ELF_RV1126B开发板AI部署实例(以yolo8目标检测为例)--虚拟机格式转化,环境安装与推理
1安装基础开发背景工具
1.1核心功能接口
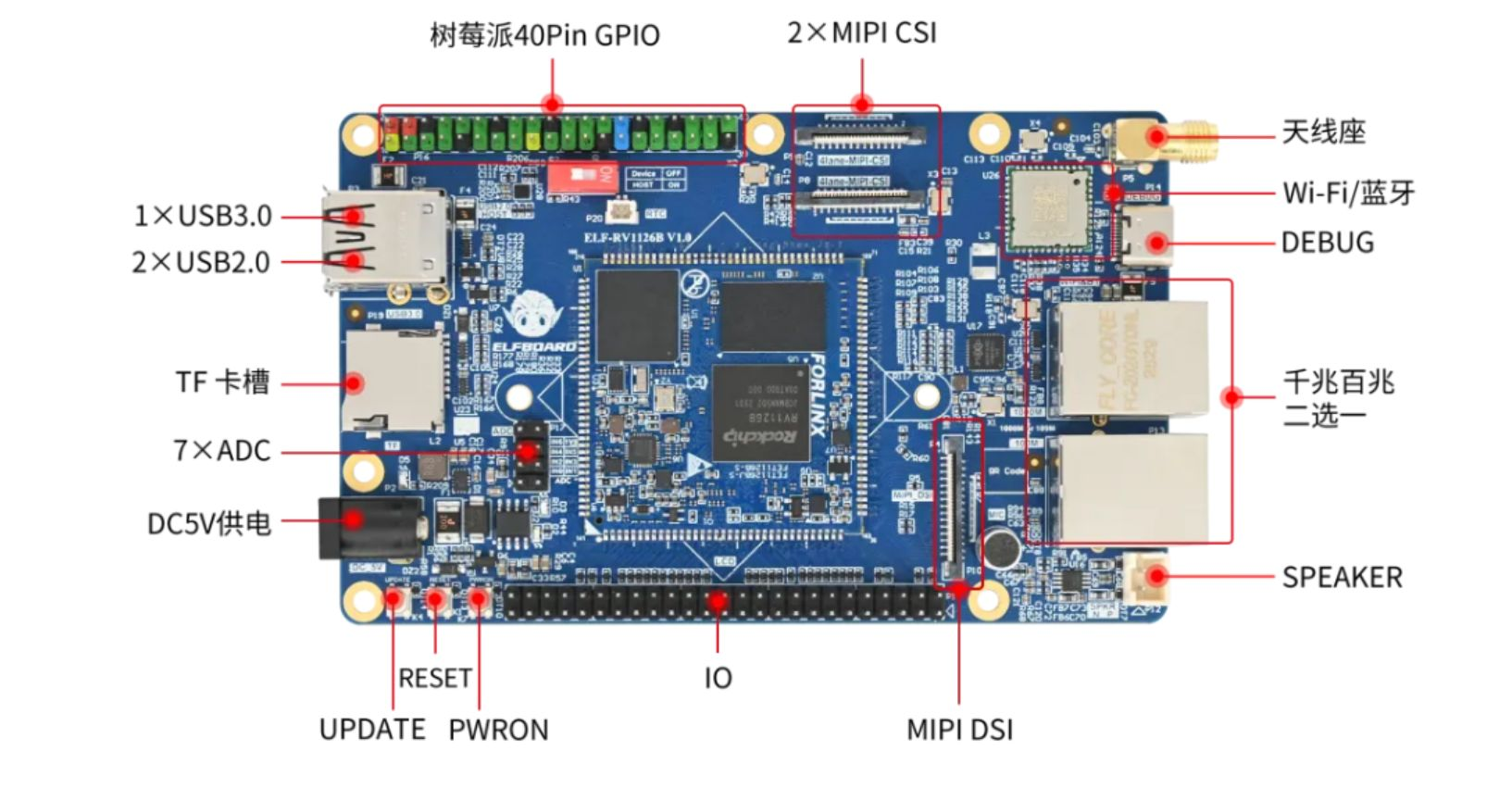
DC5V供电
使用 5V/2A 或更高电流 的DC电源适配器(内正外负最常见,请务必确认)插入此接口。上电前请确保其他接线正确,尤其是调试串口。
程序与调试接口
这些接口用于系统烧录、登录终端和传输文件,是软件开发的核心,标有TXD, RXD, GND
USB2.0 OTG (左上角,Type-C口)
用于通过工具向开发板烧写系统镜像。使用Type-C数据线连接电脑。烧录时通常需要让板子进入Loader模式。
USB3.0 HOST (左上角,蓝色Type-A口)
连接USB外设U盘、键盘、鼠标、USB摄像头,直接将U盘等设备插入。这是将 .rknn模型文件和测试图片传输到开发板最便捷的方式。
上电流程
连接 DC5V供电,连接 调试串口 到电脑,并打开串口终端软件准备观察日志。给开发板上电,在串口终端中查看启动日志,系统启动后,输入用户名密码登录系统,将虚拟机中转换好的best.rknn模型文件和测试图片bus.jpg拷贝到U盘,插入开发板的 USB3.0 HOST 口,在开发板终端中挂载并复制文件,在开发板终端中,安装rknn-toolkit2-lite等Python包。
1.2Miniconda3安装配置
在浏览器中进入清华镜像源网站(https://mirrors.tuna.tsinghua.edu.cn/anaconda/miniconda/)
下载对应的Miniconda3版本,注意下载版本必须为Linux安装包
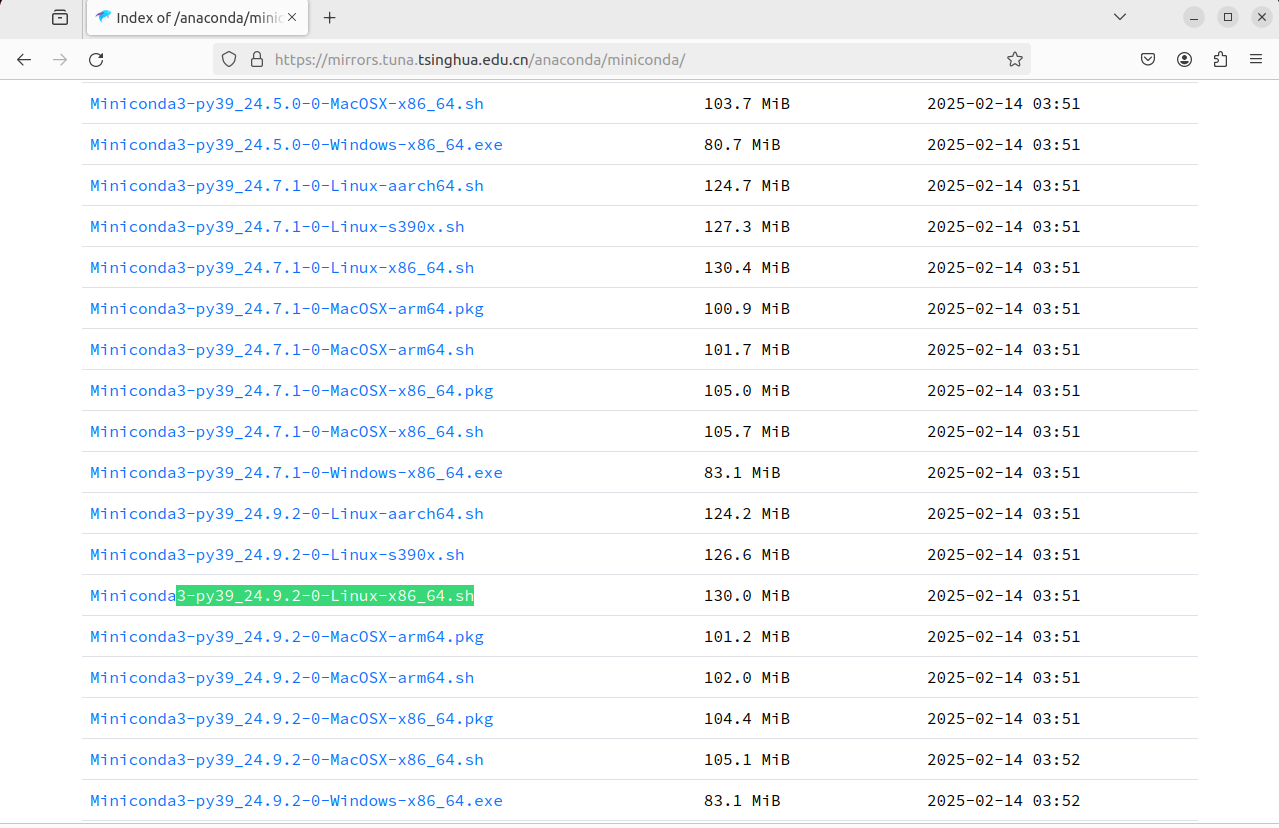
然后找到所下载文件的目录,必须要在下载文件的目录下执行,同时需要给所安装执行这个安装脚本的权限。需要给它添加可执行权限,否则直接运行脚本可能会报错。
# 给予脚本可执行权限
chmod +x Miniconda3-py39_24.9.2-0-Linux-x86_64.sh
# 再次运行脚本
./Miniconda3-py39_24.9.2-0-Linux-x86_64.sh开始安装后可以一直按(Enter)键,也可按Q跳过条款阅读,紧接着输入yes接受使用条款,在接受条款之后可以直接按(Enter)键使用默认路径进行安装。
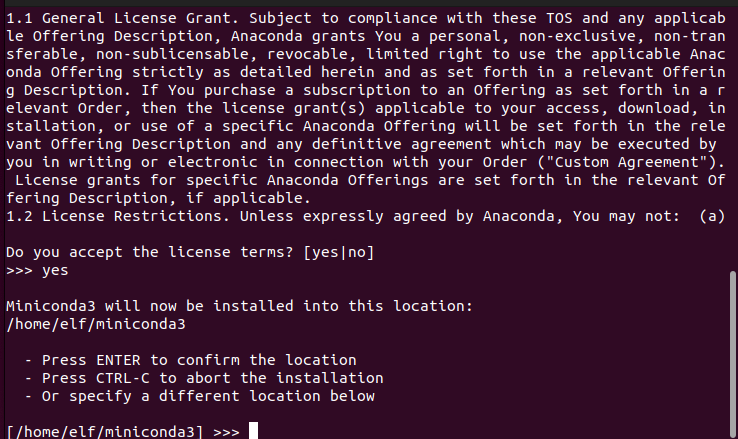
之后进行一路yes即可,安装完成后使用 conda --version 命令来进行查看安装的conda版本![]()
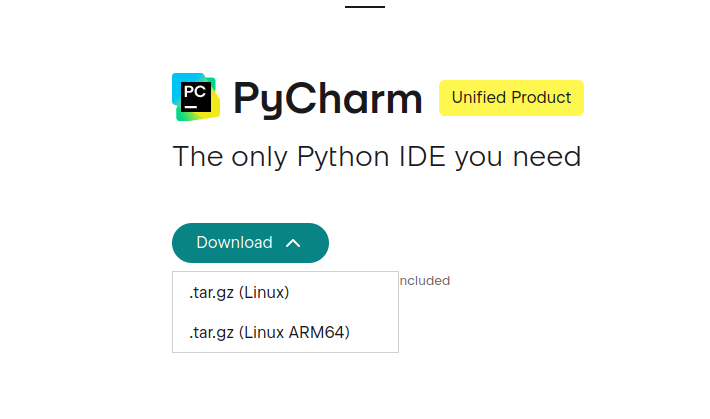
1.3 PyCharm安装
使用浏览器进入Pycharm官网(https://www.jetbrains.com/pycharm/download/?section=linux)下载页面,下载选择Linux安装包
点击下载,然后下载完成后它会是一个压缩,可以对压缩包直接右键进行解压,可能会存在报错问题,可在终端输入命令 tar -xzvf pycharm-2025.3.3.tar.gz(注意文件名的版本号会有不同,你要根据你下载的版本进行更改)我这里用的是pycharm-2025.3.3.tar.gz

在安装完成后输入命令进入解压后产生的Pycharm目录,注意要修改你所安装的pycharm版本号,需要与你所下载的一致。
cd pycharm-2025.3.3/进入目录后会有如下的前缀
![]()
进入目录后输入运行启动脚本,即可进入Pycharm
./bin/pycharm.sh1.4安装YOLOv8和依赖库
特别注意,这里安装YOLO并不能直接pip install ultralytics,我们这里使用瑞芯微官方提供的仓库airockchip/ultralytics_yolov8,我们直接拉取https://github.com/airockchip/ultralytics_yolov8仓库到我们的项目中
# 使用完整的地址执行克隆命令
git clone https://github.com/airockchip/ultralytics_yolov8.git在终端中会出现如下的下载,等待它下载完成
在目录下新建一个名为requirements.txt的文本,这个是必须文件,内容直接照如下拷贝即可:
# Ultralytics requirements
# Usage: pip install -r requirements.txt
# Base ----------------------------------------
matplotlib>=3.2.2
numpy>=1.22.2 # pinned by Snyk to avoid a vulnerability
opencv-python>=4.6.0
pillow>=7.1.2
pyyaml>=5.3.1
requests>=2.23.0
scipy>=1.4.1
torch>=1.7.0
torchvision>=0.8.1
tqdm>=4.64.0
# Logging -------------------------------------
# tensorboard>=2.13.0
# dvclive>=2.12.0
# clearml
# comet
# Plotting ------------------------------------
pandas>=1.1.4
seaborn>=0.11.0
# Export --------------------------------------
# coremltools>=7.0.b1 # CoreML export
onnx>=1.12.0 # ONNX export
onnxsim>=0.4.1 # ONNX simplifier
# nvidia-pyindex # TensorRT export
# nvidia-tensorrt # TensorRT export
# scikit-learn==0.19.2 # CoreML quantization
# tensorflow>=2.4.1 # TF exports (-cpu, -aarch64, -macos)
# tflite-support
# tensorflowjs>=3.9.0 # TF.js export
# openvino-dev>=2023.0 # OpenVINO export
# Extras --------------------------------------
psutil # system utilization
py-cpuinfo # display CPU info
# thop>=0.1.1 # FLOPs computation
# ipython # interactive notebook
# albumentations>=1.0.3 # training augmentations
# pycocotools>=2.0.6 # COCO mAP
# roboflow
继续在终端输入命令进行依赖库安装
cd ultralytics_yolov8
pip install -r requirements.txt -i https://pypi.tuna.tsinghua.edu.cn/simple
pip install -e .
2 安装RKNN Toolkit2工具包
2.1下载安装RKNN相关库文件
创建一个名为RKNN-Toolkit2、Python版本为3.10的新环境:
conda create -n RKNN-Toolkit2 python=3.10出现提示时,输入y确认创建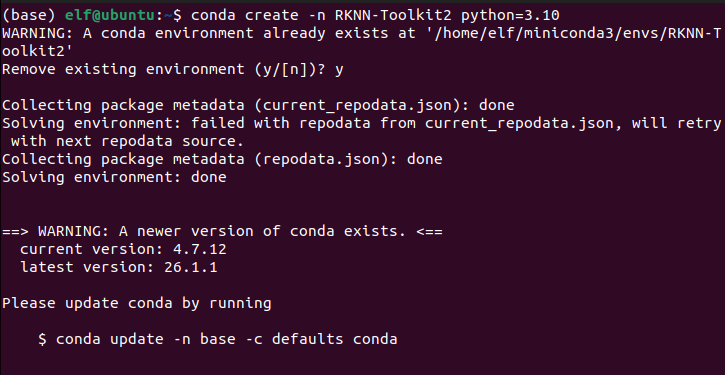
创建完成后会有如图样式的结构
然后激活这个新创建的环境 conda activate RKNN-Toolkit2 ,激活成功后,命令行提示符将从base)变为(RKNN-Toolkit2) 。此后所有模型转换操作都必须在此激活的环境下进行。
![]()
安装 RKNN-Toolkit2 工具包:
pip install rknn-toolkit2==2.3.2 -i https://pypi.tuna.tsinghua.edu.cn/simple此命令指定安装版本2.3.2,并使用清华大学镜像源加速下载。

安装完成后,运行一个简单的Python命令来验证RKNN-Toolkit2库能否被正确导入。
python -c "from rknn.api import RKNN; print('RKNN-Toolkit2 安装成功!')"若安装成功则会有如图所示的安装成功
2.2 获取转换资源与放置模型
chmod 777 ~/Downloads/rknn_model_zoo-2.1.0/examples/yolov8/model从提供的Release v2.3.2: Update rknn_model_zoo to V2.3.2 · airockchip/rknn_model_zoo · GitHub下,获取 rknn_model_zoo-2.1.0.zip根据实际获得的版本文件,然后将其解压到工作目录中
将模型训练然后导出,拥有的一个.oonx格式的模型文件,将模型文件复制到资源包的指定目录
![]()
赋予模型目录写入权限(确保转换脚本能写入生成的.rknn文件):
chmod 777 ~/Downloads/rknn_model_zoo-2.1.0/examples/yolov8/model安装额外的Python依赖(转换脚本需要):
pip install onnx==1.14.1 -i https://pypi.tuna.tsinghua.edu.cn/simple2.3 执行模型转换
进入转换脚本所在目录
cd ~/Downloads/rknn_model_zoo-2.1.0/examples/yolov8/python注意,在进入目录后一定要确保所在环境是RKNN-Toolkit2,然后再执行模型转换命令
python convert.py ../model/my_yolov8n.onnx rk3588 i8 ../model/best.rknn
开始转换后会有如图的步骤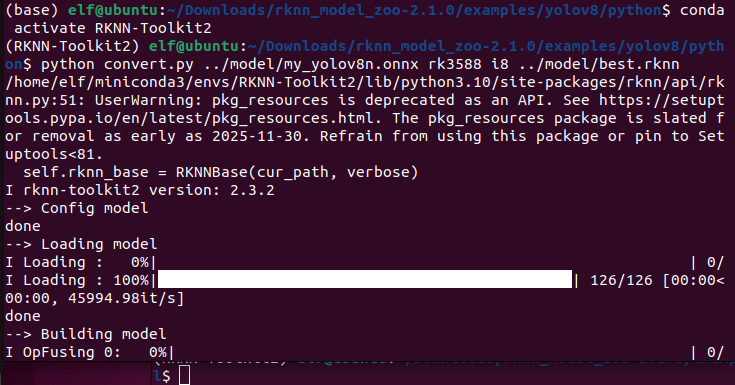
转化成功后会有下图所示的成功标志
2.4 交叉编译工具安装
tar xvf gcc-arm-10.2-2020.11-x86_64-aarch64-none-linux-gnu.tar.xz2.5 图像目标检测
export GCC_COMPILER=/home/elf/work/gcc-arm-10.2-2020.11-x86_64-aarch64-none-linux-gnu/bin/a
arch64-none-linux-gnu./build-linux.sh -trk3588 -a aarch64 -d yolov8cd rknn_yolov8_demo/
sudo chmod +x rknn_yolov8_demo
./rknn_yolov8_demo model/yolov8.rknn model/bus.jpg
AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐
 18
18 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)