探索非线性电液伺服系统的模型自适应反步控制
非线性电液伺服系统模型自适应反步控制,考虑模型参数不确定性。 pdf教程+matlab/simulink源程序 s函数编写
在自动化控制领域,非线性电液伺服系统一直是个热门研究对象。今天咱们就聊聊它基于模型自适应反步控制,并且考虑模型参数不确定性的实现,还会涉及到相关的pdf教程以及Matlab/Simulink源程序里S函数编写。
非线性电液伺服系统的挑战
非线性电液伺服系统之所以复杂,就在于其模型参数往往具有不确定性。想象一下,在不同的工况、温度、压力等条件下,系统的参数会发生变化,这就像一个调皮的小精灵,总在你以为掌握它规律的时候突然变个模样。而传统的控制方法在面对这种不确定性时,常常会显得力不从心。
模型自适应反步控制来救场
模型自适应反步控制,是应对上述挑战的一把利器。它的核心思想是通过逐步构建李雅普诺夫函数,来设计控制器,使得系统能够在模型参数不确定的情况下依然稳定运行。咱们来看看一个简单的代码示例(以下代码仅为示意):
% 定义一些初始参数
dt = 0.01; % 时间步长
t = 0:dt:10; % 时间向量
x1 = zeros(size(t));
x2 = zeros(size(t));
u = zeros(size(t));
% 假设的系统参数
a = 1; % 这里假设的a参数可能存在不确定性
b = 2;
for k = 1:length(t)-1
% 构建虚拟控制律
alpha1 = -x1(k);
% 实际控制律
u(k) = (1/b)*( -a*x1(k) - x2(k) - alpha1);
% 系统状态更新
x1(k + 1) = x1(k) + dt * x2(k);
x2(k + 1) = x2(k) + dt * (a*x1(k) + b*u(k));
end在这段代码里,我们先设定了一些初始参数,像时间步长、时间向量以及状态变量的初始值。这里的 a 和 b 就是系统参数,其中 a 就模拟了具有不确定性的参数。在循环里,我们先构建了虚拟控制律 alpha1,它是基于当前的状态变量 x1 来设计的,目的是引导系统朝着期望的方向运行。然后通过实际控制律 u,结合系统参数和虚拟控制律,对系统进行控制。最后根据系统的动态方程更新状态变量 x1 和 x2。
Matlab/Simulink与S函数编写
为了更直观地观察和分析系统的运行,我们可以借助Matlab/Simulink。而S函数在其中起到了关键作用,它允许我们自定义复杂的控制算法。
首先,创建一个S函数模板。在Matlab命令行输入 sfuntmpl,就会生成一个基本的S函数框架。我们需要在这个框架里填充我们的控制算法代码。比如,上面实现的模型自适应反步控制算法就可以嵌入到S函数的 mdlDerivatives 或者 mdlOutputs 子函数里。
#include "simstruc.h"
#define A_PARAM (*(real_T *)ssGetSFcnParam(S,0))
#define B_PARAM (*(real_T *)ssGetSFcnParam(S,1))
#define X1 (*(real_T *)ssGetContStates(S))
#define X2 (*(real_T *)ssGetContStates(S)+1)
#define U (*(real_T *)ssGetInputPortSignal(S,0))
#define Y (*(real_T *)ssGetOutputPortSignal(S,0))
static void mdlOutputs(SimStruct *S, int_T tid)
{
real_T alpha1;
// 虚拟控制律
alpha1 = -X1;
// 实际控制律
U = (1.0/B_PARAM)*(-A_PARAM*X1 - X2 - alpha1);
// 输出可以是当前状态或者控制量等,这里简单返回控制量
Y = U;
}在这段C语言编写的S函数代码里,我们先通过 ssGetSFcnParam 获取在Simulink模型中设置的系统参数 APARAM 和 BPARAM,也就是前面Matlab代码里的 a 和 b。然后通过 ssGetContStates 获取系统的连续状态变量 X1 和 X2,通过 ssGetInputPortSignal 获取输入,通过 ssGetOutputPortSignal 设置输出。在 mdlOutputs 函数里,我们同样先构建虚拟控制律 alpha1,再计算实际控制律 U,最后将控制量作为输出 Y 返回。
非线性电液伺服系统模型自适应反步控制,考虑模型参数不确定性。 pdf教程+matlab/simulink源程序 s函数编写
至于相关的pdf教程,网上有不少优质资源。它们会从理论基础详细讲解非线性电液伺服系统、模型自适应反步控制的原理,再到Matlab/Simulink的操作步骤以及S函数编写的细节。大家可以通过学校图书馆资源、专业论坛或者学术数据库去获取。
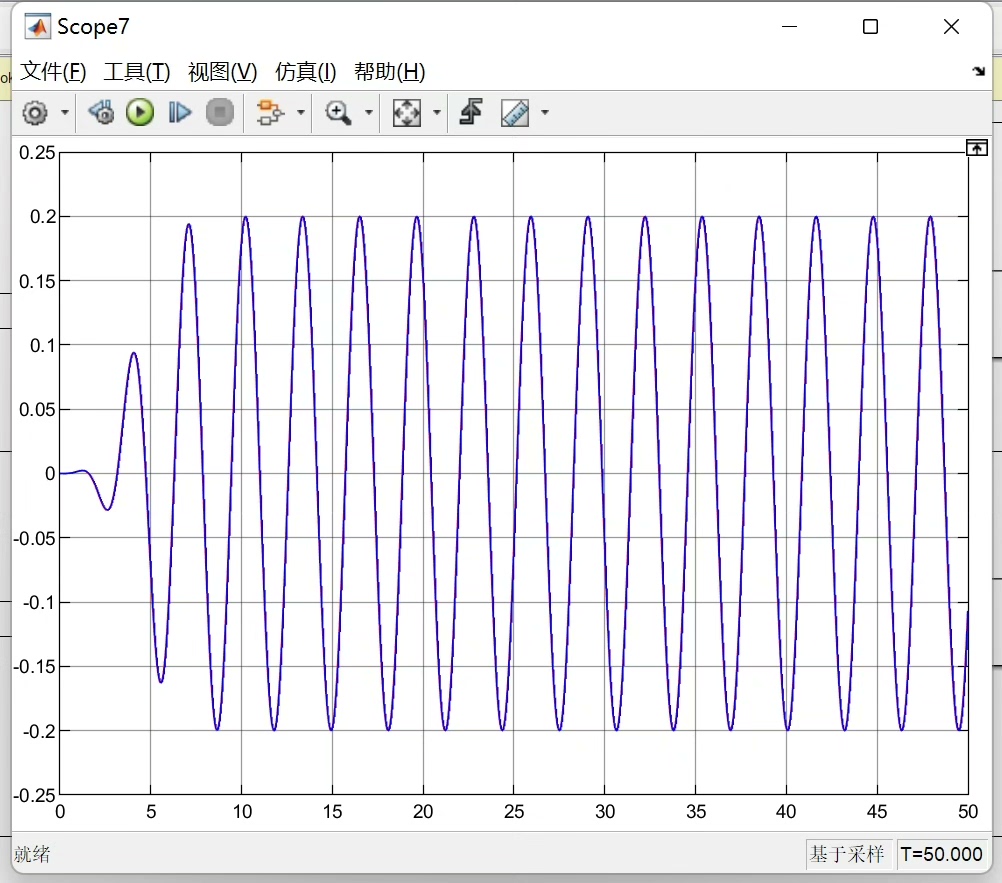
总之,通过模型自适应反步控制结合Matlab/Simulink以及S函数编写,我们能更好地应对非线性电液伺服系统模型参数不确定性的难题,为实际工程应用打下坚实基础。希望大家都能在这个有趣的领域里探索出属于自己的成果!

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐

 3
3 0
0- 0



 已为社区贡献18条内容
已为社区贡献18条内容

所有评论(0)