【MATLAB例程】基于最近邻启发式策略的垃圾回收任务分配,生成多辆运输车辆的路线,例程已调通

用于求解具有车辆容量约束的路径规划问题(Vehicle Routing Problem, VRP)。在给定垃圾处理厂位置、垃圾收集点空间分布以及车辆最大载重的条件下,通过启发式路径构造方法,为多辆运输车辆生成合理的运输路线,使所有垃圾点的垃圾被收集并最终返回处理厂,同时尽量减少运输总距离。
程序详解
基于最近邻启发式策略的垃圾运输路径规划算法的MATLAB仿真代码,用于求解具有车辆容量约束的路径规划问题( V e h i c l e R o u t i n g P r o b l e m , V R P Vehicle Routing Problem, VRP VehicleRoutingProblem,VRP)。在给定垃圾处理厂位置、垃圾收集点空间分布以及车辆最大载重的条件下,通过启发式路径构造方法,为多辆运输车辆生成合理的运输路线,使所有垃圾点的垃圾被收集并最终返回处理厂,同时尽量减少运输总距离。
程序设计流程:在二维平面区域内随机生成若干垃圾收集点,并为每个节点随机分配一定数量的垃圾量。车辆从垃圾处理厂出发,按照**最近邻策略(Nearest Neighbor Heuristic)**选择当前距离最近且满足剩余载重约束的垃圾收集点进行访问。当车辆达到容量上限或不存在可访问节点时,车辆返回处理厂完成一次运输任务,然后派出下一辆车继续执行收集任务,直到所有垃圾点被访问。
通过该仿真,可以分析垃圾运输系统中的车辆调度与路径规划问题,并为进一步研究更复杂的车辆路径优化算法(如遗传算法、蚁群算法等)提供基础仿真平台。
完整代码运行结果
分配结果图: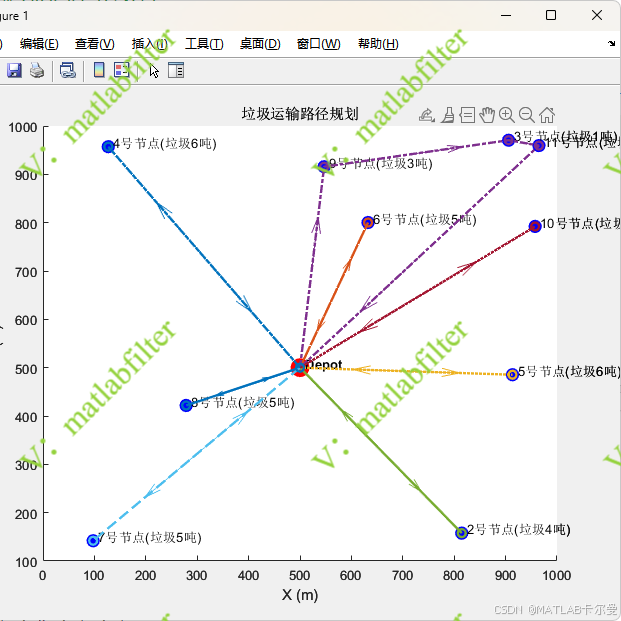
命令行窗口显示的分配结果: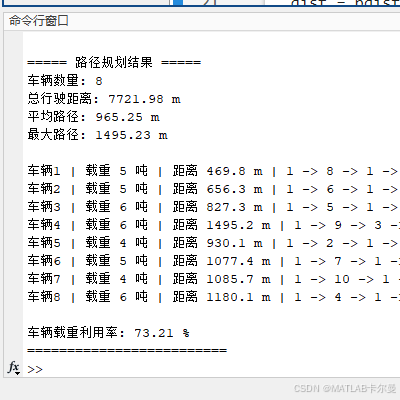
MATLAB源代码
% 基于分批运输与最近邻优化的垃圾运输路径规划
% 作者:matlabfilter
% 2026-03-12/Ver1
clear;clc;close all;
rng(0)
%% 参数
n = 10; % 垃圾点
Q = 7; % 最大载重
area = 1000; % 区域
x = rand(n,1)*area;
y = rand(n,1)*area;
d = randi([1,6],n,1);
% 处理厂
x = [area/2;x];
y = [area/2;y];
d = [0;d];
N = length(x);
dist = pdist2([x y],[x y]);
本例程之展示部分代码,例程的作用是提供一个大框架,如果有需要,或需要帮忙修改为自己想要的代码,可以联系我

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐
 8
8 0
0- 0



 已为社区贡献35条内容
已为社区贡献35条内容

所有评论(0)