基于扩展反电动势的永磁同步电机无位置控制算法:全C语言编写,集成矢量控制与S-Function...
·
一种基于扩展反电动势的永磁同步电机无位置控制算法,全部C语言 编写,含有矢量控制大部分功能(弱磁,解耦,过调制,死区补偿等) 为了方便学习和工作,该产品结合S-Function进行仿真,且属于量产产品级,已经在多个项目中应用,并赠送多种无位置纯仿真模型(包含滑膜,高频注入,MRAS,龙贝格等)
该文档集围绕永磁同步电机(PMSM)无位置矢量控制(FOC)算法的C语言实现、调试准备及操作流程展开,核心内容可总结为以下四大模块:
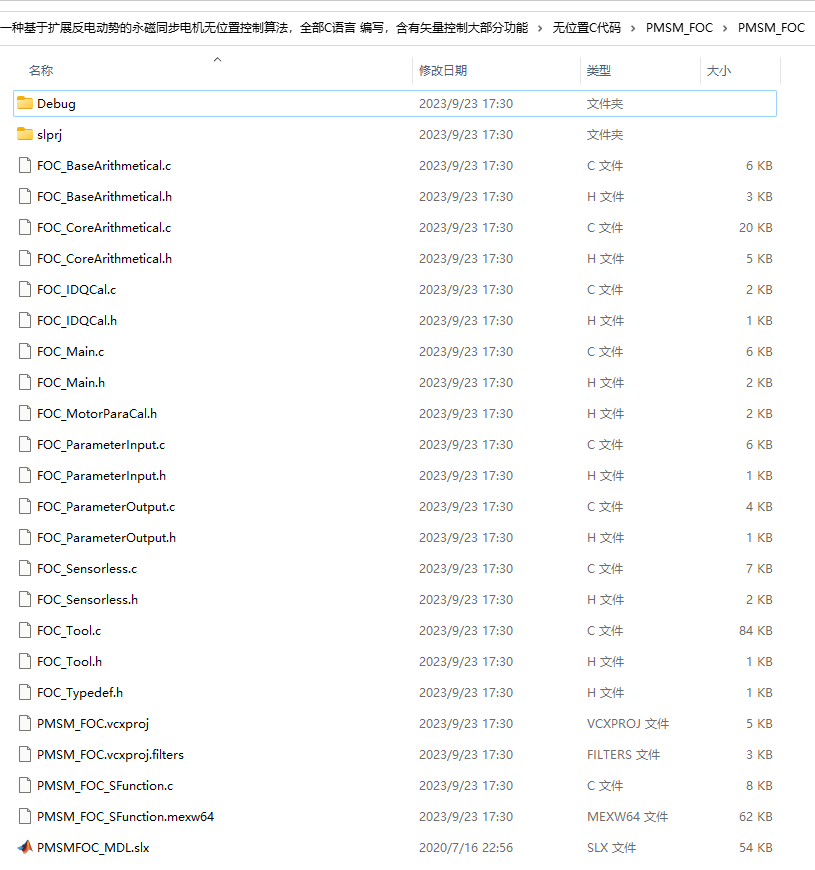
一、核心代码实现(无位置FOC算法)
- 基础算法模块:包含Clark/Park变换及逆变换(实现三相/两相、静止/旋转坐标系转换)、增量式/位置式PI调节器、一阶低通滤波、线性插值等基础工具函数,为矢量控制提供数学支撑。
- 核心控制模块:实现DQ轴解耦控制、弱磁控制(3种弱磁算法)、死区补偿(电压法+占空比法)、SVPWM调制(经典七段式/五段式、简易SVPWM及DPWM调制),支持过调制策略。
- 无位置观测模块:基于扩展反电动势的观测器核心,结合电流观测器与PLL锁相环,通过状态机实现电机启动(定位→开环→闭环)切换,支持开环/闭环角度融合。
- 参数计算与输出模块:包含直流电流、功率、扭矩、转子磁链估算,以及电机电参数(转速、电角度、母线电压)采集与处理。
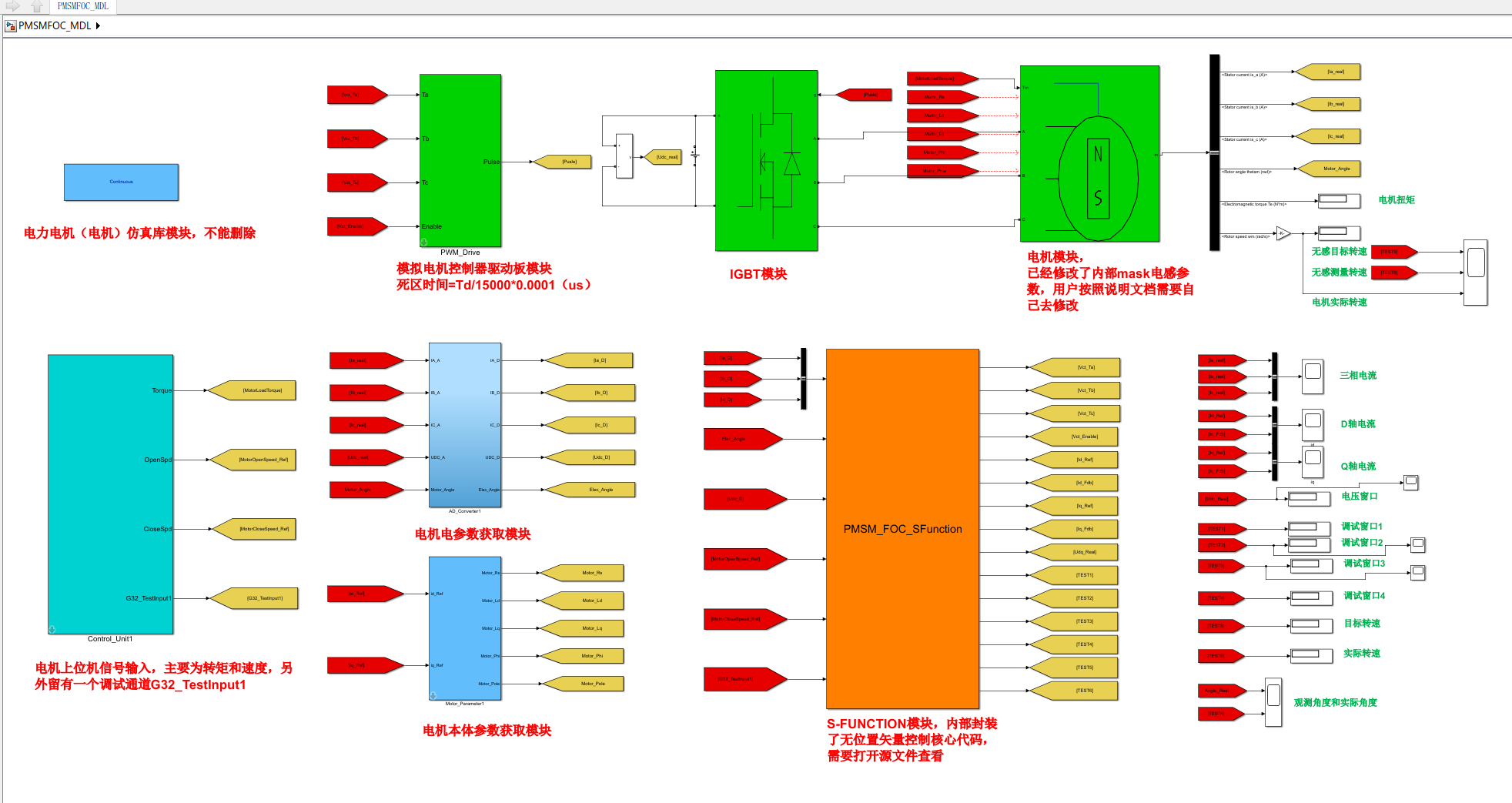
- 接口适配:提供MATLAB Simulink S函数接口(PMSMFOCSFunction.c),支持模型联合仿真,定义6路输入(三相电流AD值、电角度AD值等)和15路输出(PWM比较值、电流/转速反馈等)。
二、调试前准备
- 软件安装:
- 需安装MATLAB 2018b及以上版本,配套MinGW-w64 C/C++编译器(用于编译C代码)。
- 推荐安装Visual Studio 2012或Notepad++,方便代码编辑(工程基于VS2012创建)。 - 电机参数修改:
- 因实际电机Ld/Lq随电流变化(磁路饱和特性),需修改MATLAB电机库模型,替换固定电感为外部查表方式,涉及离散域电机模型、转矩/转速模式等6个模块的电压方程、转矩方程、运动方程重构。
- 配置核心参数:在FOCMotorParaCal.h中定义电机本体参数(定子电阻Rs、电感Ld/Lq、磁链Phi、极对数Pole),在FOCSensorless.h中配置无位置启动参数(定位时间、开环时间、斜坡系数等)。
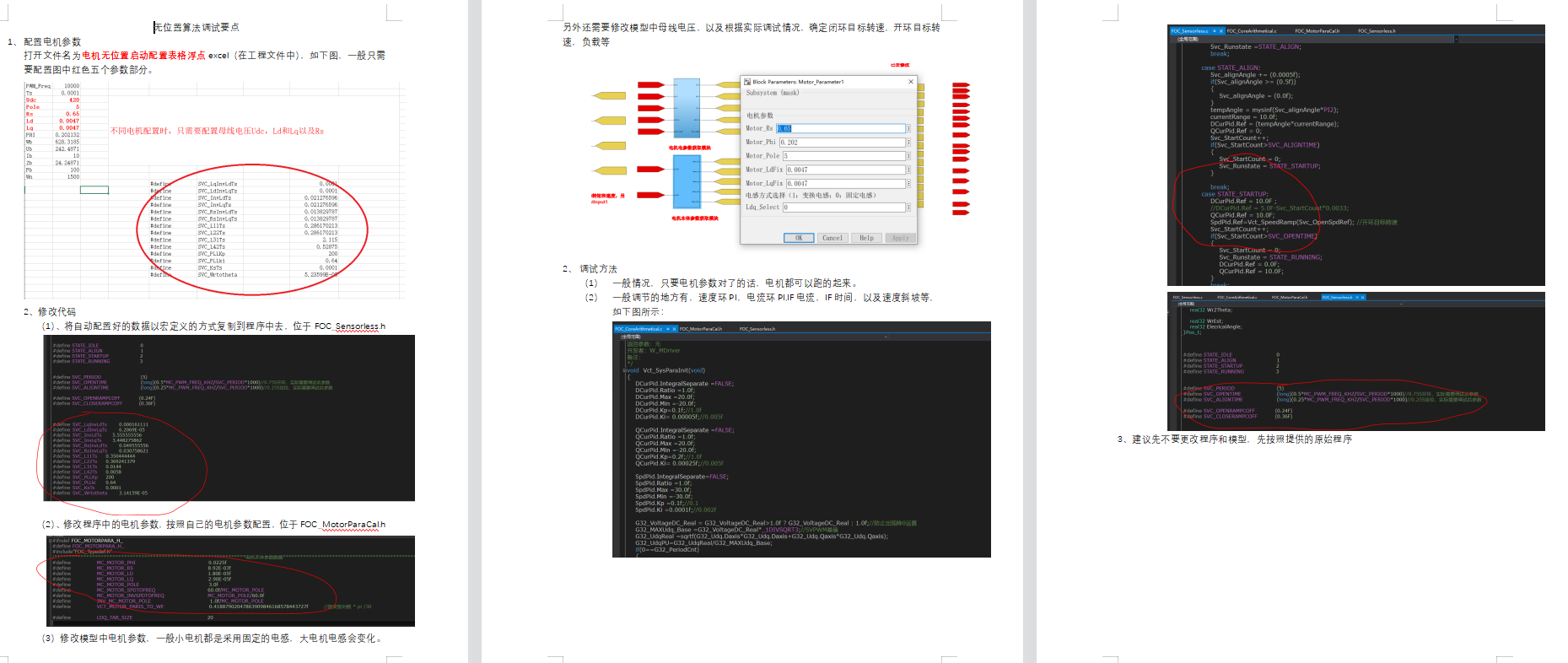
三、无位置调试要点
- 参数配置:通过Excel配置表格生成无位置算法关键参数(如观测器系数、PLL参数),以宏定义形式写入代码。
- 核心调节项:
- 控制环PI参数:电流环(DCurPid/QCurPid)、速度环(SpdPid)的Kp/Ki及输出限幅。
- 启动参数:定位电流、开环/闭环目标转速、速度斜坡系数(SVCOPENRAMPCOFF/SVCCLOSERAMPCOFF)。
- 其他:母线电压、负载设置,电感模式选择(固定/变换电感)。 - 调试流程:优先使用原始程序验证基础功能,再逐步优化参数,确保电机启动(定位→开环→闭环)平稳切换。
四、操作流程
- 打开MATLAB 2018b,设置工程文件路径(包含.slx模型、C代码、头文件)。
- 确认电机参数、无位置算法参数已按实际电机配置完成。
- 运行Simulink模型(PMSMFOC_MDL.slx),通过S函数调用C语言核心算法,实现无位置矢量控制仿真。
- 查看输出结果(PWM占空比、电流/转速反馈、电机电角度等),根据调试效果优化PI参数及启动配置。
一种基于扩展反电动势的永磁同步电机无位置控制算法,全部C语言 编写,含有矢量控制大部分功能(弱磁,解耦,过调制,死区补偿等) 为了方便学习和工作,该产品结合S-Function进行仿真,且属于量产产品级,已经在多个项目中应用,并赠送多种无位置纯仿真模型(包含滑膜,高频注入,MRAS,龙贝格等)


AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐



 5
5 0
0- 0



 已为社区贡献29条内容
已为社区贡献29条内容

所有评论(0)