真模型为离散化模型,C代码嵌入到模型里进行在线仿真,仿真通过后可以直接移植到各种MCU芯片里: 1. 直接带满载启动,转速超调小,控制精度高 2. 四种不同的VF曲线可供选择:直线VF , 分段VF , 抛物线VF, S形VF曲线,适用于不同类型的负载工况 3. 代码可实现自动转矩提升,转差补偿,震荡抑制,即便带满载运行,也可实现转速无静差控制 4. SVPWM调制
系统概述
这是一套完整的异步电机变压变频(VVVF)控制系统的C语言实现代码,采用模块化设计,适用于嵌入式变频器控制系统。系统基于SVPWM调制技术,实现了完整的V/F控制算法,包含自动转矩提升、转差补偿、振荡抑制等核心功能。
核心架构模块
1. 系统配置与参数定义
主要文件: Settings.h, MotorStructDefine.h
- 定义电机基本参数(电阻、电感、极对数等)
- 设置系统基准值(电压、电流、频率)
- 配置中断频率和采样周期
- 定义变频器机型参数和电压等级
// 电机参数示例
#define RS 0.048 // 定子电阻(ohm)
#define LS 0.01361 // 定子电感(H)
#define BASE_VOLTAGE 179.63 // 基准电压(V)
#define BASE_FREQ 50.0 // 基准频率(Hz)2. 数学运算库
主要文件: IQmathLib.h
提供定点数数学运算支持:
- 饱和运算
_IQsat - 乘除法运算
IQmpy,IQdiv - 三角函数
IQsinPU,IQcosPU - 四象限反正切
_IQatan2PU
3. 数据结构和全局变量
主要文件: main.h, MotorStructDefine.h
定义系统运行所需的各类结构体:
- 电机参数结构
MOTOREXTERNSTRUCT - 命令结构
BASECOMMANDSTRUCT - 电压输出结构
OUTVOLTSTRUCT - 电流采样结构
LINECURRENTSTRUCT - PWM输出结构
PWMOUTSTRUCT
核心控制算法
1. 电流坐标变换
主要文件: MotorCurrentTransform.c
实现3相/2相坐标变换:
- Clarke变换:三相静止→两相静止(α-β)
- Park变换:两相静止→两相旋转(d-q)
void ChangeCurrent(void)
{
// Clarke变换
Iab.X = Isabc.A;
Iab.Y = (Isabc.A + Isabc.B * 2) * 0.57735026918963; // 1/sqrt(3)
// Park变换
gIMTQ12.M = Iab.X * cos(gPhase.IMPhase) + Iab.Y * sin(gPhase.IMPhase);
gIMTQ12.T = Iab.Y * cos(gPhase.IMPhase) - Iab.X * sin(gPhase.IMPhase);
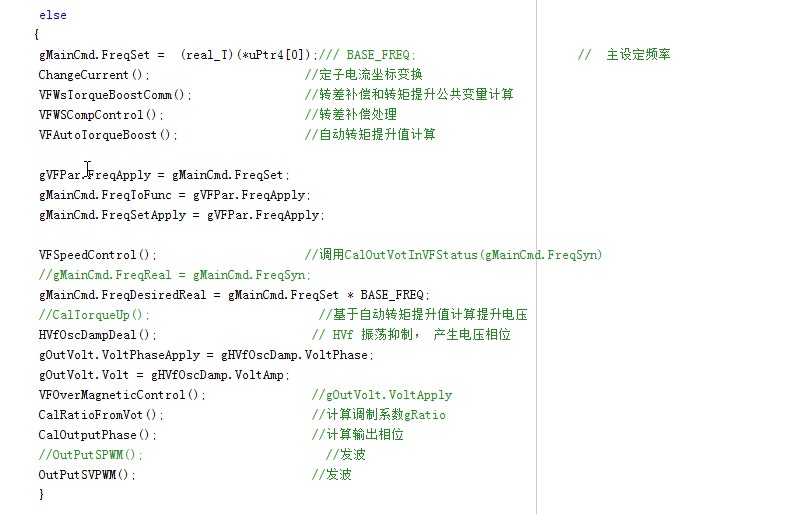
}2. V/F曲线控制
主要文件: MotorVF.c - CalOutVotInVFStatus()
支持三种V/F曲线模式:
- 线性V/F:电压与频率成正比
- 多点V/F:用户自定义频率-电压点
- 平方V/F:适用于风机泵类负载
3. 自动转矩提升
主要文件: MotorVF.c - VFAutoTorqueBoost()
异步电机的VVVF的C代码+仿真模型,C代码可直接在simulink模型里进行在线仿真,所见即所得,仿真模型为离散化模型,C代码嵌入到模型里进行在线仿真,仿真通过后可以直接移植到各种MCU芯片里: 1. 直接带满载启动,转速超调小,控制精度高 2. 四种不同的VF曲线可供选择:直线VF , 分段VF , 抛物线VF, S形VF曲线,适用于不同类型的负载工况 3. 代码可实现自动转矩提升,转差补偿,震荡抑制,即便带满载运行,也可实现转速无静差控制 4. SVPWM调制
低频时补偿定子电阻压降:
- 根据负载电流计算电阻压降
- 使用PID控制器动态调整补偿量
- 提升电机启动和低速转矩
4. 转差补偿
主要文件: MotorVF.c - VFWSCompControl()
根据负载动态调整输出频率:
- 计算转差频率补偿量
- 基于转矩电流和励磁电流比值
- 改善电机转速精度
5. 振荡抑制
主要文件: MotorVF.c - HVfOscDampDeal()
抑制电机振荡:
- 调整输出电压相位
- 基于励磁电流偏差计算补偿
- 提高系统稳定性
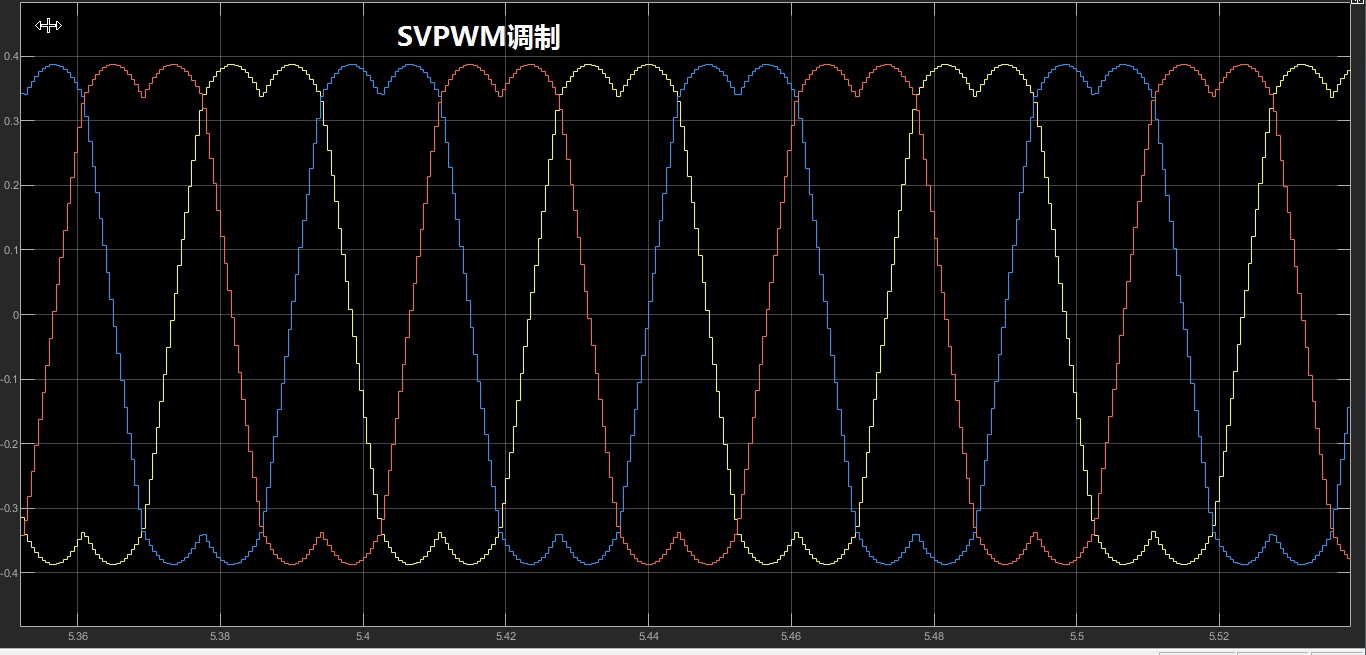
6. PWM生成模块
主要文件: MotorVF.c - OutPutSVPWM()
实现SVPWM调制:
- 电压矢量扇区判断
- 基本矢量作用时间计算
- 三相占空比生成
void OutPutSVPWM(void)
{
// α-β轴电压分量
Motor_SVPWM.alpha = gRatio * sin(gPhase.OutPhase);
Motor_SVPWM.beta = gRatio * sin(gPhase.OutPhase - PI / 2);
// SVPWM算法实现
// ... 扇区判断和占空比计算
}辅助功能模块
1. PID控制器
主要文件: SubPrg.c - PID()
实现抗饱和PID算法:
- 积分分离抗饱和
- 输出限幅保护
- 支持不同Q格式数据处理
2. 滤波器
主要文件: main.h
提供多种一阶低通滤波器:
#define Filter4(x,y) (y + (x-y)/4 * 1.0) // 4点滤波
#define Filter8(x,y) (y + (x-y)/8 * 1.0) // 8点滤波系统工作流程
- 信号采集:读取直流母线电压、三相电流
- 坐标变换:执行Clarke+Park变换得到d-q轴电流
- V/F计算:根据设定频率计算目标电压
- 补偿处理:转矩提升+转差补偿+振荡抑制
- 过励磁控制:根据母线电压调整调制比
- 相位累加:更新输出电压相位角
- PWM生成:SVPWM算法计算三相占空比
- 输出控制:发送PWM信号驱动逆变器
关键技术特点
- 模块化设计:各功能模块独立,便于维护和调试
- 参数可配置:支持多种电机类型和变频器机型
- 实时性强:采用定点数运算,适合嵌入式平台
- 鲁棒性好:包含多种补偿和保护机制
- 扩展性强:预留接口支持功能扩展
应用场景
- 工业变频器驱动
- 风机水泵控制系统
- 传送带和升降设备
- 空调压缩机驱动
- 教学和研发平台
这套代码实现了一个完整的工业级异步电机VVVF控制系统,具备良好的实时性、稳定性和可扩展性,适用于各种变频调速应用场合。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐
 1
1 0
0- 0



 已为社区贡献14条内容
已为社区贡献14条内容

所有评论(0)