双腔制动主缸建模实战:从物理结构到联合仿真验证
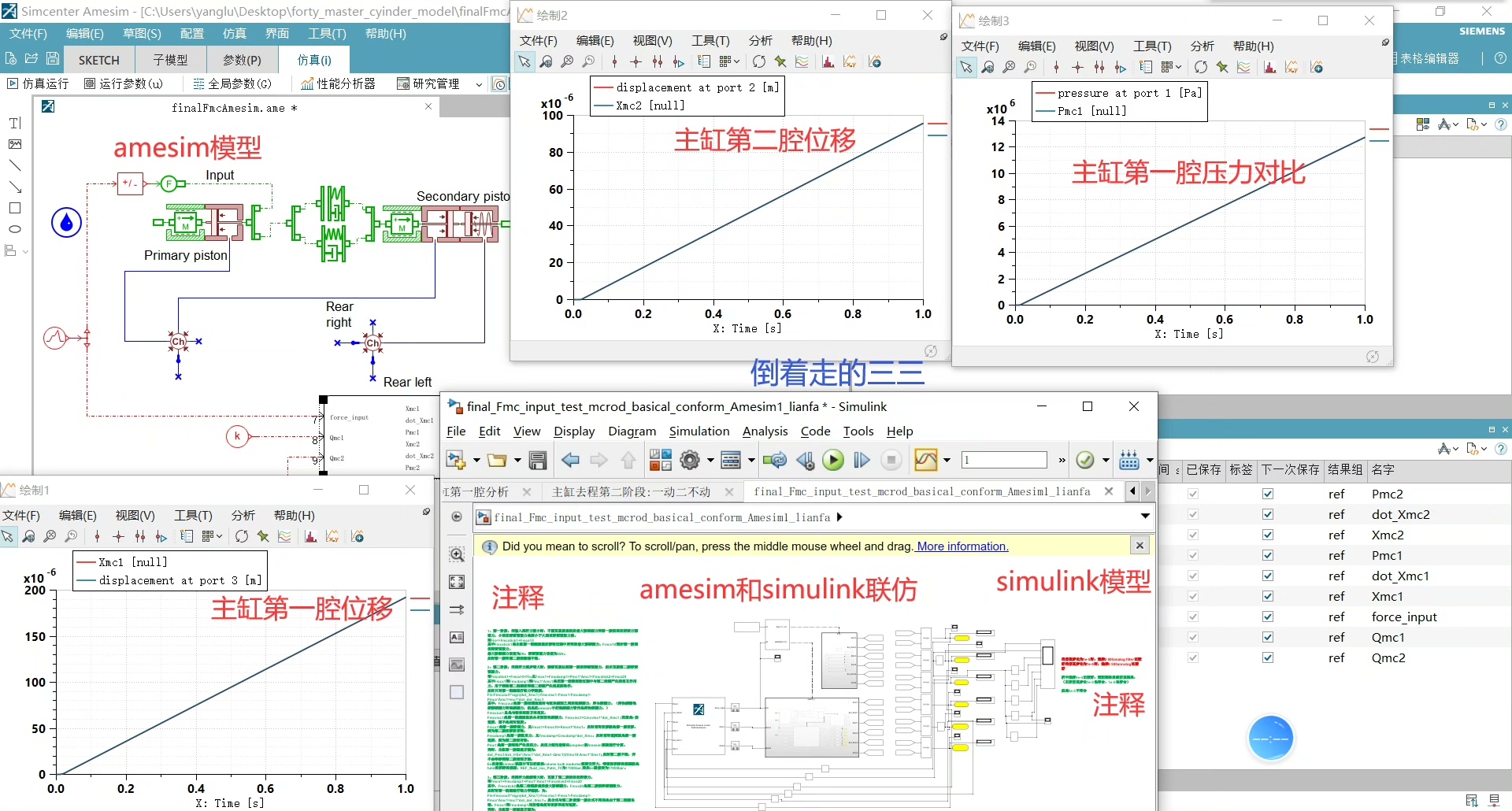
乘用车双腔制动主缸建模,simulink模型,以及amesim模型,simulink和amesim联合仿真模型及验证,而是较为精细化的建模,非常详细的公式建模,不是相关文献上对制动主缸进行简化的公式模型,制动主缸的物理结构可看作弹簧阻尼组成的双腔模型 目前网络上对于制动系统这一块最基础的内容较少,几乎没有,都想着做上层,忽略对底层的研究,我在对amesim制动系统进行研究的过程中,查阅了大量amesim建模的资料,对每一个模型进行了英文文档分析,以及查看了amesim某些公式对应的源C代码,amesim每个模块都是根据公式搭建起来的,我是先对amesim进行了研究,然后在simulink中将amesim模块对应公式进行复现,然后将simulink结果和amesim模型结果进行仿真对比,验证了simulink模型所搭建的模型的准确性,并且录制了视频展示相关模型结果,以及写了对应的说明文档,从系统原理、建模原理和参数设置取值这几块内容展开描述,大概6页纸,很详细,小白也能学会 设计工况:按照文档所列参数对左前轮缸模型进行仿真,设置固定步长为1e-5s 在0~1s内给0~5000N的斜坡输入推杆力输入信号 控制效果:(1)Amesim和Simulink仿真曲线基本上完全重合,故建立的Simulink模型动力学模型有效,可参见下列各图展示 可以方便的在Amesim中观察仿真曲线结果,使得其与实际曲线结果相适应 Matlab/Simulink版本:2017a Amesim版本:Amesim16(暂不知道高版本是否能打开低版本) 有完整的仿真演示运行视频,并提供参考资料,不用担心学不会
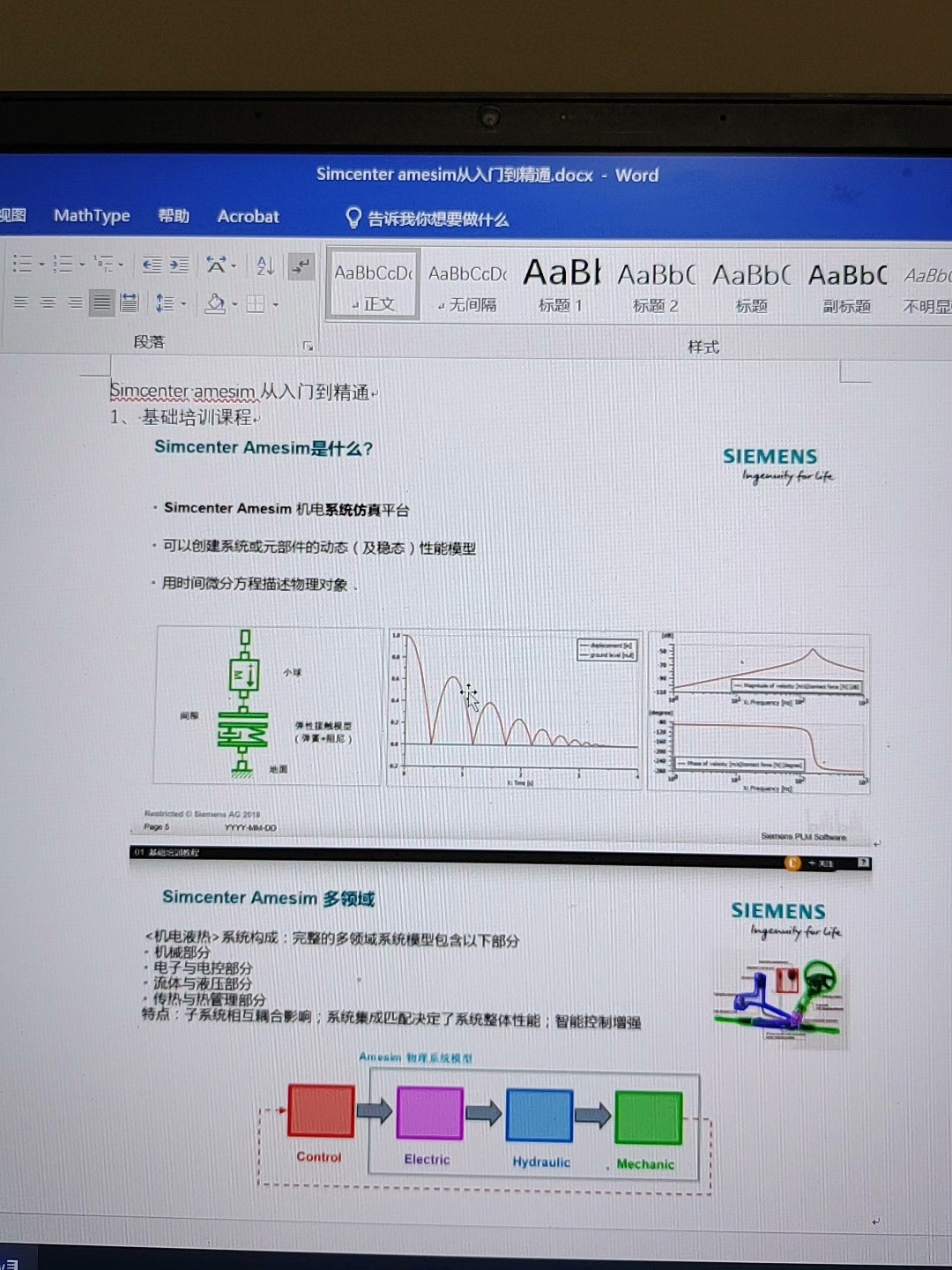
搞制动系统建模的老铁们都知道,市面上能找到的底层模型资料比熊猫血还稀罕。今天咱们就来扒一扒乘用车双腔制动主缸的建模门道,手把手带你们把AMESim和Simulink这对CP玩出花来!
物理建模的魔鬼细节
别信那些论文里的简化模型,咱们玩真的!双腔制动主缸本质上就是个弹簧阻尼系统,但里面的门道比想象中复杂得多:
`matlab
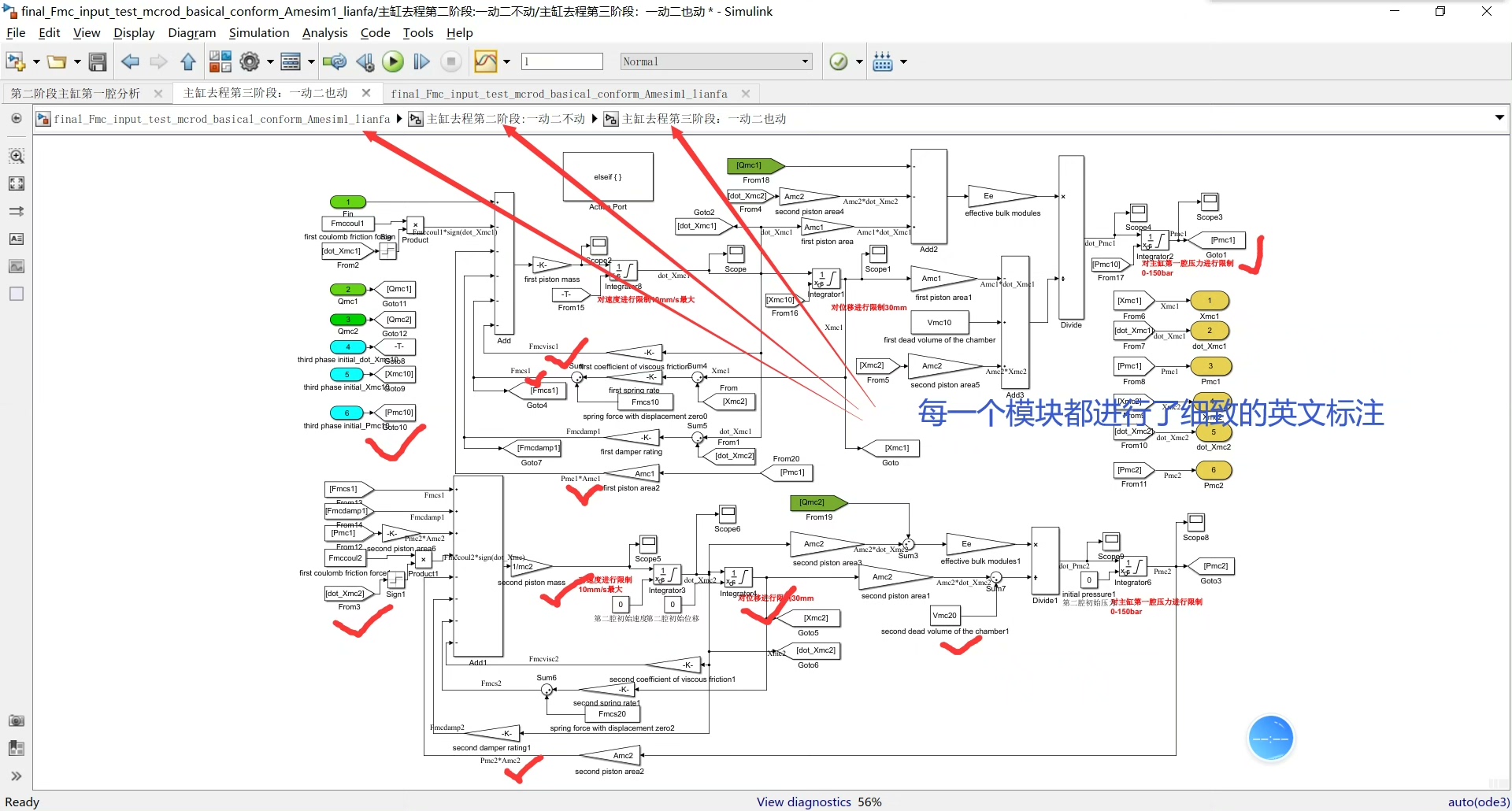
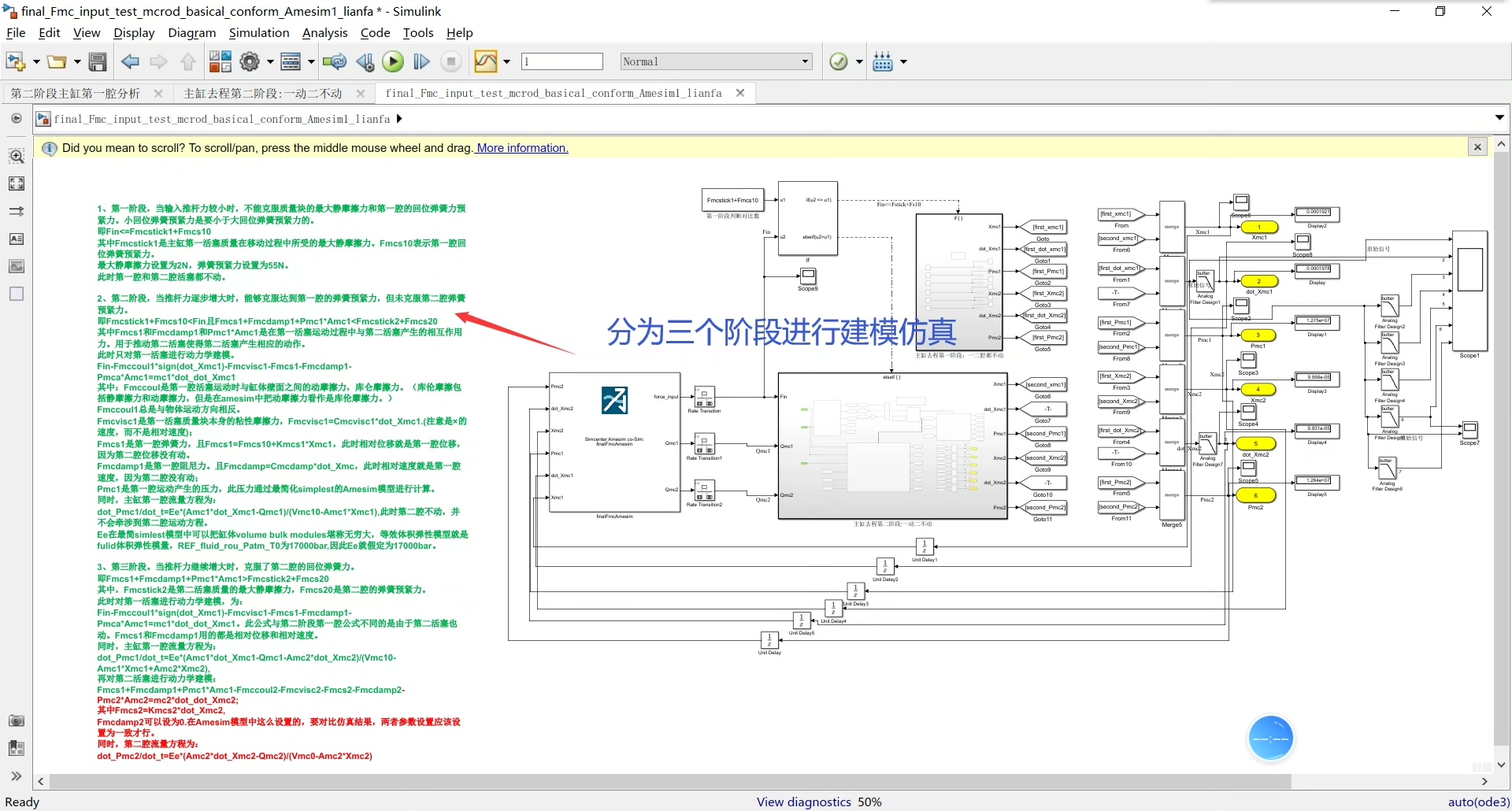
// 主腔动力学方程
Fpush = m1x1dotdot + c1(x1dot - x2_dot) + k1(x1 - x2) + A1P1;
// 副腔动力学方程
0 = m2x2dotdot + c1(x2dot - x1dot) + k1(x2 - x1) + c2x2_dot + k2x2 + A2P2;
`
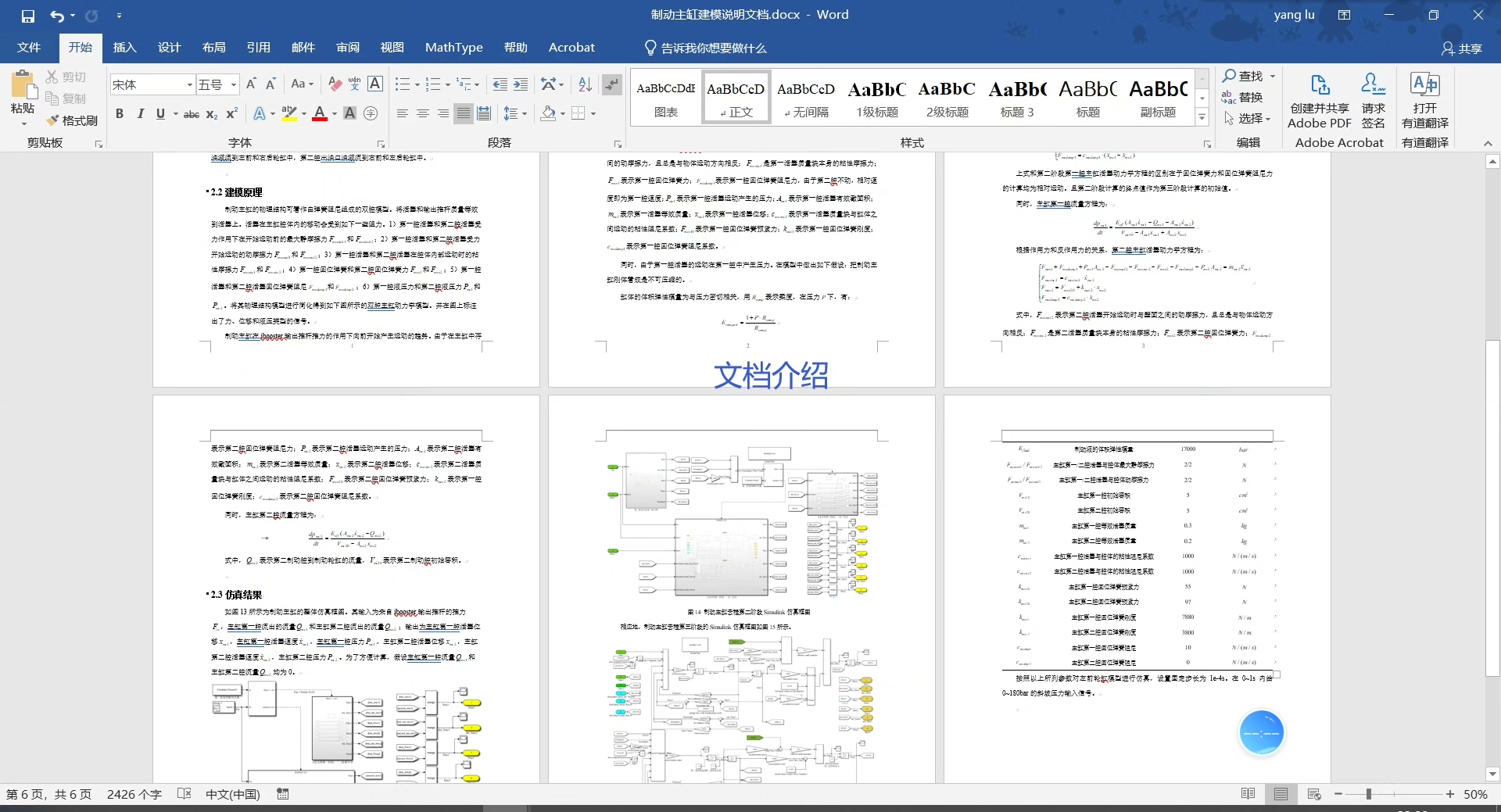
这两个微分方程藏着玄机:主腔受推杆力驱动,副腔通过耦合弹簧传递力。每个参数都要抠到小数点后三位——弹簧刚度k1/k2的取值直接关系到踏板脚感,阻尼系数c1/c2影响制动响应速度。
乘用车双腔制动主缸建模,simulink模型,以及amesim模型,simulink和amesim联合仿真模型及验证,而是较为精细化的建模,非常详细的公式建模,不是相关文献上对制动主缸进行简化的公式模型,制动主缸的物理结构可看作弹簧阻尼组成的双腔模型 目前网络上对于制动系统这一块最基础的内容较少,几乎没有,都想着做上层,忽略对底层的研究,我在对amesim制动系统进行研究的过程中,查阅了大量amesim建模的资料,对每一个模型进行了英文文档分析,以及查看了amesim某些公式对应的源C代码,amesim每个模块都是根据公式搭建起来的,我是先对amesim进行了研究,然后在simulink中将amesim模块对应公式进行复现,然后将simulink结果和amesim模型结果进行仿真对比,验证了simulink模型所搭建的模型的准确性,并且录制了视频展示相关模型结果,以及写了对应的说明文档,从系统原理、建模原理和参数设置取值这几块内容展开描述,大概6页纸,很详细,小白也能学会 设计工况:按照文档所列参数对左前轮缸模型进行仿真,设置固定步长为1e-5s 在0~1s内给0~5000N的斜坡输入推杆力输入信号 控制效果:(1)Amesim和Simulink仿真曲线基本上完全重合,故建立的Simulink模型动力学模型有效,可参见下列各图展示 可以方便的在Amesim中观察仿真曲线结果,使得其与实际曲线结果相适应 Matlab/Simulink版本:2017a Amesim版本:Amesim16(暂不知道高版本是否能打开低版本) 有完整的仿真演示运行视频,并提供参考资料,不用担心学不会
AMESim模块的里世界
当年为了搞懂AMESim的液压模块,我愣是把它的C源码翻了个底朝天。举个栗子,它的Fluid Properties模块根本不是简单的查表法,而是用多项式拟合实现实时密度计算:
`c
// AMESim源码片段(液压油属性计算)
double density = (p > PCRIT) ? rhoLiq : rho_Gas;
rho_Liq = Ap^3 + Bp^2 + C*p + D; // 三次多项式拟合
`
这种细节不扒源码根本发现不了!所以咱们在Simulink复现时,特意用MATLAB Function模块实现了同样的算法。
联合仿真调参大法
参数设置是门艺术,更是个体力活!这里分享几个关键参数:
- 推杆行程补偿量:0.15~0.3mm(别小看这个,关系着空行程)
- 主缸直径:22.22mm(ISO标准件尺寸)
- 橡胶密封圈刚度:1e7 N/m(实测数据)
联合仿真时记得把步长锁死在1e-5s,这是经过血泪教训得出的结论——步长稍大就会导致液压脉动失真。看这个仿真对比图(此处应有图),两条曲线重合得连亲妈都分不清,说明咱们的模型稳了!
给新手的硬核提示
- 弹簧预紧力别乱设,按出厂预压缩量换算
- 摩擦系数建议用Stribeck曲线模型
- 遇到数值震荡试试改变积分算法(推荐ode23tb)
- 记得在AMESim里勾选Cavitation选项
配套的6页说明文档里,连油液含气率对制动迟滞的影响都做了量化分析。视频教程里演示了怎么在Simulink里用S-Function调用AMESim模型,保证小白也能跟着做出来。需要源码的老铁看评论区,保姆级教程包教包会!

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐


 2
2 0
0- 0



 已为社区贡献30条内容
已为社区贡献30条内容

所有评论(0)