护航飞行安全!凯云飞控半实物实时仿真测试平台,筑牢航空研发防线
01
研制背景
全球航空业正经历从双寡头到多极化的深刻变革。中国商飞凭借C919加入干线竞争,空客A220拓展细分市场,巴西航空工业则巩固支线优势。技术层面,综合模块化航电(IMA)架构成为新标杆,动力系统向电动化与新能源突破,这推动适航认证体系向更灵活的标准演进。同时,第六代空战系统推动军民技术深度融合,低空经济与数字化运维则催生全新产业生态。竞争核心已升维至定义技术标准、构建产业生态的体系化能力。一个在标准、技术与生态中多维竞合的新时代已经到来。
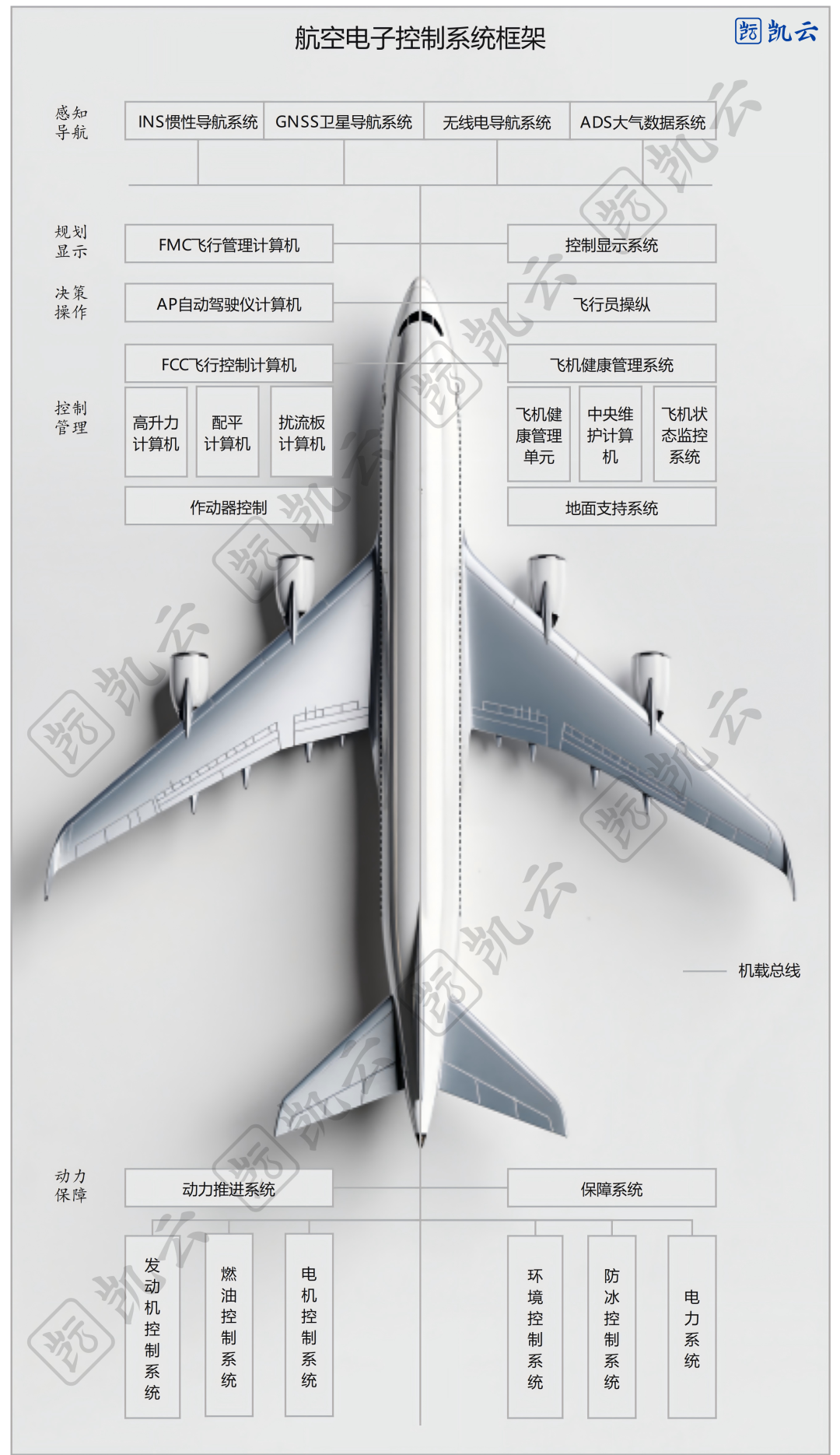
现代航空电子与控制系统是一个基于“感知-决策-控制-执行”逻辑分层智能系统。感知层(INS、GNSS、ADS、无线电导航)持续采集飞机状态与外界环境数据。规划与显示层的核心:飞行管理计算机,作为大脑,处理信息并生成优化的飞行计划,通过显示系统与飞行员交互。决策与控制层的飞行控制计算机则像神经中枢,将指令转化为具体的舵面控制命令,由飞行员或自动驾驶仪执行。最终,动力系统(发动机、燃油控制)、环境控制系统、电力系统等提供了全面动力与保障,并由飞机健康管理系统全程监控。整个系统通过高速数据总线交联,正向着深度综合化与高度智能化演进,是飞机实现安全、高效自动飞行的核心,也是进行系统设计与测试的基石。
02
飞控计算机原理
飞控计算机是飞行控制的核心处理器。它实时接收来自传感器(如
IMU、GPS、大气数据)的状态信息,并依据预设的控制律进行计算,生成精确的控制指令。随后,这些指令被发送至作动控制器,驱动各个舵面(如副翼、升降舵、方向舵)的作动器,从而控制飞机的姿态与航迹。整个过程形成一个高速闭环:飞控计算机不断比较实际飞行状态与期望指令(来自飞行计划或飞行员输入),通过计算差值并输出纠正信号,实现对飞机的稳定、精确操控,其核心原理是基于反馈的自动控制。
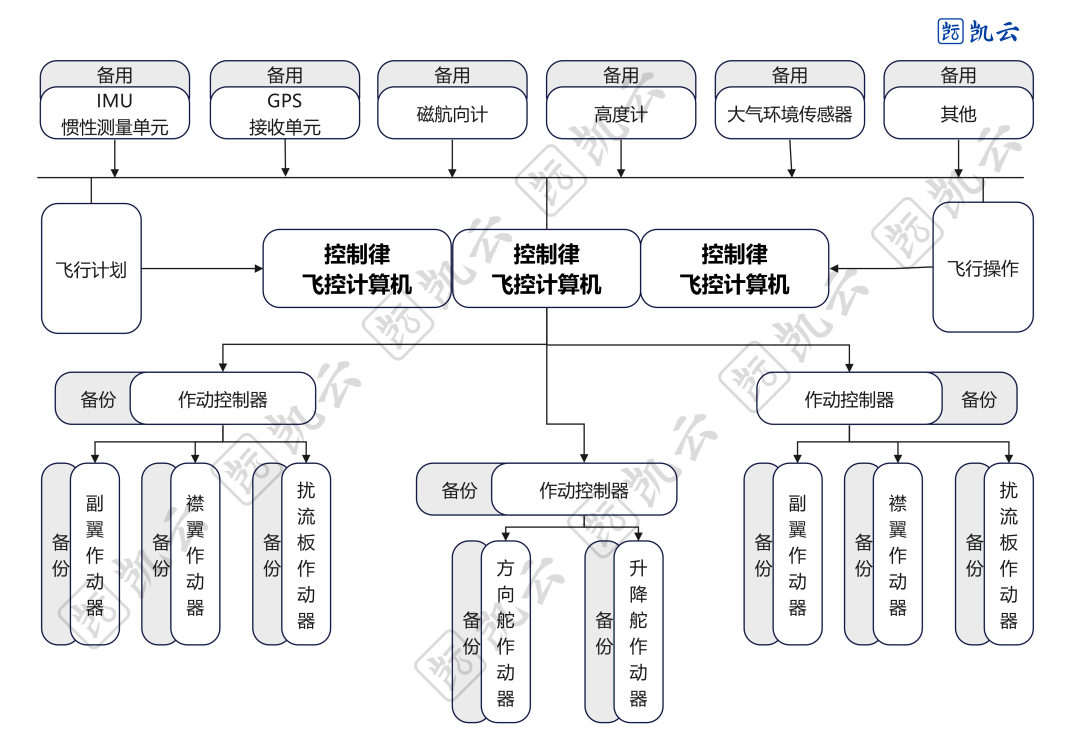
图1 飞控计算机原理图
飞控计算机研制过程中,半实物仿真是必不可少的甚至是唯一有效的测试验证手段,它对提高飞控系统设计质量,降低研制成本,缩短研制周期等具有机器重要的作用。据统计,半实物仿真技术可缩短研制周期20%-40%,节约定型试验样本数10%-30%,减少试验次数50%-80%,缩短联调时间40%-60%。
飞控半实物仿真是现代航空研发的安全基石与效率核心。它在实验室中将真实的飞控硬件接入高保真的虚拟飞行环境,构成闭环测试。其首要价值在于绝对安全:可无风险地反复测试传感器失效、舵面卡阻等数百种故障,以及失速、尾旋等危险飞行状态,彻底验证系统的安全边界和保护逻辑。经济上,它能大幅降低成本和周期,将大量缺陷在地面解决,节省数千万美元。同时,它是满足最高适航标准的强制性验证环节,为安全性认证提供关键证据链。随着飞机系统日益复杂,它更是驾驭IMA航电、电传飞控等新技术的唯一可靠手段,确保复杂交互的可靠性。从本质上讲,半实物仿真是连接虚拟设计与真实飞行之间不可替代的质量关口与信任桥梁。
鉴于飞控半实物仿真系统的重要作用,研华联合凯云科技推出了半实物仿真测试系统,覆盖军工、民航和低空行业的飞控计算机半实物仿真测试需求。具有功能强大、配置灵活、强实时性和高稳定性的特点,已在多个场合长周期稳定运行。
03
系统可支撑的业务功能
飞控半实物仿真测试系统是现代航空工业的核心测试验证手段,它贯穿于飞机从设计、集成、验证到运营维护的全生命周期,支撑着多维度、多层级的关键业务功能。
研发设计阶段
-
控制律快速原型与验证:算法下载至控制器或RCP,快速迭代和优化算法。
-
系统架构权衡分析:对比不同余度方案、总线架构的性能与可靠性。
-
实时性分析与优化:验证任务调度时序,确保关键控制回路的确定性与时效性。
集成验证阶段
-
硬件接口与协议验证:基于航电总线的接口集成测试,验证系统功能。
-
系统集成故障注入:模拟总线错误、电气故障、电源扰动等异常工况。
-
人机交互验证:结合“驾驶员在环”,验证告警逻辑、显示信息和操纵感受。
系统认证与适航符合性
在系统认证维度,半实物仿真测试系统是依据ARP4754A(航空器与系统开发指南)和ARP4761(安全性评估方法指南)实现系统级集成验证与安全性评估的核心平台。它在实验室环境中完成系统功能集成测试和故障模式验证,为系统设计保证和安全性评估结论提供关键证据。
在适航认证维度,HIL是支撑证明符合CCAR/FAR/CS 25.1309(设备、系统及安装)等安全性条款以及DO-178C(机载软件)与DO-254(机载硬件)符合性要求的关键工具。它通过可审计的测试,生成验证系统在正常及故障条件下安全性的客观数据,为局方审查和最终颁发型号合格证提供必需的符合性证据。
运营与维护支持
-
故障树分析验证:注入特定故障组合,验证维护手册中的故障隔离程序。
-
预培训与程序验证:为试飞员和工程师提供高保真培训,预演高风险试飞科目。
-
在役问题调查:精准复现航空公司报告的空中异常事件,定位根本原因。
04
系统技术优势
凯云自主研发的飞控半实物仿真测试平台,具有如下技术优势:
-
专业性:软硬件+模型的完整解决方案,丰富项目案例,虚实切换
-
扩展性:基于ETest/SimuRTS的软硬件生态和扩展能力,单机/分布式部署
-
国产化:支持国产OS+信创硬件,全自主研发
|
技术能力 |
具体要求 |
支撑的业务 |
|
高保真实时仿真 |
解算步长 ≤ 1 ms,模型精度误差 < 3% |
控制律验证、包线测试 |
|
复杂故障注入 |
支持数百种可编程故障,注入延迟 < 10 μs |
FMEA验证、故障诊断 |
|
多速率协同仿真 |
同步飞控、航电、动力等多子系统不同仿真步长 |
全机系统集成 |
|
自动化测试与管理 |
覆盖测试需求、测试设计、测试程序、测试发布、测试执行、测试数据、测试报告全流程 |
适航符合性、回归测试 |
|
数据采集与诊断 |
高速记录所有总线与离散信号,支持时间回溯分析 |
故障复现、性能分析 |
05
系统技术特点
总体功能包括:
(1)支持simulink环境下的飞行动力学仿真模型搭建;
(2)支持多旋翼、固定翼等小型无人机飞控系统设计验证;
(3)支持飞控快速控制原型设计;
(4)能够模拟飞行器姿态,激励真实陀螺仪的三轴陀螺输出;
(5)支持三维视景显示软件FlightGear下的三维可视化仿真,能够演示飞行器姿态、位置动态变化及与参照物的相对运动关系,能够直观、形象的显示仿真过程;
(6)支持仿真模型的编译、下载、运行;
(7)支持仿真过程中的在线调参和实时监控。
(8)支持硬件接口扩展,可集成多飞控实验箱,实现编队模型系统验证。
(9)支持飞行控制指令的实时响应自动化测试和故障注入测试。
(10)可实现从飞控算法、飞行器动力学模型以及姿态模拟验证到实际飞控与转台的联合测试。
(11)能够通过控制三轴转台动态模拟无人机三轴姿态,激励pixhawk飞控板载的指令信号输出
06
系统构成
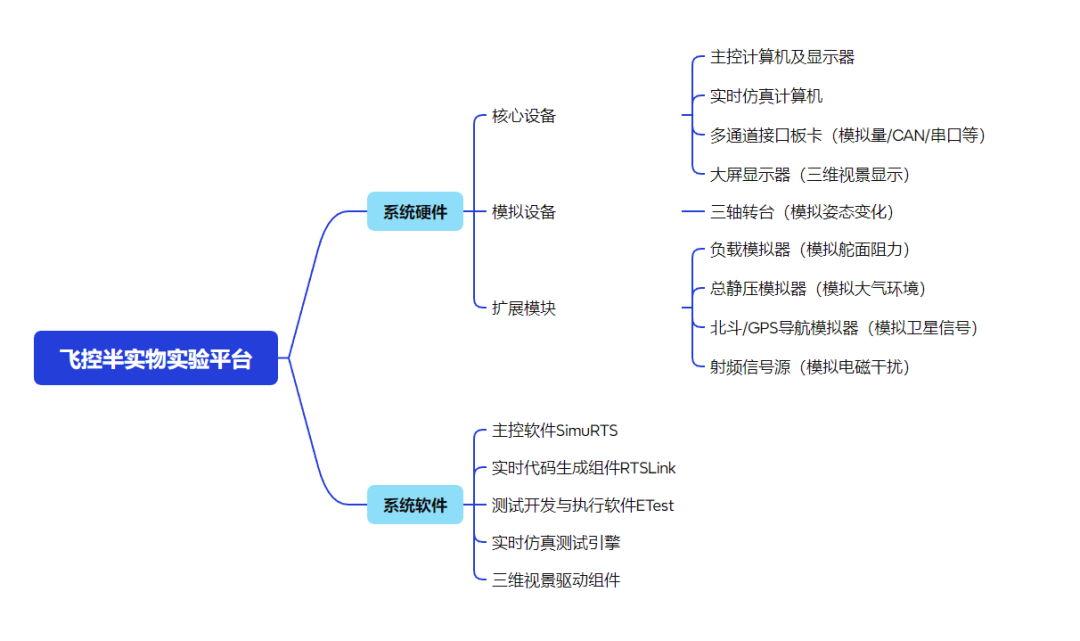
图2 系统构成图
飞控半实物实验平台包括系统硬件和系统软件两部分。系统硬件和软件的组成及功能主要为:
系统硬件
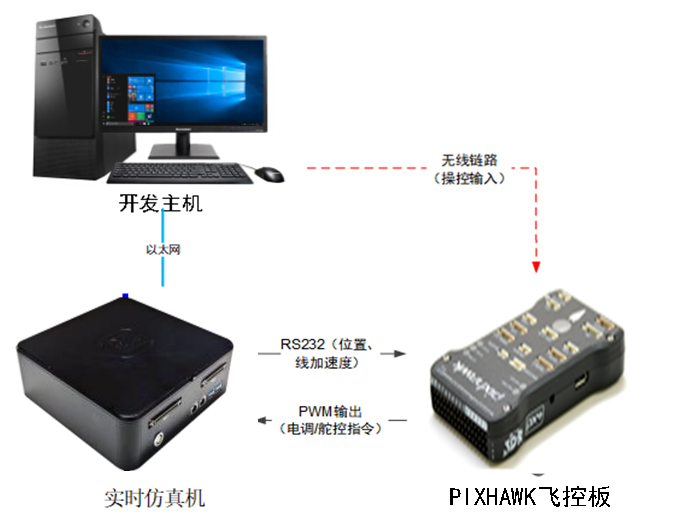
图3 系统硬件构成图
➤核心设备:主要为主控计算机、实时仿真计算机、通讯板卡和大屏显示器。实验人员可以在主控计算机中设计和开发飞行动力学模型,通过实时仿真计算机和通讯板卡进行半实物仿真测试,支持飞控计算机/飞控板、舵机、导航设备等实物的接入。
➤模拟设备:主要为三轴转台,可将飞控板或飞机实体模型放置在转台上,在实时仿真过程中,实时同步展示飞机的飞行姿态。
➤扩展模块:可选项,实验人员可根据需要加配负载模拟器、总静压模拟器、北斗/GPS导航模拟器和射频信号源等,用来模拟更复杂场景的测试。
系统软件
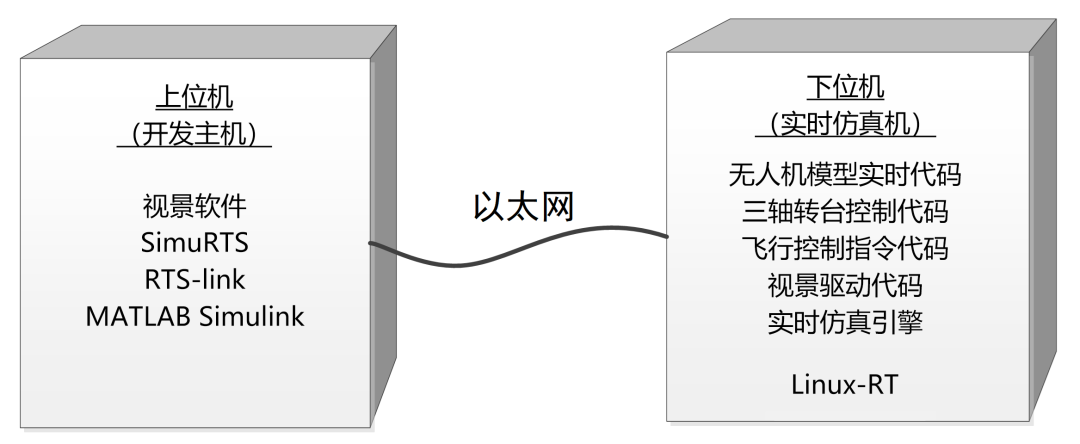
图4 系统软件构成图
➤主控软件:SimuRTS作为主控软件,可将Simulink中的模型文件以及生成的代码文件导入,建立对应的仿真工程,并完成模型自动下载、运行控制、模型状态监视、在线调参、数据存储及后处理等功能。
➤实时代码生成组件:实时代码生成组件RTSLink集成于MATLAB Simulink环境中,可将Simulink模型自动生成实时仿真计算机中可运行的目标代码。
➤测试开发与执行软件:可进行测试用例的设计与开发,验证控制指令的实时响应;可进行故障注入测试,模拟传感器失效、通信中断等故障。
➤实时仿真测试引擎:运行于实时操作系统之上。能够启动一组任务,包括命令通讯任务、数据通讯任务、存储任务、模型调度任务等,为模型目标代码的加载、运行、监控提供基础环境。
➤三维视景驱动组件:能够驱动第三方视景软件输出飞行器的俯仰角、滚转角、偏航角等姿态信息。
系统模型
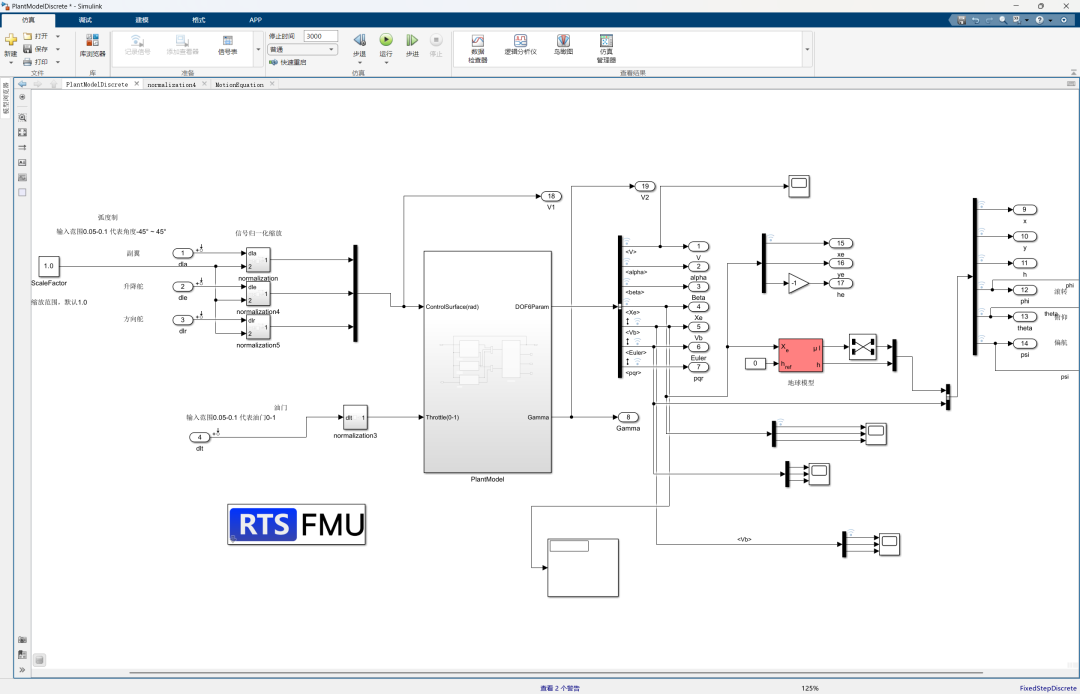
图5 动力学模型
飞行动力学模型由几大核心子系统构成:气动子系统通过气动系数数据库和导数模型,计算飞机在各种状态下受到的升力、阻力和力矩。推进子系统模拟发动机推力产生、燃油消耗及动力响应动态。质量与惯性子系统实时计算机体重心、质量和转动惯量变化,特别是燃油消耗的影响。大气环境子系统提供标准/非标准大气参数、风场及紊流模型。重力子系统则计算地球引力。这些子系统通过六自由度运动方程紧密耦合,实时解算飞机姿态、位置和速度,共同构成了飞行仿真、控制律设计和安全评估的虚拟物理基础。
07
系统原理
飞控半实物实验平台采用“上-下”位机架构,上位机是1台主控计算机,是用户进行飞行控制系统设计和试验运行管理的环境;下位机是1台实时仿真机,运行无人机动力学、传感器及大气环境模型实时代码,并通过I/O通道与被测飞控板实现连接。
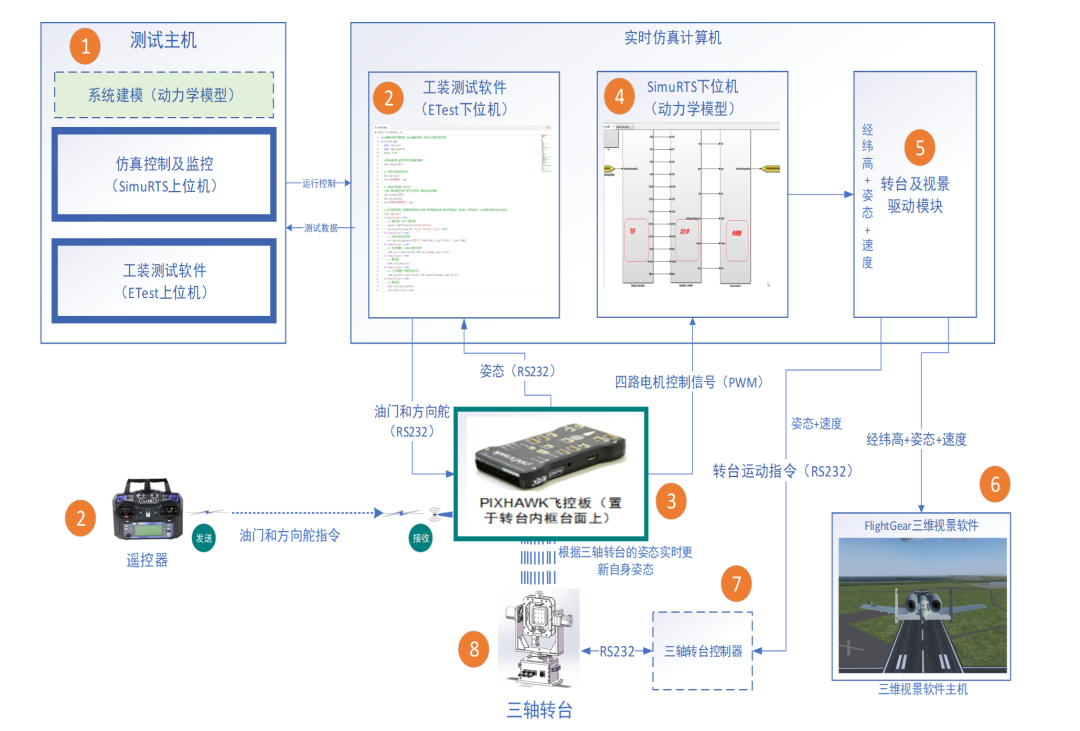
图6 系统工作原理图
测试主机

图7 SimuRTS主界面图
首先试验人员在测试主机上进行无人机动力学模型的建模(支持simulink、MWorks等仿真建模工具),通过RTSLink插件将模型生成符合FMI规范的FMU模型。
其次,试验人员通过SimuRTS上位机软件可以对生成的FMU模型进行输入输出和参数配置,将无人机动力学模型的输入输出信号与真实的物理通道进行绑定,同时也可以设置模型的仿真步长等属性。
在SimuRTS上位机软件中完成无人机动力学模型的配置后,即可开始动力学模型的仿真试验,SimuRTS上位机软件能够自动将选择的动力学模型下载到实时仿真计算机中,以SimuRTS下位机软件(动力学模型)的方式运行;仿真运行过程中,SimuRTS上位机软件能够进行仿真监控和在线调参。
在仿真执行过程中,可以通过ETest上位机软件运行工装测试软件,能够根据实际需求模拟典型的飞控系统故障,以完成飞控板的功能性能验证。
指令输入
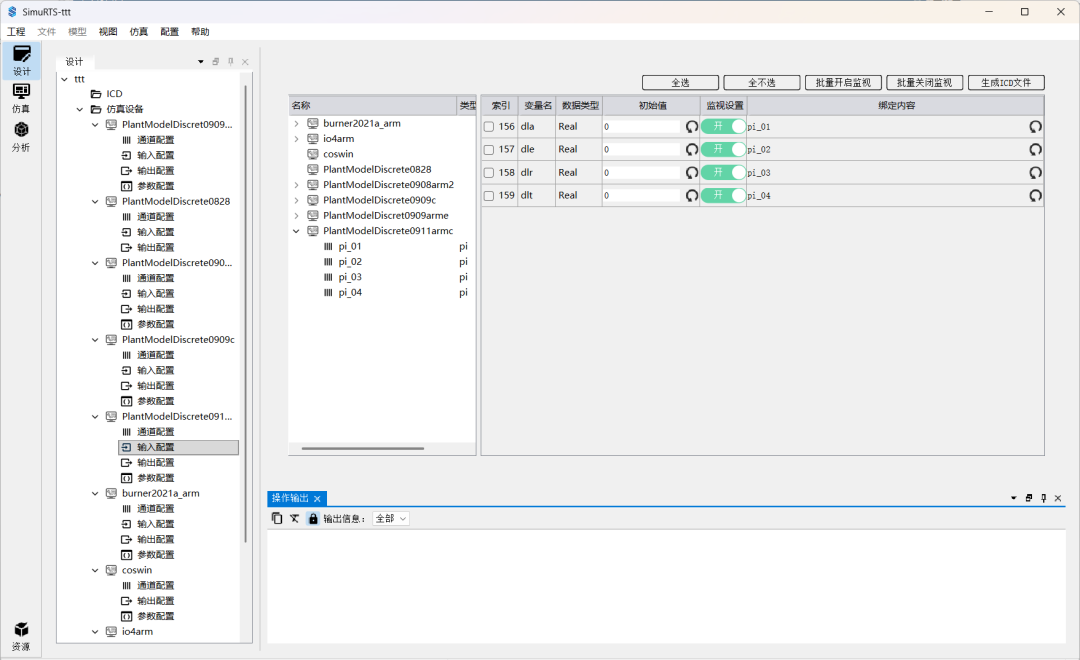
图8 SimuRTS输入输出绑定界面
支持以下两种方式发送飞行器控制指令:
操作员通过手中的飞行遥控器发出无线指令。遥控器中的左摇杆控制油门和方向舵,右摇杆控制升降舵和副翼。
操作员使用工装测试软件,根据所需的飞行器运动,将舵面操纵指令以mavlink协议格式通过RS232串口发送到PIXHAWK飞控板上。
飞控处理
飞控板在接收遥控器无线指令或工装软件发送的mavlink运动指令后,会结合自身预设的控制律算法进行处理,最终输出四个关键的指令信号。这四个信号分别对应控制固定翼飞行器的:升降舵、方向舵、油门和副翼。
SimuRTS下位机软件(无人机动力学模型)
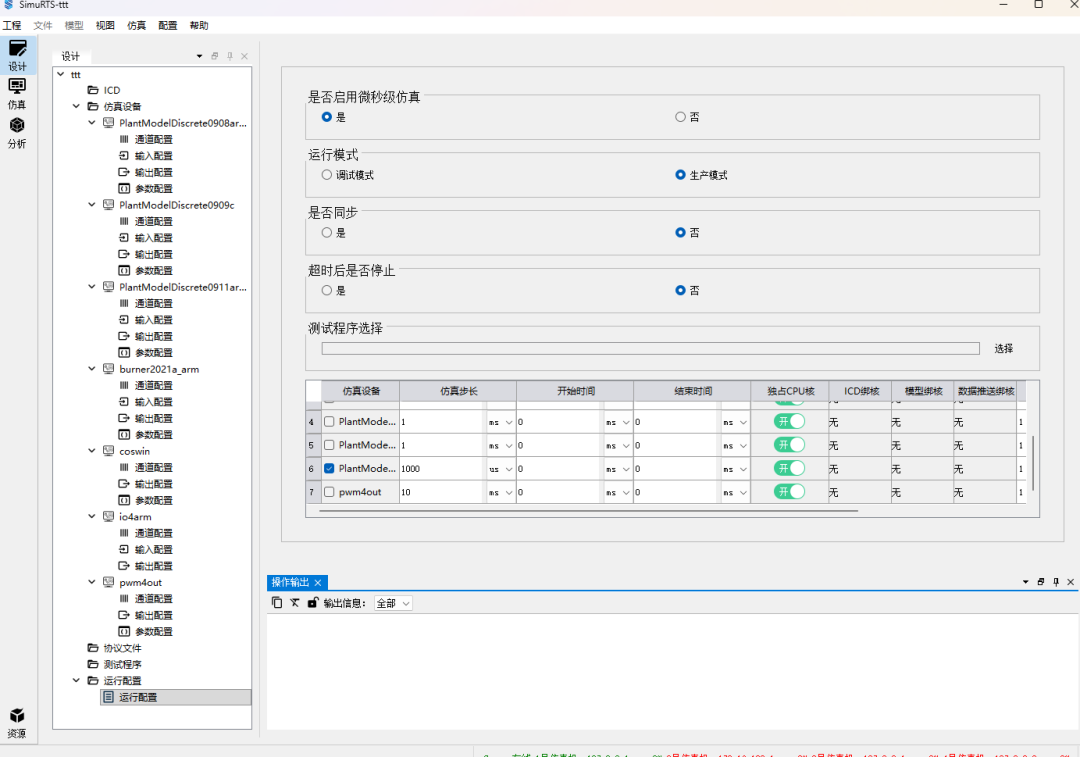
图9 SimuRTS运行配置界面图
试验人员在测试主机中通过SimuRTS上位机软件启动模型的仿真后,实时仿真计算机中的无人机动力学模型即自动开始运行,动力学模型运行过程中,通过SimuRTS下位机软件,实时采集四个指令信号,采集到的指令信号作为舵面信号输入,驱动运行在它上面的固定翼飞行器数学模型。
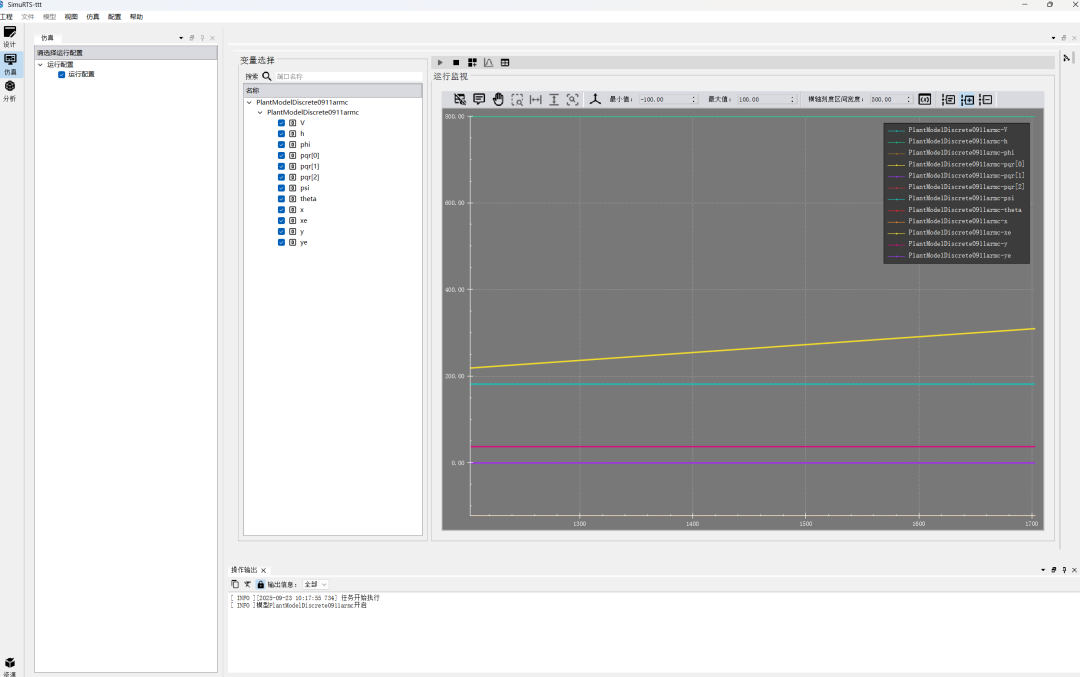
图10 SimuRTS运行控制界面图
无人机动力学模型内部包含空气动力学模块、重力模块、飞行动力学模块等。模型接收到四个舵面的控制量后,进行复杂的物理计算:首先计算出飞行器受到的合外力与合外力矩,进而解算出飞行器的速度、航向、姿态(俯仰、滚转、偏航)以及位置。最后,通过地球模型(WGS84)将位置信息转换为直观的经度、纬度和海拔高度。
转台及视景驱动模块
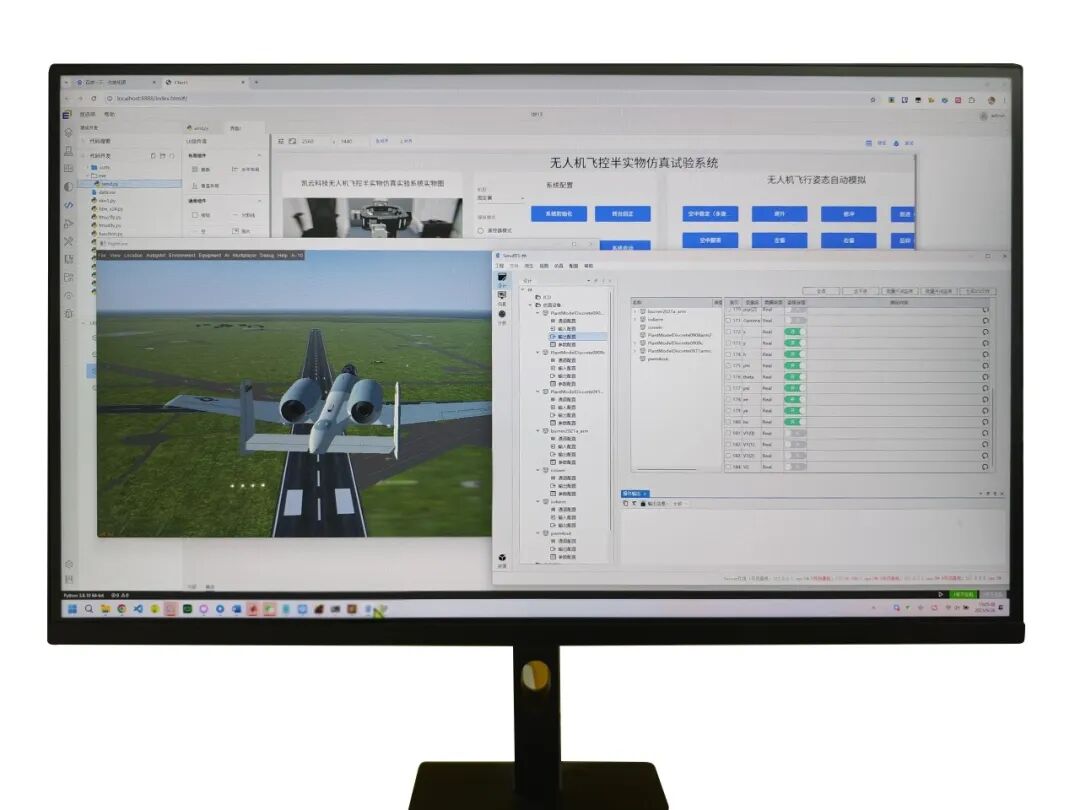
图11 完全界面显示器
仿真计算出的飞行器状态数据,会经过转台及视景驱动模块,该模块将运动数据处理后,会将得到的经纬度、海拔高度、姿态角和速度等数据使用FDM消息体格式封装,通过UDP通道发送给三维视景软件主机。同时,转台驱动模块对飞行器的姿态以及角速度等信息,使用转台控制协议,将运动指令以RS232串口发送到三轴转台控制器。
三维视景显示
三维视景软件主机在收到消息后,驱动FlightGear三维视景软件,根据选择的仿真飞机机型,实时生成逼真的飞行器飞行画面。这样,用户就能直观地看到飞行器在三维环境中的飞行姿态、速度、位置以及它的运动轨迹。
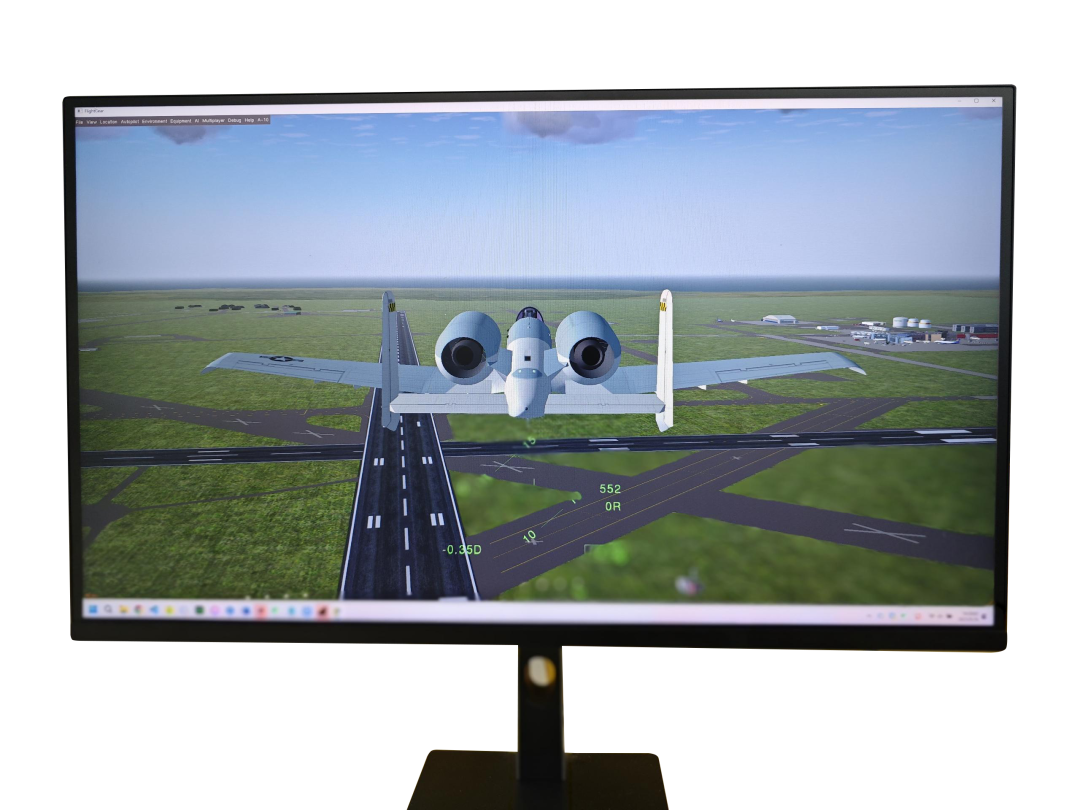
图12 三维视景显示器
三轴转台控制器
三轴转台控制器在接受到运动指令后,会对运动指令进行解析,分成XYZ三轴的运动方向、运动速度、加速度和运动终点位置。将这些信息通过三轴电缆发送至三轴转台。
三轴转台
三轴转台接受到控制器发来的运动指令,精确地按照仿真计算出的姿态和角速度进行运动。这不仅允许用户可以直接看到模拟出的空中姿态变化。同时,安装在转台上的真实飞控板,会感知到转台的运动,并根据其自身的控制律和传感器数据,实时对原始的油门、副翼、升降舵、方向舵控制信号进行闭环微调,以满足飞行的稳定性和性能要求。

图13 整体架构组成图
08
平台推荐配置
|
分系统 |
名称 |
规格 |
说明 |
|
系统硬件 |
主控计算机 |
CPU:i7, 16核 内存:32G 硬盘:1T SSD 显卡:4G显存 |
|
|
显示器 |
27寸 |
||
|
实时仿真计算机 |
研华嵌入式工业电脑PCIE机箱 |
按需配置 |
|
|
串口卡 |
研华PCIE-1600系列,8路RS232/422/485,速度高达921.6 kbps,支持极速数据传输 |
||
|
数字IO卡 |
研华PCIE-1700系列,96通道TTL数字I/O |
||
|
模拟量输入卡 |
研华PCIE-1800系列,32通道单端或16通道差分或模拟输入的组合 |
||
|
模拟量输出卡 |
研华PCIE-1800系列,32路模拟输出通道 输出范围:±10v |
||
|
CAN卡 |
研华PCIE-1600系列,4 通道隔离CAN 接口,支持CAN2.0A 和CAN2.0B 协议 |
||
|
三轴转台 |
有效负载:2kg; 角位置范围:360°连续旋转; 精度:0.05°; 角速率:0~40°/S。 |
||
|
大屏显示设备 |
75寸 |
三维视景显示 |
|
|
系统软件 |
主控软件 |
SimuRTS |
|
|
实时代码生成组件 |
RTSLink |
||
|
测试开发与执行软件 |
ETest |
||
|
实时仿真测试引擎 |
模型调度 |
||
|
三维视景驱动组件 |
飞行器姿态展示 |
09
应用领域
(1)无人机研发与测试
-
功能验证:模拟风干扰、力矩扰动等条件,测试飞控系统在起降、航线跟踪等模态下的稳定性。
-
故障注入测试:验证传感器失效(如陀螺仪故障)、通信中断时的容错控制能力,符合《多旋翼无人机飞行控制系统半实物仿真测试方法》团体标准要求。
-
集群协同仿真:支持多无人机编队控制算法的半实物验证,例如通过模拟通信延迟和定位误差评估协同任务可靠性。
(2) 航空航天飞行器研发与测试
-
舰载机着舰模拟:复现甲板运动、舰尾流等复杂环境,验证着舰引导与控制律的鲁棒性。
-
火箭飞控测试:在半实物平台上进行动态特性仿真、偏差适应性分析,支撑可重复使用火箭的快速迭代开发。
(3) 教学与科研
-
高校实验室:如某航空学院实验室配备无人机飞控半实物平台,用于学生开展飞控算法设计、硬件调试等实践课程。
-
科研创新:支持变构型飞行器、高超声速飞行器等前沿课题的控制律开发,例如通过半实物仿真验证跨域飞行时的主动流动调控效果。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐


 5
5 0
0- 0



 已为社区贡献5条内容
已为社区贡献5条内容

所有评论(0)