智能驾驶中的自适应巡航控制模型探索:Simulink与PreScan联合仿真
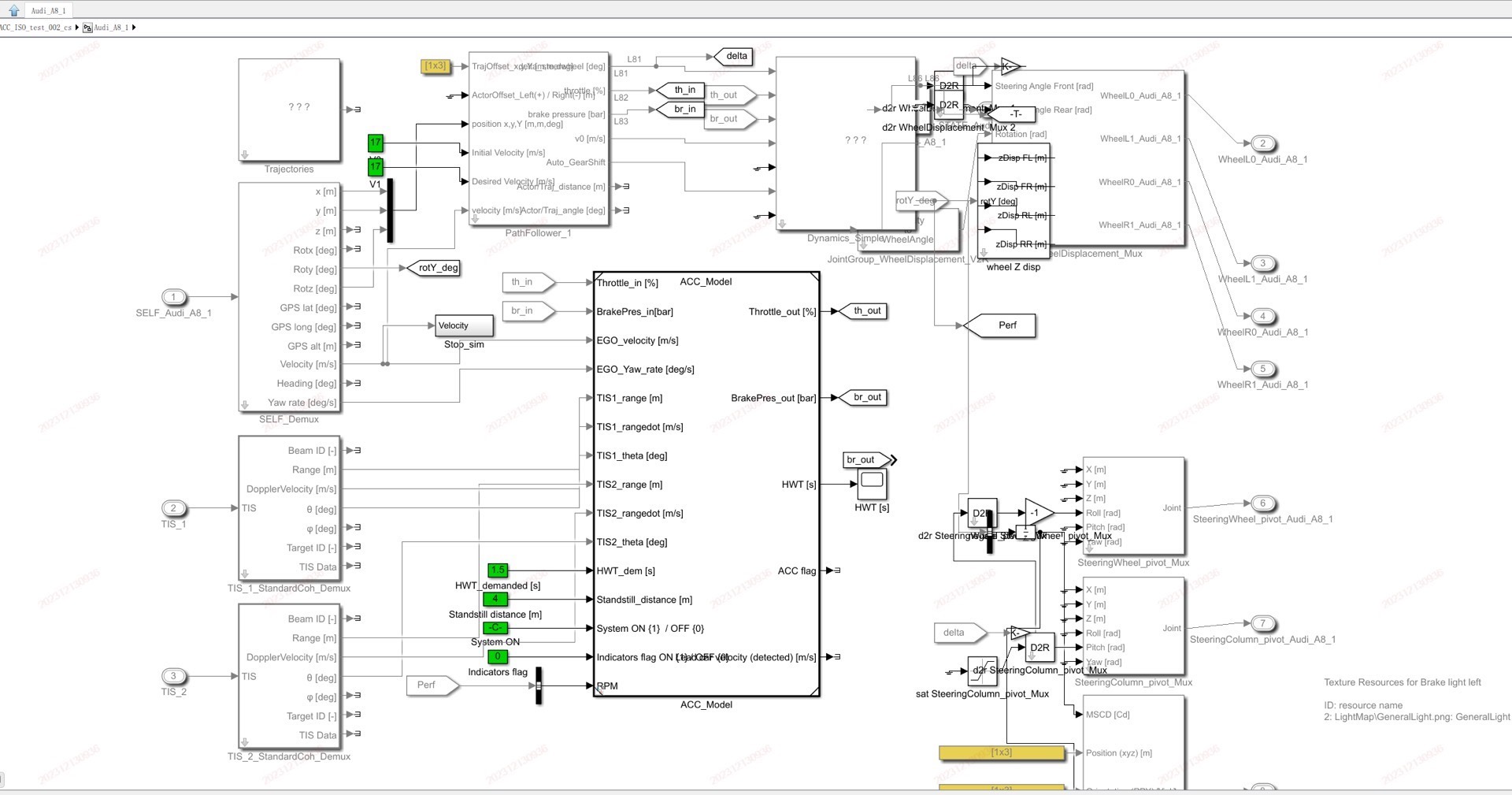
ACC自适应巡航控制模型/直/弯路控制/制动油门/安全距离计算(Simulink与PreScan联合仿真),ADS仿真模型(模型详细清晰,能够快速提升个人水平),奥迪A8 智能驾驶L2级别模型,做智能驾驶的可以参考学习!! 包括直路控制策略 弯路控制策略 制动油门控制策略 安全距离计算
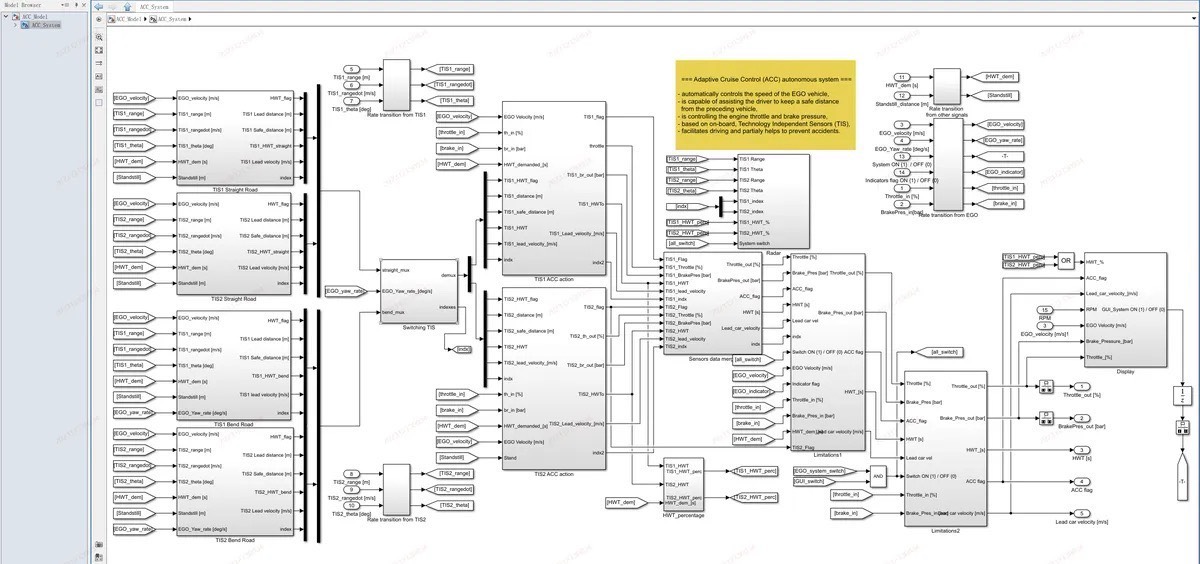
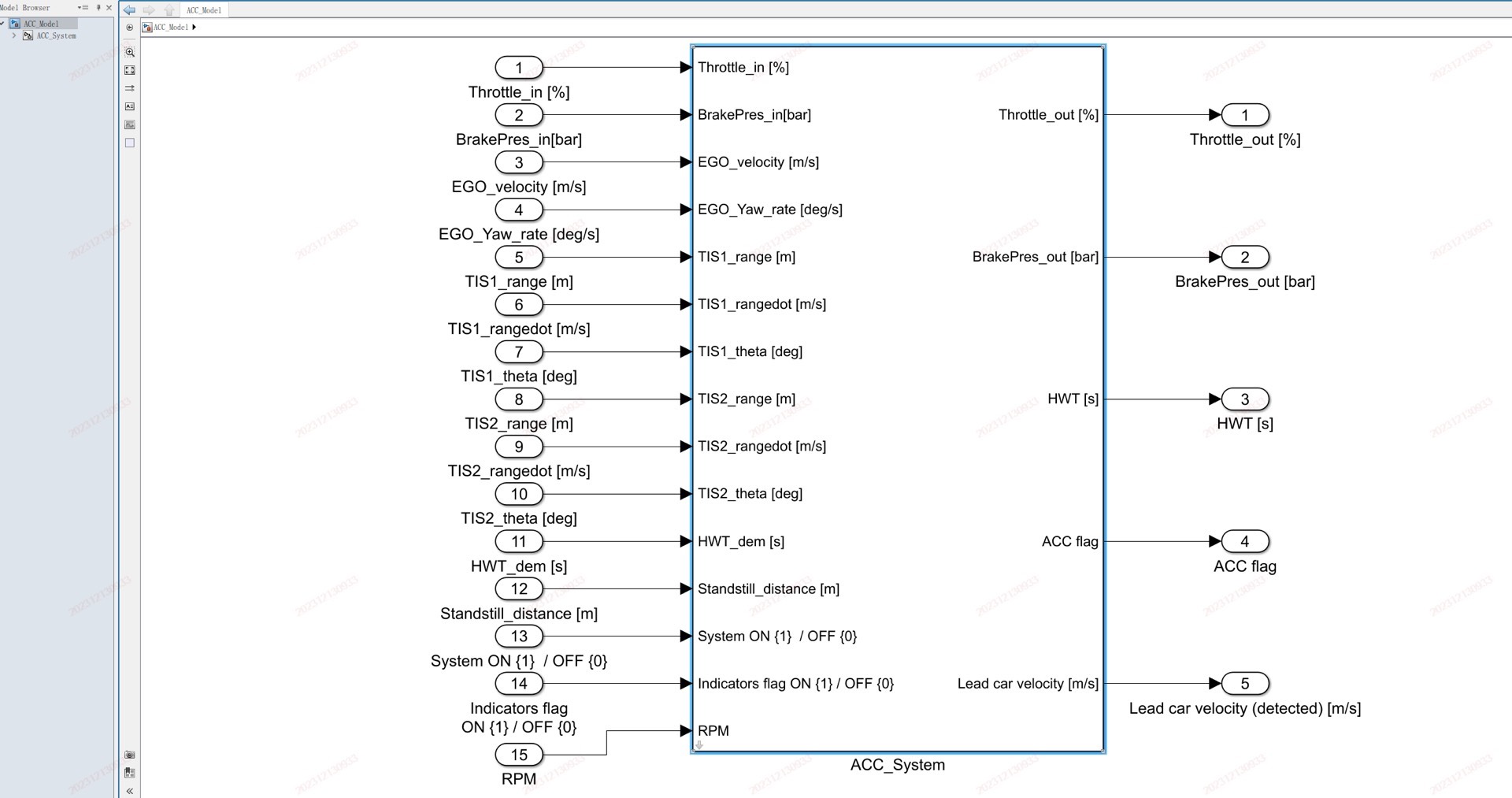
在智能驾驶领域,ACC自适应巡航控制模型是一个核心组件,它涉及到直路、弯路的精准控制,制动油门的合理调节以及安全距离的科学计算。今天就和大家详细聊聊这其中的门道,并且借助Simulink与PreScan联合仿真来一探究竟,还会介绍奥迪A8智能驾驶L2级别模型供大家参考学习。
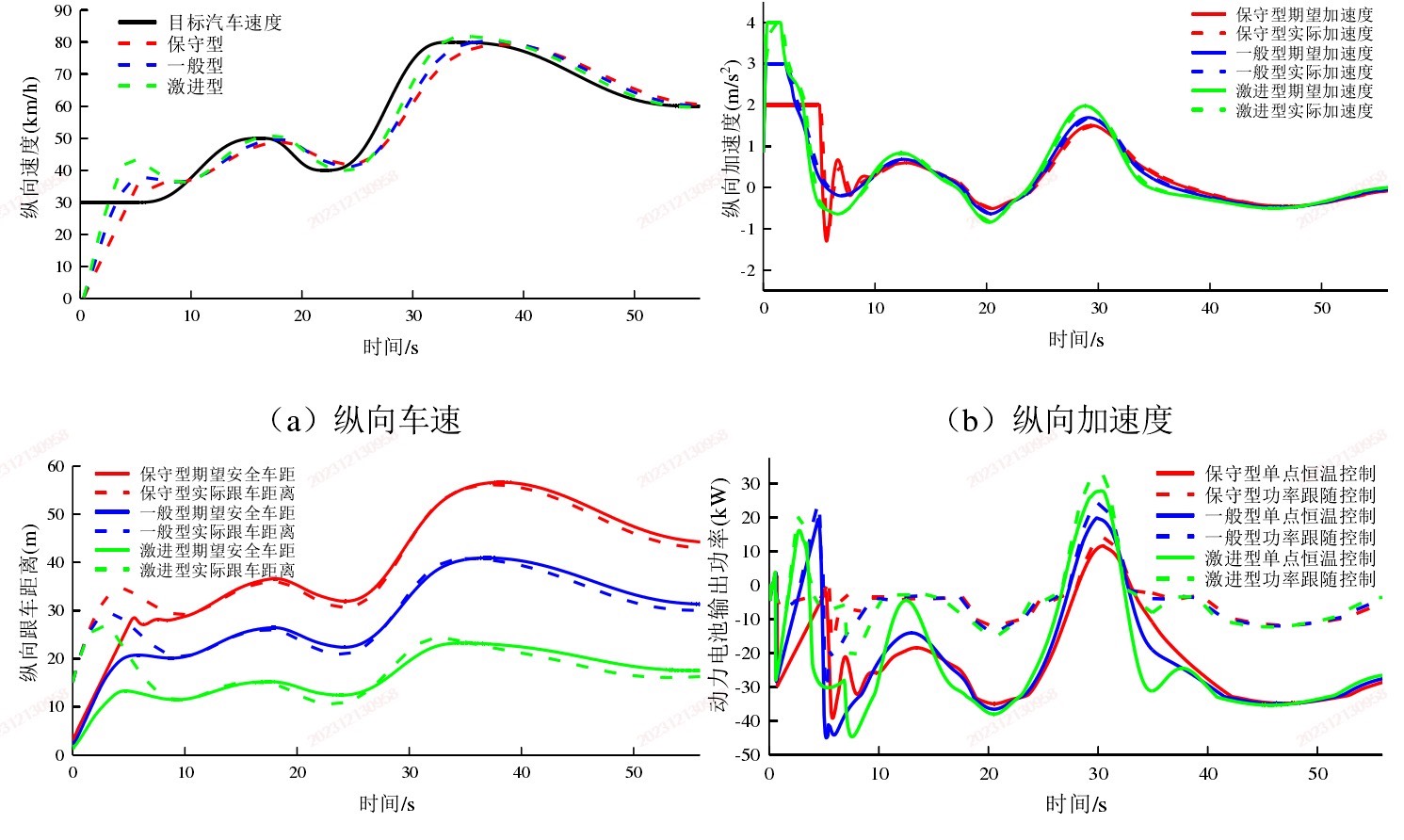
直路控制策略
直路行驶看似简单,但要实现精准控制并不容易。在ACC模型里,直路控制主要目标是保持设定的巡航速度。
代码示例(以简单的PID控制为例,伪代码)
% 初始化参数
Kp = 0.5;
Ki = 0.1;
Kd = 0.05;
set_speed = 100; % 设定速度,单位km/h
error_sum = 0;
prev_error = 0;
while true
current_speed = get_current_speed(); % 获取当前速度函数
error = set_speed - current_speed;
error_sum = error_sum + error;
d_error = error - prev_error;
control_signal = Kp * error + Ki * error_sum + Kd * d_error;
% 根据control_signal调节油门或制动
adjust_throttle_brake(control_signal);
prev_error = error;
end代码分析
这段代码利用PID控制器来调节车辆速度。Kp、Ki、Kd分别是比例、积分、微分系数。通过计算设定速度和当前速度的误差,利用PID算法得到一个控制信号,这个信号用于调节油门或制动,使得车辆速度尽可能接近设定速度。比如,如果当前速度低于设定速度,控制信号会增加油门开度;反之,如果高于设定速度,控制信号可能会触发制动。
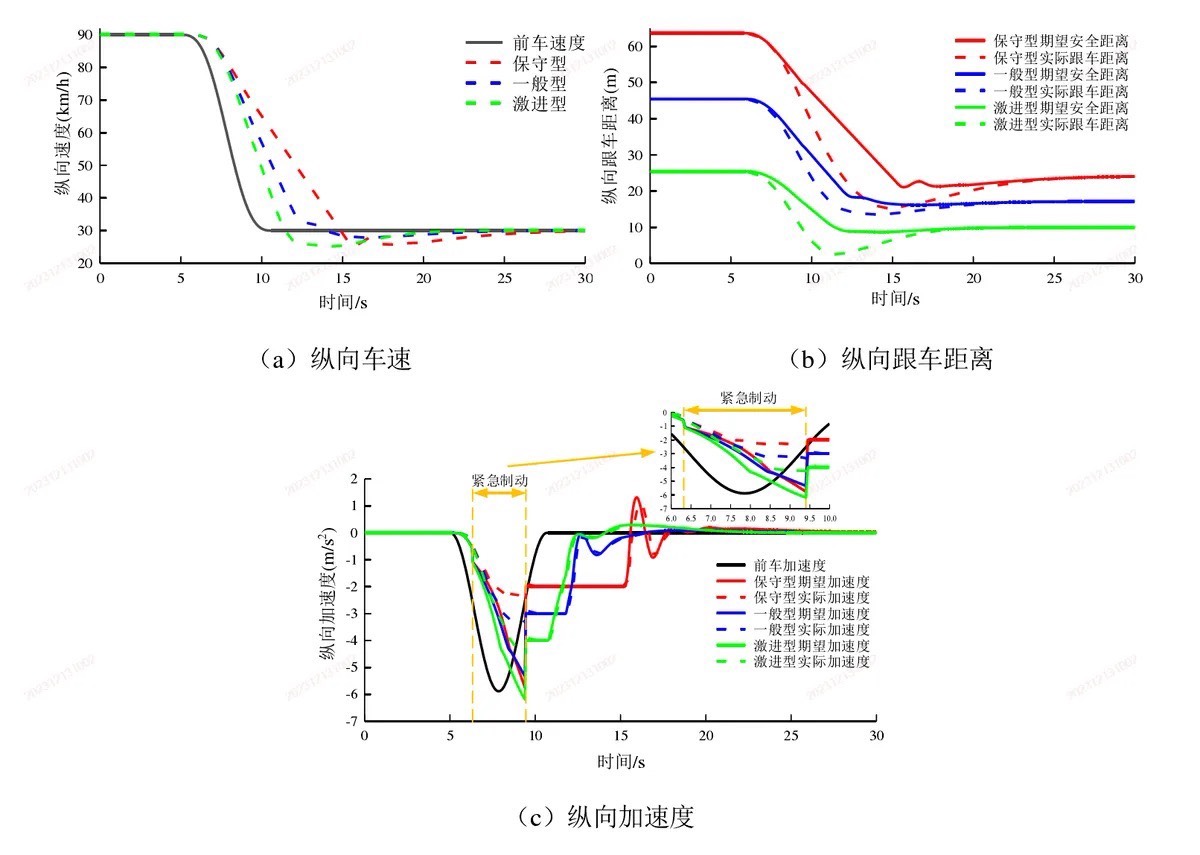
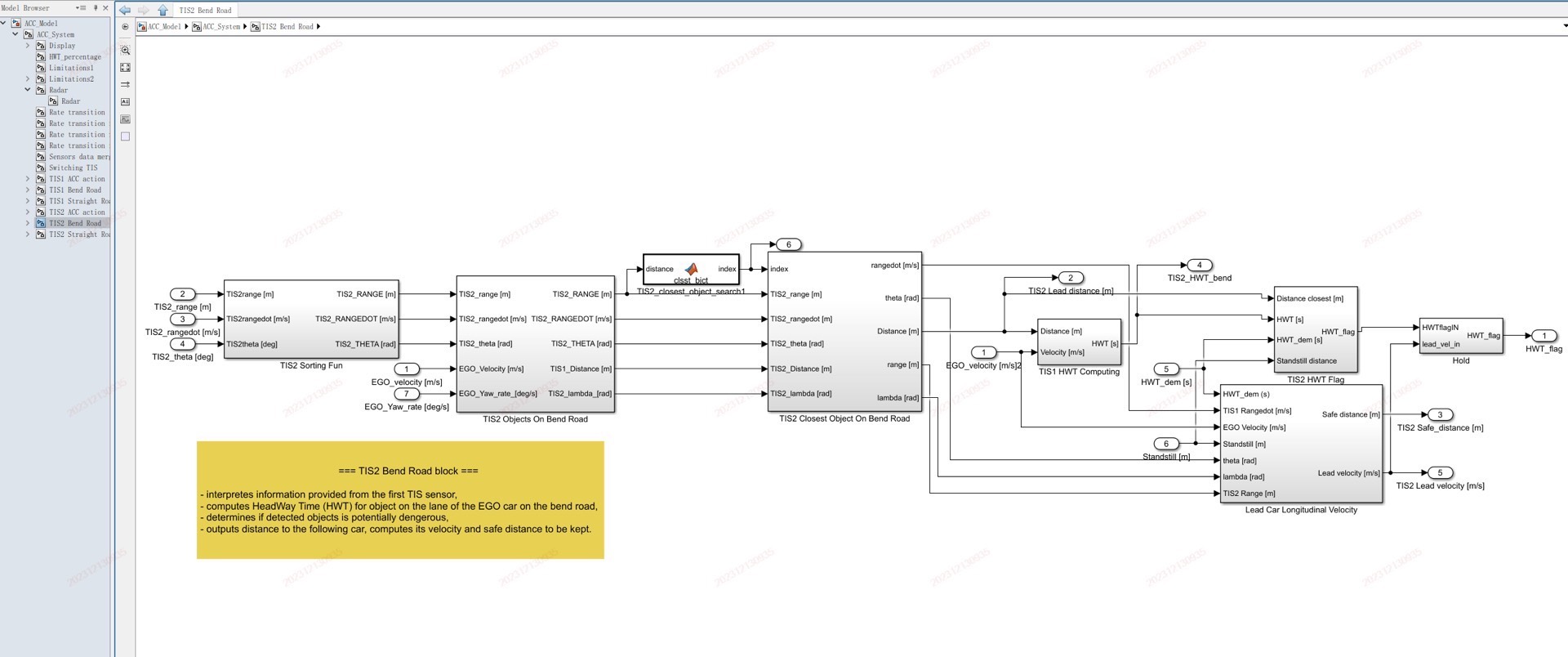
弯路控制策略
车辆在弯路行驶时,不仅要保持适当速度,还要考虑向心力等因素以确保行驶安全。
代码示例(简单的基于曲率的弯路速度调整,伪代码)
while approaching_curve
curve_curvature = get_curve_curvature(); % 获取弯路曲率函数
safe_speed = calculate_safe_speed(curve_curvature); % 根据曲率计算安全速度函数
current_speed = get_current_speed();
if current_speed > safe_speed
deceleration = calculate_deceleration(current_speed, safe_speed); % 计算减速度函数
apply_brake(deceleration); % 施加制动函数
end
end代码分析
这段代码逻辑很清晰,当检测到车辆接近弯路时,先获取弯路的曲率。根据曲率计算出安全行驶速度,接着对比当前速度和安全速度。如果当前速度过快,就计算出合适的减速度并施加制动,让车辆以安全速度通过弯路。
制动油门控制策略
制动和油门控制紧密关联着车辆的加减速,是ACC模型的关键执行部分。
代码示例(结合速度误差的制动油门控制,伪代码)
error = set_speed - current_speed;
if error > 0
% 速度低于设定值,增加油门
throttle_increase = calculate_throttle_increase(error); % 根据误差计算油门增加量函数
apply_throttle(throttle_increase);
elseif error < 0
% 速度高于设定值,制动
braking_force = calculate_braking_force(-error); % 根据误差计算制动力函数
apply_brake(braking_force);
end代码分析
这里通过速度误差来决定是控制油门还是制动。当速度低于设定值,计算出需要增加的油门量并施加;当速度高于设定值,则计算合适的制动力进行制动。
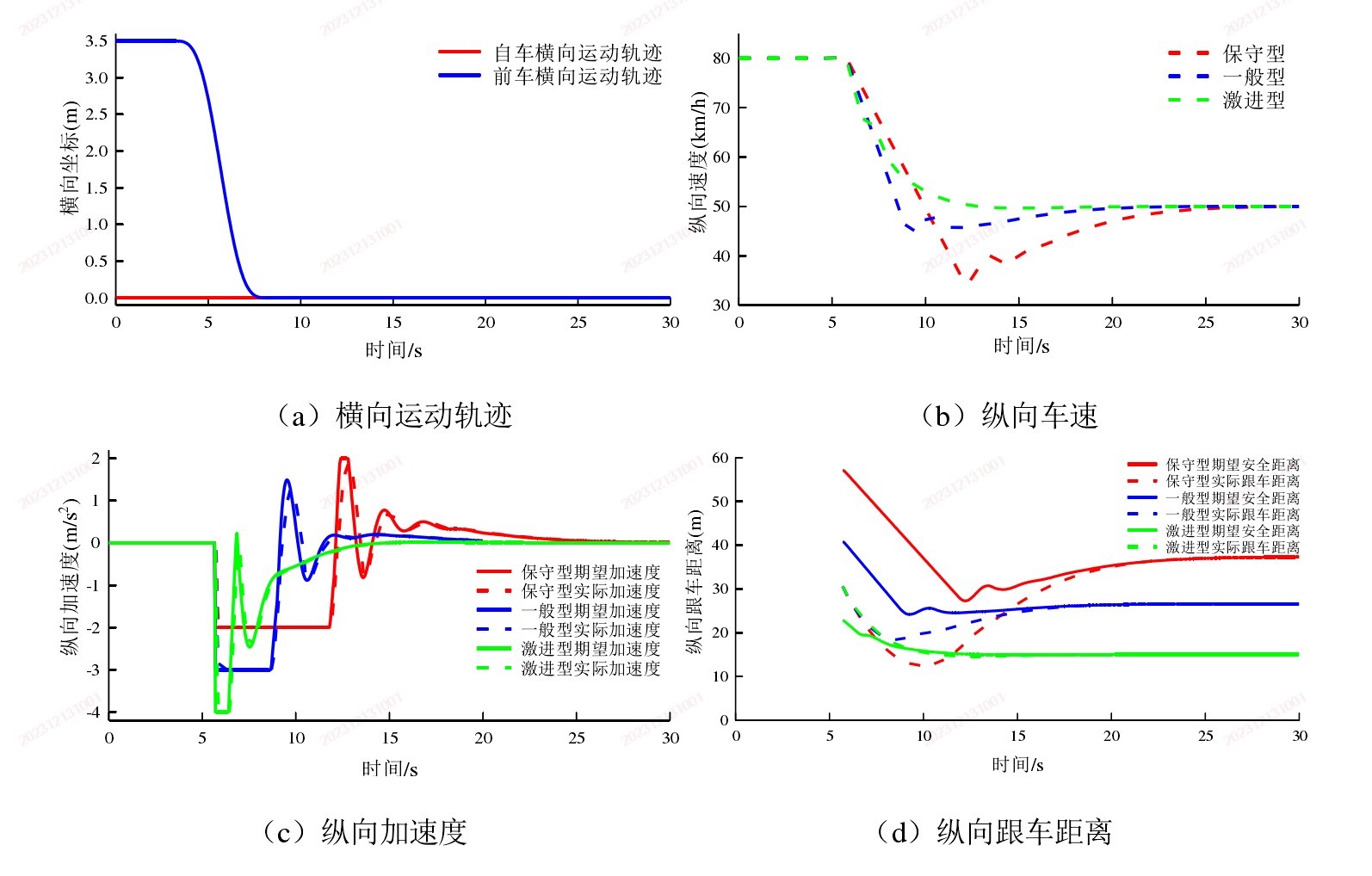
安全距离计算
安全距离是保证车辆行驶安全的重要参数,它与车速、车辆制动性能等因素相关。
代码示例(简单的安全距离计算,伪代码)
current_speed = get_current_speed();
reaction_time = 1; % 假设反应时间为1秒
braking_distance = calculate_braking_distance(current_speed); % 根据速度计算制动距离函数
safety_distance = current_speed * reaction_time + braking_distance;代码分析
这段代码计算安全距离时考虑了反应距离(速度乘以反应时间)和制动距离。这样计算出的安全距离能让车辆在紧急情况下有足够空间停车,避免碰撞。
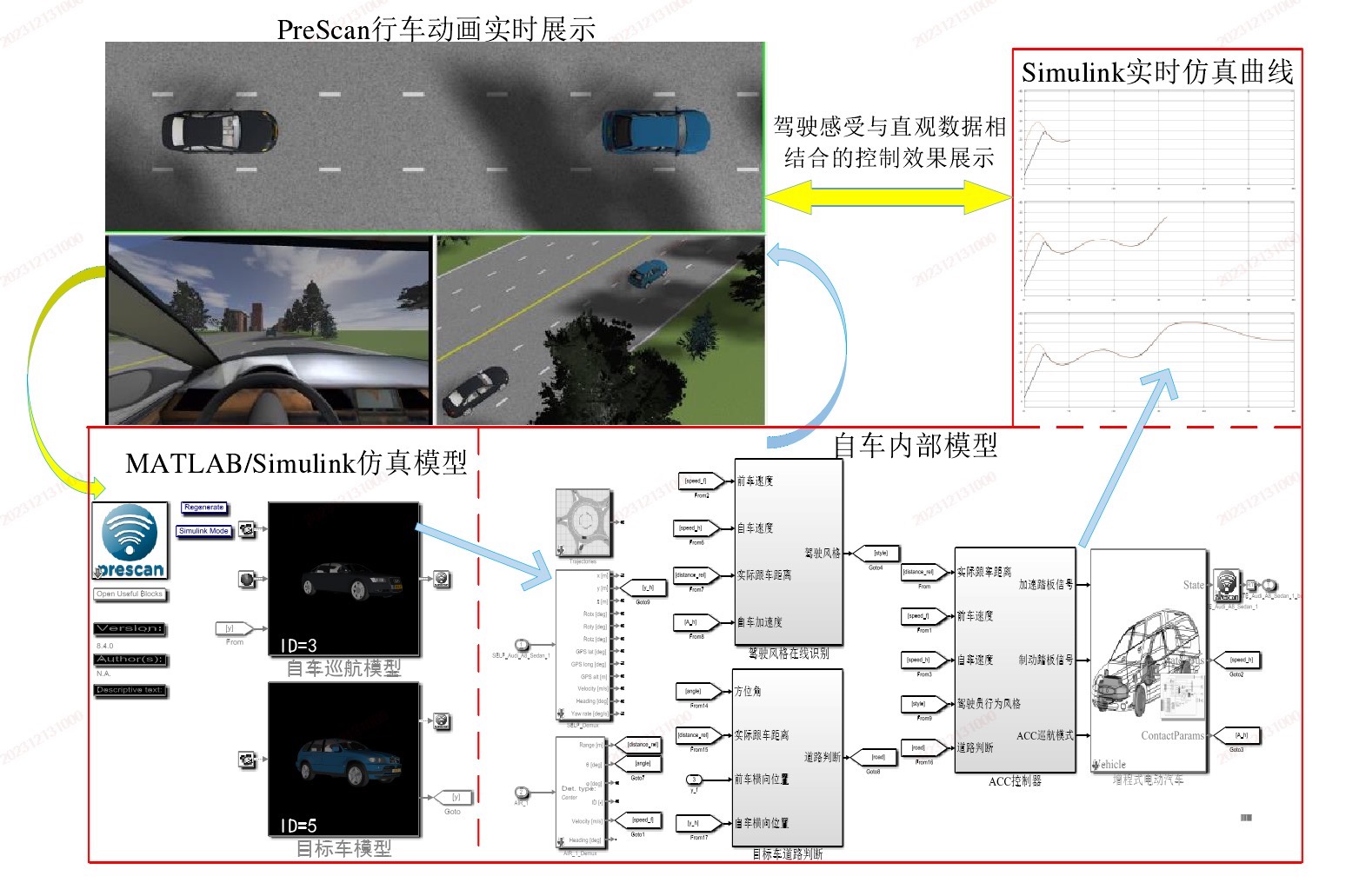
ACC自适应巡航控制模型/直/弯路控制/制动油门/安全距离计算(Simulink与PreScan联合仿真),ADS仿真模型(模型详细清晰,能够快速提升个人水平),奥迪A8 智能驾驶L2级别模型,做智能驾驶的可以参考学习!! 包括直路控制策略 弯路控制策略 制动油门控制策略 安全距离计算
奥迪A8的智能驾驶L2级别模型在上述各方面控制策略上有着较为成熟的实现。它的ADS仿真模型详细清晰,对于想提升智能驾驶水平的朋友来说是很好的学习范例。通过Simulink与PreScan联合仿真,我们能更直观地观察和验证这些控制策略的实际效果,从而不断优化智能驾驶系统。希望本文能为各位智能驾驶领域的小伙伴带来一些启发和帮助!

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐

 0
0 0
0- 0



 已为社区贡献17条内容
已为社区贡献17条内容

所有评论(0)