车辆主动悬架防侧翻控制:Simulink 与 Carsim 联合仿真之旅
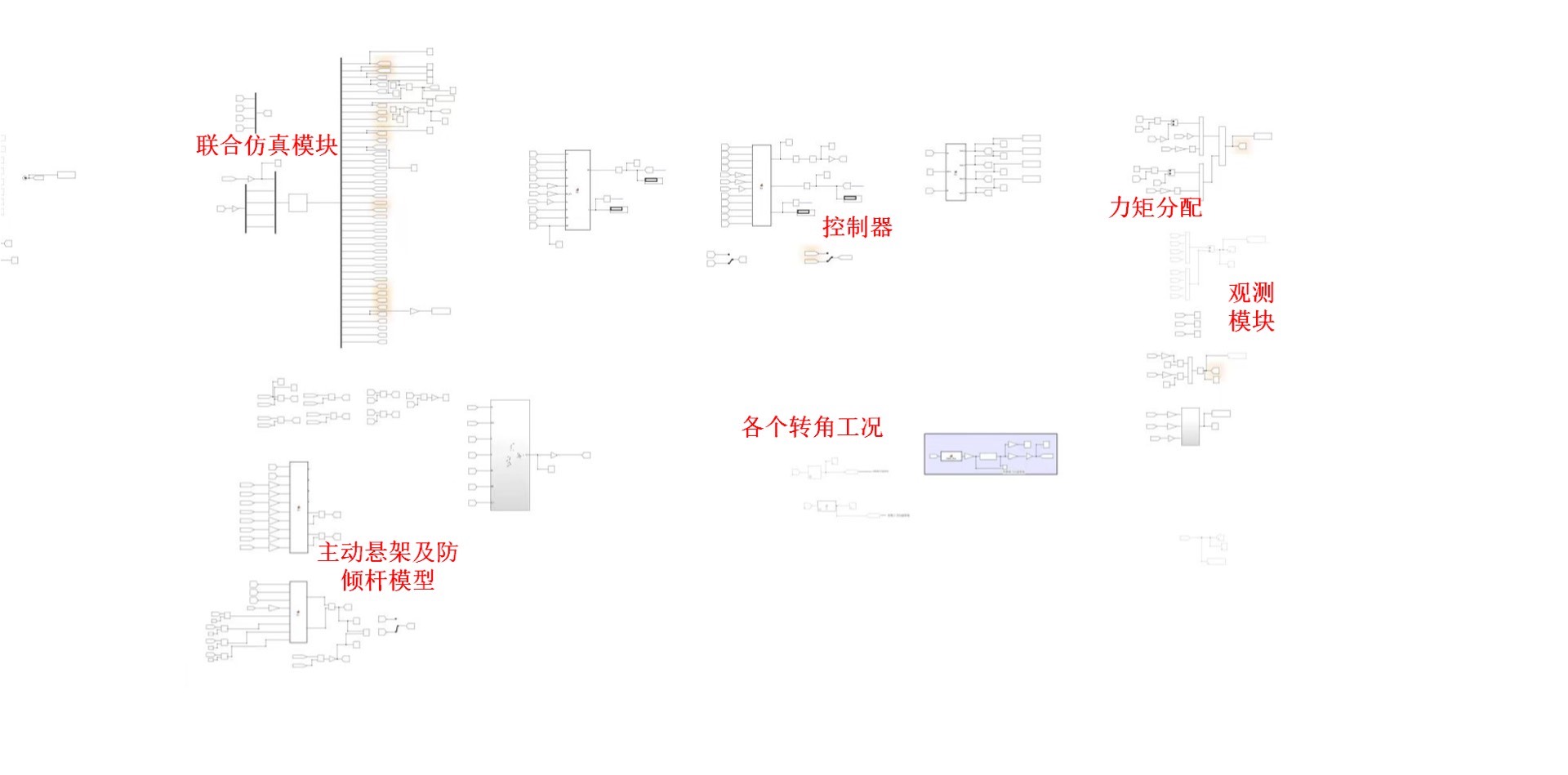
车辆主动悬架防侧翻控制 利用Simulink和Carsim进行联合仿真,搭建主动悬架以及防倾杆模型,在不同转角工况下进行仿真试验,设置滑模等控制器计算维持车辆侧倾稳定性所需的力矩,将力矩分配到各个悬架实现控制效果。 控制效果良好,保证运行成功。
在汽车工程领域,车辆的行驶稳定性至关重要,尤其是防止侧翻事故的发生。今天咱就唠唠如何利用 Simulink 和 Carsim 进行联合仿真,实现车辆主动悬架的防侧翻控制。
一、搭建模型
首先,要搭建主动悬架以及防倾杆模型。在 Simulink 中,我们可以充分利用其丰富的模块库来构建悬架系统。比如,使用机械连接模块来模拟悬架的物理连接,用弹簧 - 阻尼模块来模拟悬架的弹性和阻尼特性。
% 假设这里定义一些悬架参数
spring_constant = 1000; % 弹簧常数,单位 N/m
damping_coefficient = 50; % 阻尼系数,单位 N*s/m
% 这里简单示意弹簧力的计算
function spring_force = calculate_spring_force(displacement)
spring_force = spring_constant * displacement;
end
% 阻尼力计算
function damping_force = calculate_damping_force(velocity)
damping_force = damping_coefficient * velocity;
end上面这段代码,定义了弹簧常数和阻尼系数,这两个参数对于悬架的性能影响很大。calculatespringforce 函数根据位移计算弹簧力,calculatedampingforce 函数根据速度计算阻尼力。这些力在实际悬架系统中相互作用,影响车辆的行驶舒适性和稳定性。
而在 Carsim 中,它提供了非常专业的车辆动力学模型。我们可以在 Carsim 里设置车辆的各种参数,比如质量、轴距、轮胎特性等等。通过 Carsim 和 Simulink 的联合仿真接口,就能将这两个软件的优势结合起来,搭建出一个完整且精确的车辆模型。
二、不同转角工况下的仿真试验
接下来,就是在不同转角工况下进行仿真试验啦。这一步就像是给车辆设置各种 “弯道挑战”。在 Simulink 中,可以通过信号发生器模块来模拟不同的转角输入信号。
% 生成一个简单的正弦转角信号
t = 0:0.01:10; % 时间向量,从 0 到 10 秒,步长 0.01 秒
steering_angle = 0.1 * sin(2 * pi * 0.5 * t); % 幅值为 0.1 弧度,频率为 0.5Hz 的正弦信号
figure;
plot(t, steering_angle);
xlabel('时间 (s)');
ylabel('转角 (弧度)');
title('正弦转角输入信号');这段代码生成了一个简单的正弦转角信号,模拟车辆在行驶过程中的转向操作。通过改变幅值和频率,我们可以模拟不同的行驶工况,比如高速急转弯或者低速大转角等情况。在仿真试验中,观察车辆在这些不同转角输入下的响应,是评估主动悬架防侧翻控制效果的重要依据。
三、滑模等控制器的运用
为了维持车辆的侧倾稳定性,我们要用到滑模等控制器来计算所需的力矩。滑模控制是一种非线性控制策略,它对系统的参数变化和外部干扰具有很强的鲁棒性。
车辆主动悬架防侧翻控制 利用Simulink和Carsim进行联合仿真,搭建主动悬架以及防倾杆模型,在不同转角工况下进行仿真试验,设置滑模等控制器计算维持车辆侧倾稳定性所需的力矩,将力矩分配到各个悬架实现控制效果。 控制效果良好,保证运行成功。
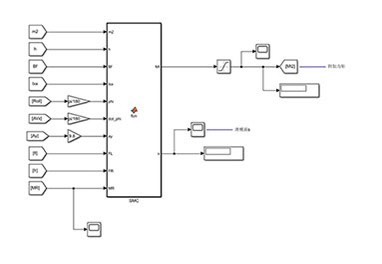
以滑模控制器为例,在 Simulink 中搭建滑模控制器模块时,关键在于定义滑动面和控制律。
% 假设这里有车辆的状态变量 x,包括侧倾角、侧倾角速度等
% 定义滑动面
function s = define_sliding_surface(x)
% 这里简单示意滑动面的定义,实际会更复杂
s = x(1) + 0.5 * x(2);
end
% 控制律计算
function control_input = calculate_control_law(s)
% 控制律也简单示意,实际要考虑更多因素
k = 10; % 控制增益
control_input = -k * sign(s);
end在 defineslidingsurface 函数中,定义了一个简单的滑动面,它是车辆状态变量的函数。而 calculatecontrollaw 函数根据滑动面的值计算控制输入,也就是所需的力矩。这里的控制增益 k 是一个关键参数,它的取值会影响控制效果的强弱。
计算出维持车辆侧倾稳定性所需的力矩后,就要将力矩分配到各个悬架上,从而实现控制效果。这一步需要根据车辆的结构和动力学特性,合理地将总力矩分配到前后左右四个悬架上。
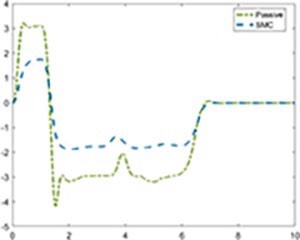
四、控制效果
经过一系列的仿真试验和控制器调试,最终的控制效果良好,保证了车辆运行的成功。在不同转角工况下,车辆的侧倾角度得到了有效的抑制,极大地提高了行驶安全性。通过观察仿真结果中的侧倾角度、侧向加速度等关键指标,可以直观地看到主动悬架防侧翻控制系统的有效性。
总之,利用 Simulink 和 Carsim 进行联合仿真,并结合滑模等控制器,为车辆主动悬架防侧翻控制提供了一个强大且有效的解决方案。希望这篇博文能给对汽车动力学控制感兴趣的小伙伴们一些启发。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐



 2
2 0
0- 0



 已为社区贡献43条内容
已为社区贡献43条内容

所有评论(0)