多步垂直泊车:Carsim 与 Simulink 联合仿真之旅
多步垂直泊车Carsim与simulink联合仿真 Carsim版本为2019 控制为mpc算法 规划为圆弧直线,用粒子群算法进行了优化
最近在研究多步垂直泊车的相关项目,用到了 Carsim 和 Simulink 进行联合仿真,这里和大家分享一下整个过程中的心得和体会。本次使用的 Carsim 版本是 2019 ,控制算法采用的是 MPC(Model Predictive Control,模型预测控制)算法,路径规划则是基于圆弧直线,并利用粒子群算法进行了优化。
一、为什么选择 Carsim 与 Simulink 联合仿真
Carsim 是一款专业的车辆动力学仿真软件,它能够提供非常精确的车辆动力学模型。而 Simulink 则是 MATLAB 下强大的系统级建模、仿真和分析平台,两者结合可以充分发挥各自的优势。在多步垂直泊车这样复杂的场景中,Carsim 负责车辆动力学部分的精确模拟,Simulink 则可以方便地搭建控制算法和路径规划模块,实现整个泊车系统的全面仿真。
二、MPC 控制算法实现
MPC 算法的核心思想是基于预测模型,通过滚动优化来求解最优控制序列。在 Simulink 中搭建 MPC 模块时,首先要定义系统的状态空间模型。例如,假设车辆的状态可以用位置 $(x, y)$、速度 $v$ 和航向角 $\theta$ 来表示,那么状态方程可以简单写成:
% 假设离散化时间步长为 dt
A = [1 0 dt*cos(theta) 0;
0 1 dt*sin(theta) 0;
0 0 1 0;
0 0 0 1];
B = [0 0;
0 0;
dt 0;
0 dt];这里 A 矩阵描述了系统状态随时间的转移关系,B 矩阵描述了控制输入对状态的影响。在每个控制周期内,MPC 算法会预测未来若干步的系统状态,并通过优化目标函数来求解最优的控制输入序列(如加速度 $a$ 和转向角 $\delta$)。目标函数通常包括跟踪误差和控制输入的变化率等项,以保证车辆既能准确跟踪期望路径,又能使控制输入平滑。
% 定义目标函数权重矩阵
Q = [10 0 0 0;
0 10 0 0;
0 0 1 0;
0 0 0 1];
R = [1 0;
0 1];Q 矩阵用于对状态跟踪误差进行加权,R 矩阵用于对控制输入变化率进行加权。权重的选择会直接影响 MPC 算法的性能,需要根据实际情况进行调整。
三、圆弧直线路径规划与粒子群优化
在多步垂直泊车中,路径规划采用圆弧直线的组合方式。圆弧用于车辆的转向,直线用于车辆的前进或后退。粒子群算法(PSO)则被用来对路径进行优化,以找到一条更优的泊车路径。
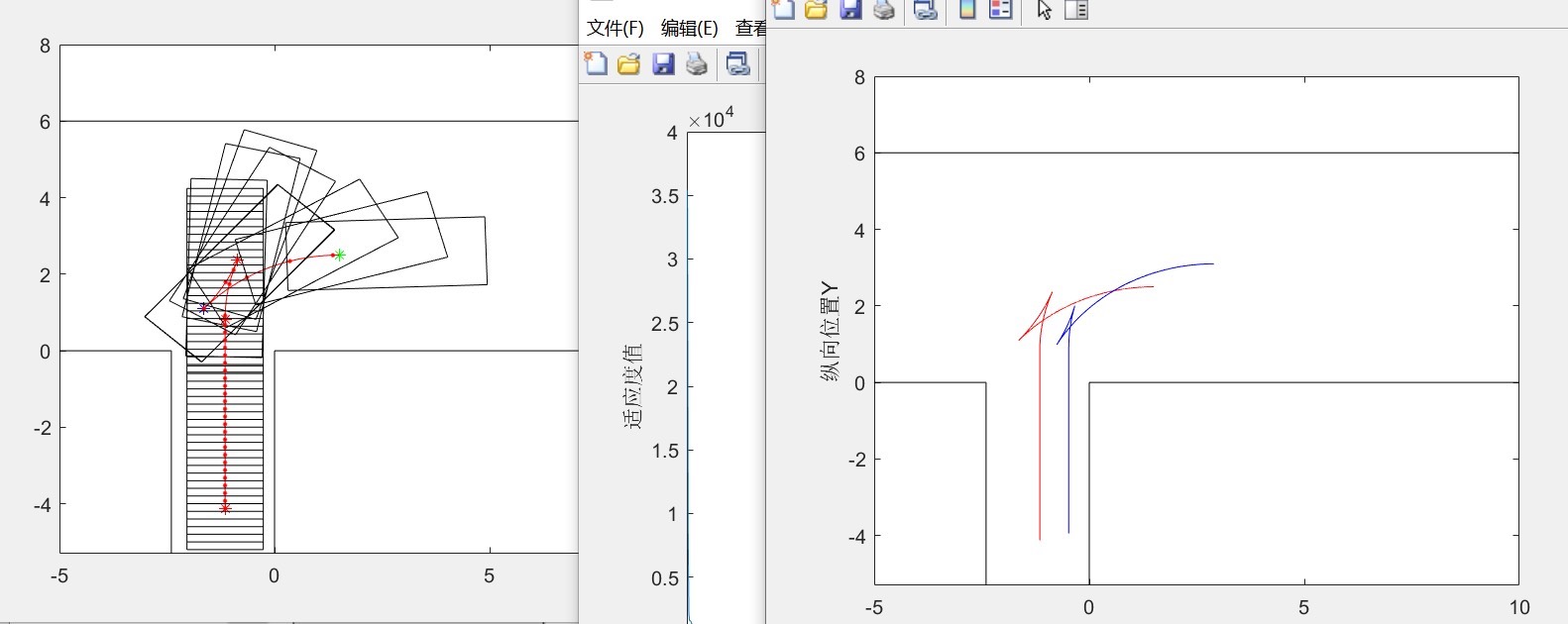
粒子群算法的基本思想是模拟鸟群觅食的行为,每个粒子代表一个可能的解(即一条路径),粒子在解空间中飞行,通过不断调整自己的位置来寻找最优解。在实现粒子群算法时,首先要初始化粒子的位置和速度。
% 初始化粒子群
num_particles = 50;
num_dimensions = 10; % 假设路径由 10 个参数描述
particles = rand(num_particles, num_dimensions);
velocities = zeros(num_particles, num_dimensions);每个粒子的位置对应路径的一些参数,比如圆弧的半径、圆心位置、直线的长度等。然后,在每次迭代中,粒子根据自己的历史最优位置和全局最优位置来更新速度和位置。
% 粒子群算法主循环
max_iterations = 100;
for iter = 1:max_iterations
for i = 1:num_particles
% 计算每个粒子的适应度(路径优劣程度)
fitness(i) = calculate_fitness(particles(i, :));
% 更新个体历史最优位置
if fitness(i) < pbest_fitness(i)
pbest_fitness(i) = fitness(i);
pbest_positions(i, :) = particles(i, :);
end
% 更新全局最优位置
if fitness(i) < gbest_fitness
gbest_fitness = fitness(i);
gbest_position = particles(i, :);
end
end
% 更新粒子速度和位置
for i = 1:num_particles
velocities(i, :) = w * velocities(i, :) +...
c1 * rand(1, num_dimensions).* (pbest_positions(i, :) - particles(i, :)) +...
c2 * rand(1, num_dimensions).* (gbest_position - particles(i, :));
particles(i, :) = particles(i, :) + velocities(i, :);
end
end这里 w 是惯性权重,c1 和 c2 是学习因子,它们的取值会影响粒子群算法的收敛速度和寻优能力。通过不断迭代,粒子群最终会找到一条相对较优的圆弧直线组合路径。
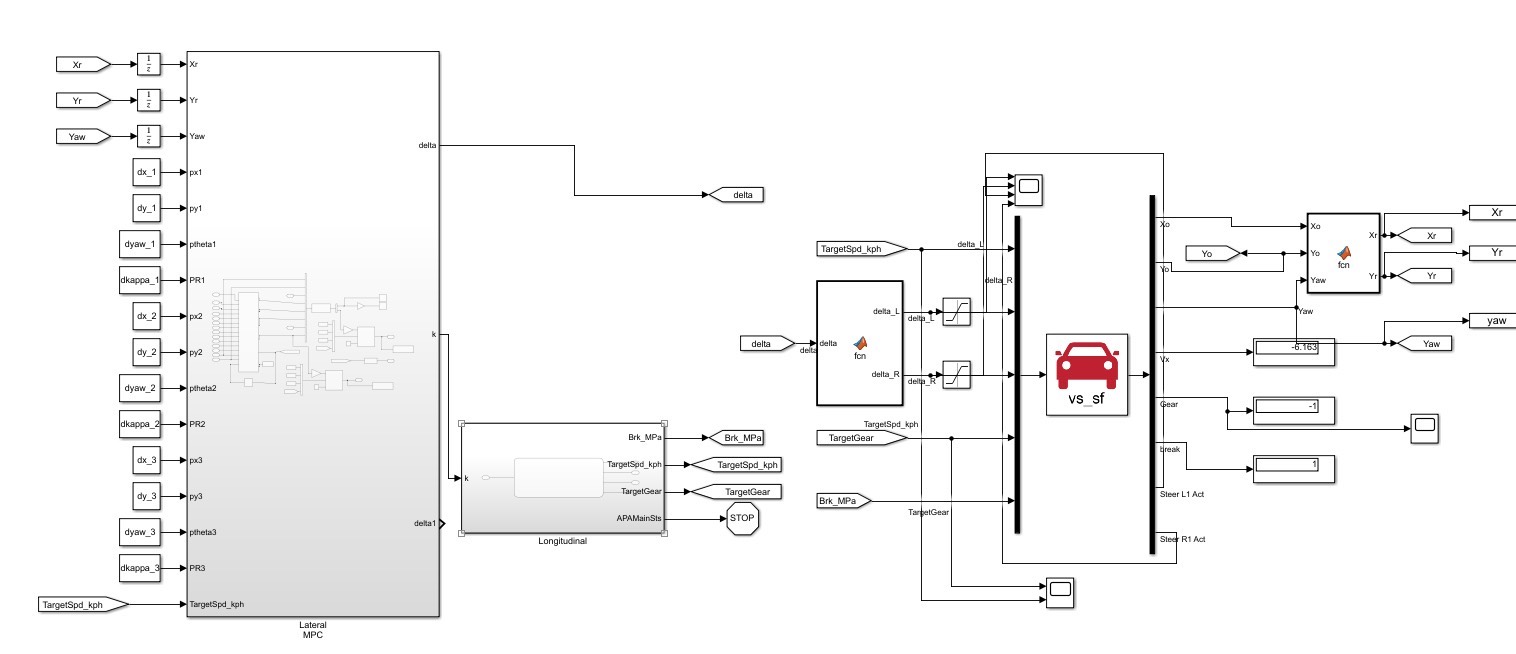
四、Carsim 与 Simulink 联合仿真设置
在 Carsim 2019 中,需要设置好车辆的基本参数,如质量、轴距、轮胎特性等,以保证车辆动力学模型的准确性。然后,通过 Carsim 提供的接口将车辆模型导入到 Simulink 中。在 Simulink 中,将 MPC 控制模块和优化后的路径规划模块与导入的 Carsim 车辆模型连接起来,形成完整的联合仿真模型。
多步垂直泊车Carsim与simulink联合仿真 Carsim版本为2019 控制为mpc算法 规划为圆弧直线,用粒子群算法进行了优化
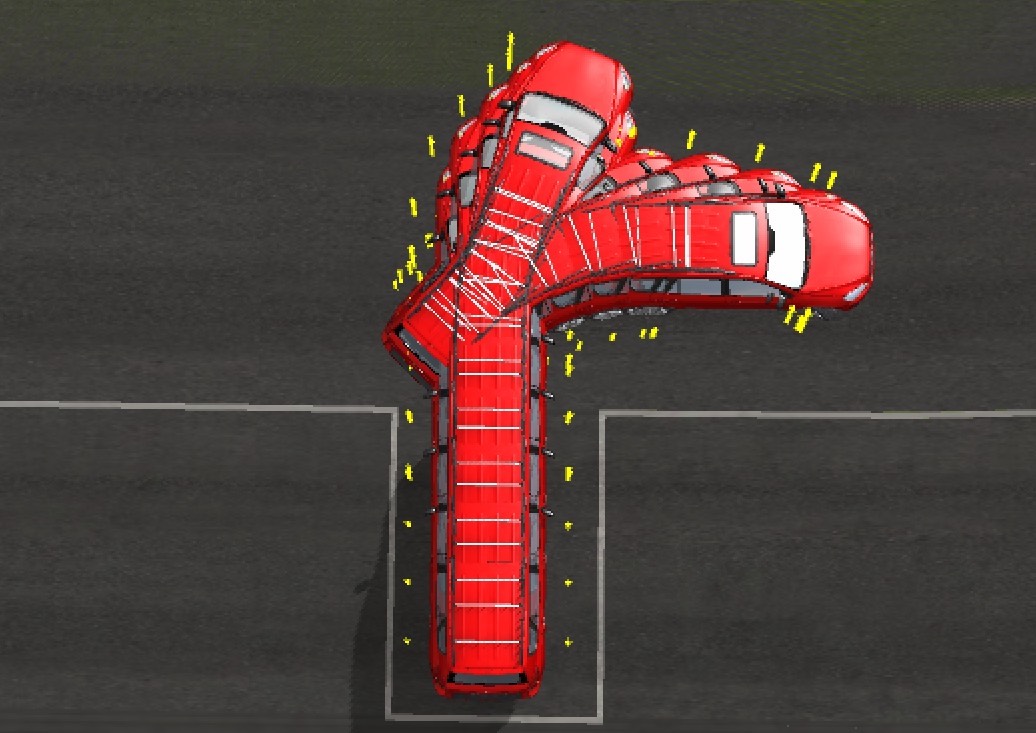
设置好仿真参数,如仿真时间、步长等,就可以运行联合仿真了。在仿真过程中,可以观察车辆的行驶轨迹、速度、加速度等参数的变化,以评估多步垂直泊车算法的性能。
通过这次多步垂直泊车的 Carsim 与 Simulink 联合仿真实践,深刻体会到了两者结合在车辆控制和路径规划研究中的强大之处。虽然过程中遇到了不少挑战,比如参数调整的复杂性,但通过不断尝试和优化,最终实现了较为理想的仿真效果。希望这篇博文能给同样在相关领域探索的小伙伴们一些启发。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐



 15
15 0
0- 0



 已为社区贡献52条内容
已为社区贡献52条内容

所有评论(0)