IMMD混联混动仿真模型:基于Cruise与Simulink的P1+P3架构策略详解** 注...
cruise混动仿真模型(immd) IMMD架构混联混动仿真模型,P1+P3架构,混联混动汽车动力性经济性仿真。 内容包括cruise模型,simulink策略,策略文件说明(19页) 关于模型 1.本模型是基于IMMD架构搭载的混联混动仿真模型。 模型是基于cruise/simulink搭建的base模型,策略模型基于MATLAB/Simulink平台搭建完成,通过C++编译器编译成dll文件给CRUISE引用,实现联合仿真。 2.尽可能详细的描写了策略说明,大约19页左右,主要解释策略搭建逻辑及各模式间的转换。 3.模型主要供学习使用,不同的车型控制策略必然不同,具体车型仿真任务请根据需求自行变更模型。 使用模型前请确保有相应软件基础,卖的是模型,不是软件教程。 5.提供所有相关文件。 包含:cruise模型、simulink策略模型、策略说明文档。 6.DLL文件使用64位编译器编译,如出现无策略文件提示,请在模型界面选择“options→layout→platform→WIN64”;如仍不能运行,请检查模型目录是否存在中文字符。 7.确认有需求再买
搞懂IMMD混动仿真:从Cruise模型到策略代码实战
混动车动力系统的核心难题之一,是如何在发动机和电机之间实现高效协同。IMMD(Intelligent Multi-Mode Drive)架构作为本田的招牌混联方案,凭借P1+P3双电机布局,在动力分流和能量回收上玩出了花样。但仿真模型到底怎么搭?策略逻辑如何落地?今天拆解一个基于Cruise和Simulink的IMMD仿真模型,带你看懂背后的代码细节。
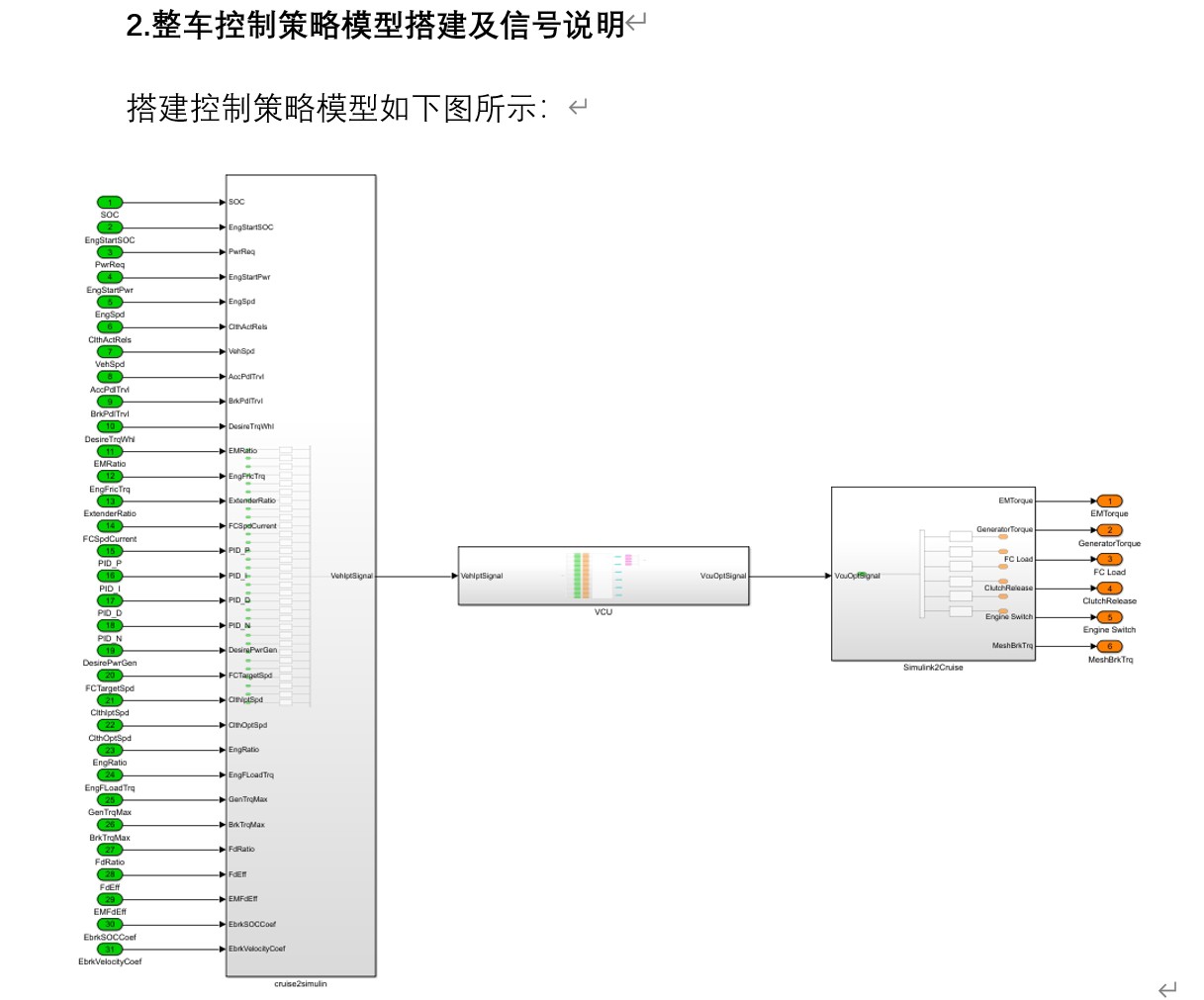
**模型架构:Cruise和Simulink怎么联动?**
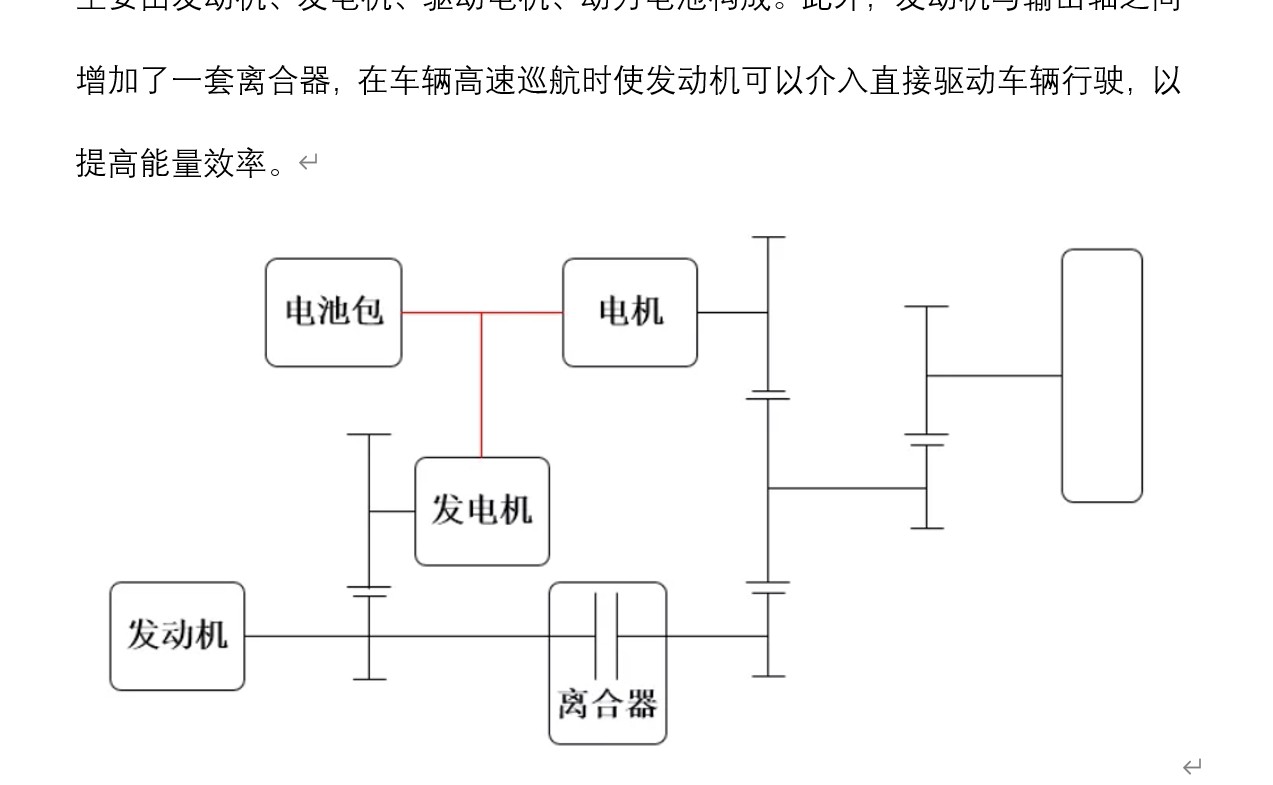
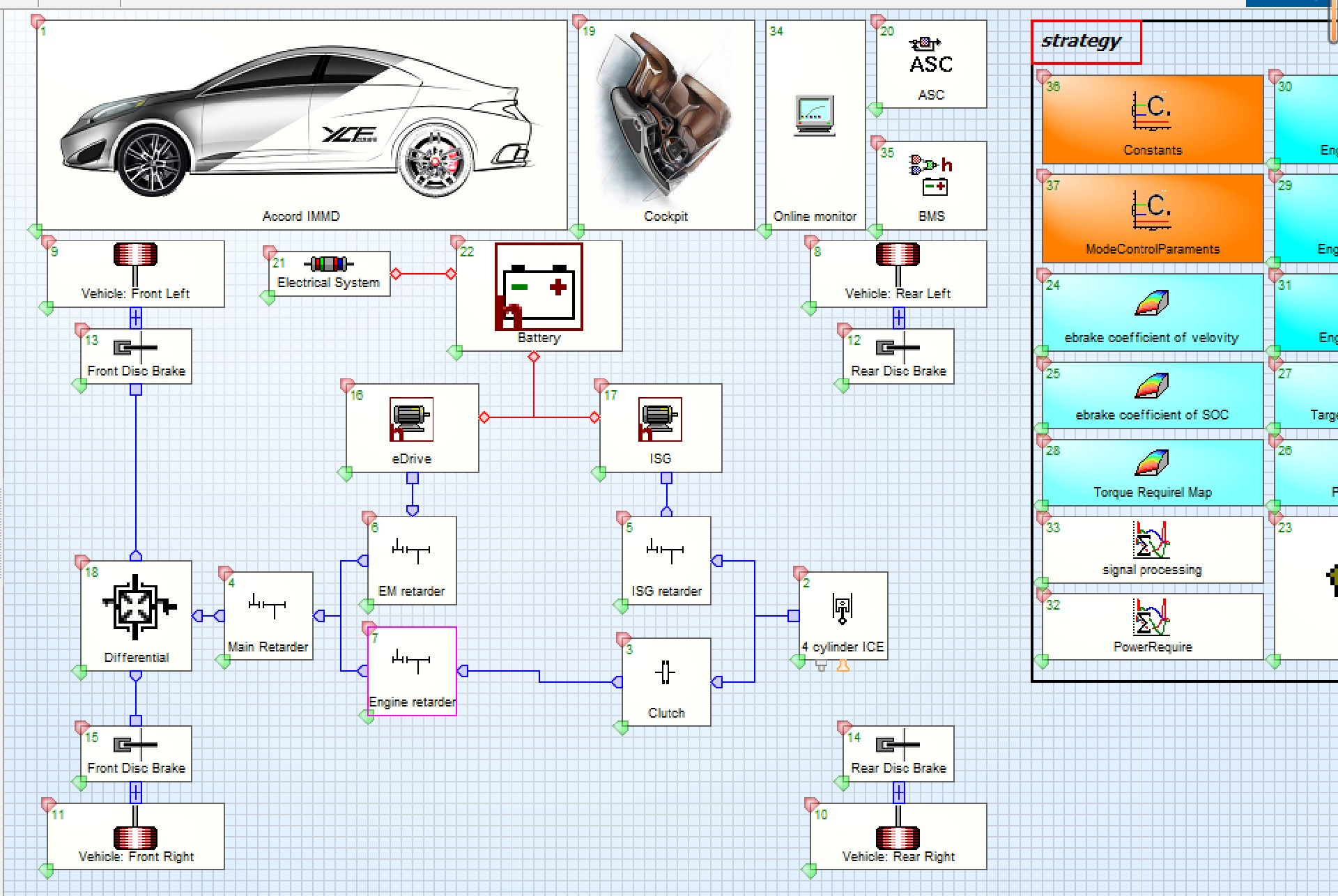
IMMD模型的骨架在Cruise里搭建,包含发动机、P1电机(发电)、P3电机(驱动)、电池以及传动系统。但真正的“大脑”藏在Simulink里——控制策略通过C++编译器打包成DLL,被Cruise实时调用。这种联合仿真的优势在于,既能利用Cruise的车辆动力学精度,又能灵活迭代控制算法。
cruise混动仿真模型(immd) IMMD架构混联混动仿真模型,P1+P3架构,混联混动汽车动力性经济性仿真。 内容包括cruise模型,simulink策略,策略文件说明(19页) 关于模型 1.本模型是基于IMMD架构搭载的混联混动仿真模型。 模型是基于cruise/simulink搭建的base模型,策略模型基于MATLAB/Simulink平台搭建完成,通过C++编译器编译成dll文件给CRUISE引用,实现联合仿真。 2.尽可能详细的描写了策略说明,大约19页左右,主要解释策略搭建逻辑及各模式间的转换。 3.模型主要供学习使用,不同的车型控制策略必然不同,具体车型仿真任务请根据需求自行变更模型。 使用模型前请确保有相应软件基础,卖的是模型,不是软件教程。 5.提供所有相关文件。 包含:cruise模型、simulink策略模型、策略说明文档。 6.DLL文件使用64位编译器编译,如出现无策略文件提示,请在模型界面选择“options→layout→platform→WIN64”;如仍不能运行,请检查模型目录是否存在中文字符。 7.确认有需求再买
举个栗子,Cruise中设置的电机扭矩指令,实际来自Simulink策略中的这段逻辑:
% 驱动模式切换判断
if Battery_SOC > 0.3 && Vehicle_Speed < 70
Mode = 'EV'; % 纯电模式,P3电机驱动
else
Mode = 'Hybrid'; % 混动模式,发动机+P3
end 这段代码看似简单,但实际策略文档里会详细定义SOC阈值、车速滞回区间,甚至考虑电池温度补偿。EV模式和Hybrid模式的切换如果出现抖动,八成是这里的判断条件没加滤波。
**策略核心:模式切换的“红绿灯”逻辑**
IMMD的策略文档里反复提到一个词:状态机。混动系统的工作模式(EV、混动、充电、再生制动)就像十字路口的车道,状态机就是交警,决定什么时候变道。
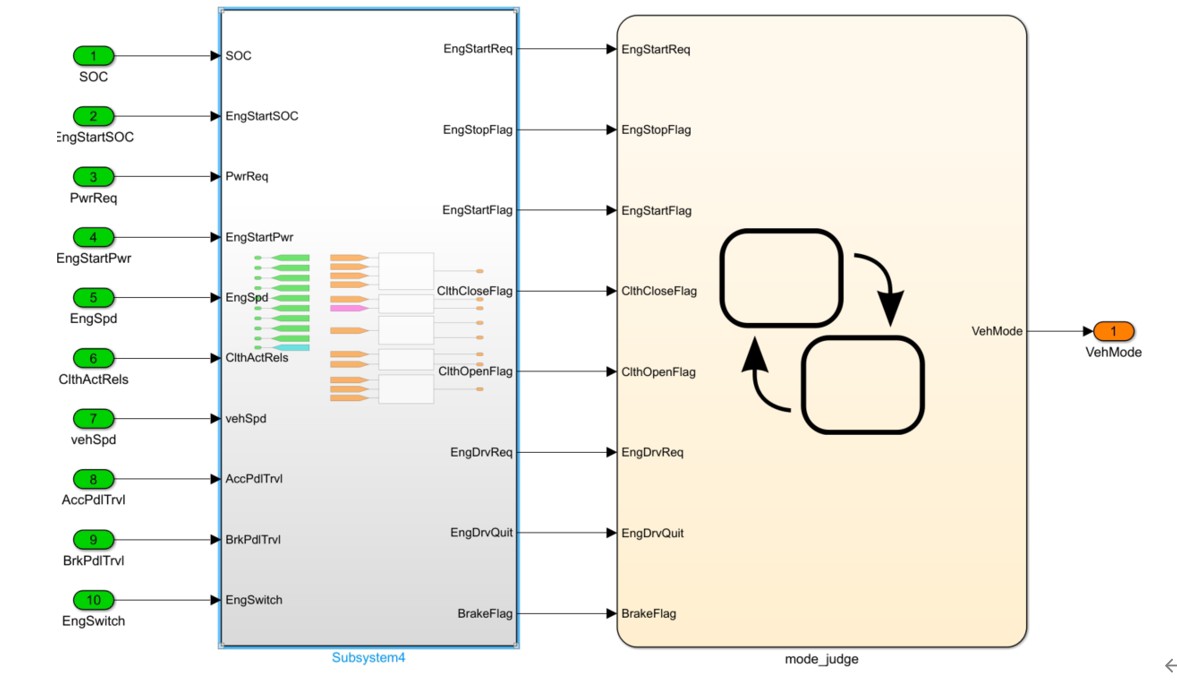
来看Simulink中的一个状态机片段(简化版):
function Mode = fsm(Engine_Status, Motor_Torque, Battery_SOC)
persistent Current_Mode;
if isempty(Current_Mode)
Current_Mode = 'EV';
end
switch Current_Mode
case 'EV'
if Battery_SOC < 0.25 || Motor_Torque > 150
Current_Mode = 'Hybrid'; % SOC过低或扭矩需求大,切混动
end
case 'Hybrid'
if Battery_SOC > 0.8 && Motor_Torque < 80
Current_Mode = 'EV'; % 高SOC且低负载,切EV
end
end
Mode = Current_Mode;
end 这个状态机的坑在于切换延迟。比如从Hybrid回EV时,如果立刻切断发动机,可能导致扭矩突变。文档里会强调在状态切换时加入过渡阶段,比如让发动机逐步降扭,同时P3电机补足扭矩缺口。
**避坑指南:DLL编译和路径玄学**
模型跑不起来?先检查这两处:
- 64位DLL兼容性:Cruise默认可能调用32位编译器,需要在菜单里手动切到WIN64(Options→Layout→Platform→WIN64)。
- 中文路径报错:仿真行业祖传规矩——路径里别出现中文!哪怕只有一个“桌面”文件夹,也可能让DLL加载失败。
如果Simulink策略修改后重新编译失败,八成是环境变量没设对。比如用MinGW编译器时,记得在MATLAB里执行:
setenv('MW_MINGW64_LOC', 'C:\MinGW') % 你的编译器路径
mex -setup C++ **模型能干啥?不能干啥?**
这个模型的最大价值在于快速验证算法。比如想测试新的扭矩分配策略,直接改Simulink里的电机扭矩MAP就行:
% 扭矩分配算法(混动模式)
Motor_Torque = Total_Demand * 0.7; % P3承担70%
Engine_Torque = Total_Demand * 0.3; % 发动机承担30% 但注意!车型差异会导致参数失效。比如同样的策略用在轴距更长的车上,可能因为质量分布变化导致轮端扭矩需求不同。这时候需要调的不是代码逻辑,而是Cruise里的整车参数。
**最后的小建议**
别急着买模型!先问自己三个问题:
- 是否已经摸透Cruise的基础操作(比如工况设置、信号映射)?
- 是否需要二次开发策略(比如自定义能量管理算法)?
- 电脑配置是否扛得住联合仿真(尤其电池模型上电芯细节时)?
如果答案都是Yes,这个模型会成为你理解混动策略的跳板;如果还在犹豫,不妨先从策略文档入手——那19页的说明,足够让你看清IMMD的控制哲学了。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐


 2
2 0
0- 0



 已为社区贡献9条内容
已为社区贡献9条内容

所有评论(0)