混动汽车能量管理:动态规划算法的奇妙之旅
动态规划算法DP在混合动力汽车能量管理策略开发上的运用。 可以结合车速预测模型(BP或者RBF神经网络,预测模型资料也有发在其他链接)根据预测的信息对车辆进行控制可以对混动汽车的能量管理具有一定的参考意义。 DP动态规划程序主要适用于MPC(模型预测控制)或其基于MPC的能量管理策略的预测时预内的混动优化算法! ——和模型预测MPC结合运用,加上预测模型可实现在线预测近似实时最优!!(本人编写DP就是与MPC相结合) 逆向迭代,正向求解(混动整车能量管理做到全局最优) ——(动态规划网上找不到资料,自己千辛万苦编写1000多行的代码,全是自己开发的,全网独一份) ——代码全是硬货,理解了自己就可以运用到自己优化的整车上,SCI/EI论文轻松拿下,本人发表2篇SCI一区全靠它,只要搞懂随随便便出论文! *动态规划算法(DP)?神经网络预测模型(GA-BP/RBF)=模型预测控制(MPC)——识货的大神欢迎咨询交流!*
在混动汽车的能量管理策略开发领域,动态规划算法(DP)正逐渐崭露头角,成为众多研究者和工程师关注的焦点。今天咱就来唠唠DP在这一领域的精彩应用。
混动汽车能量管理的挑战
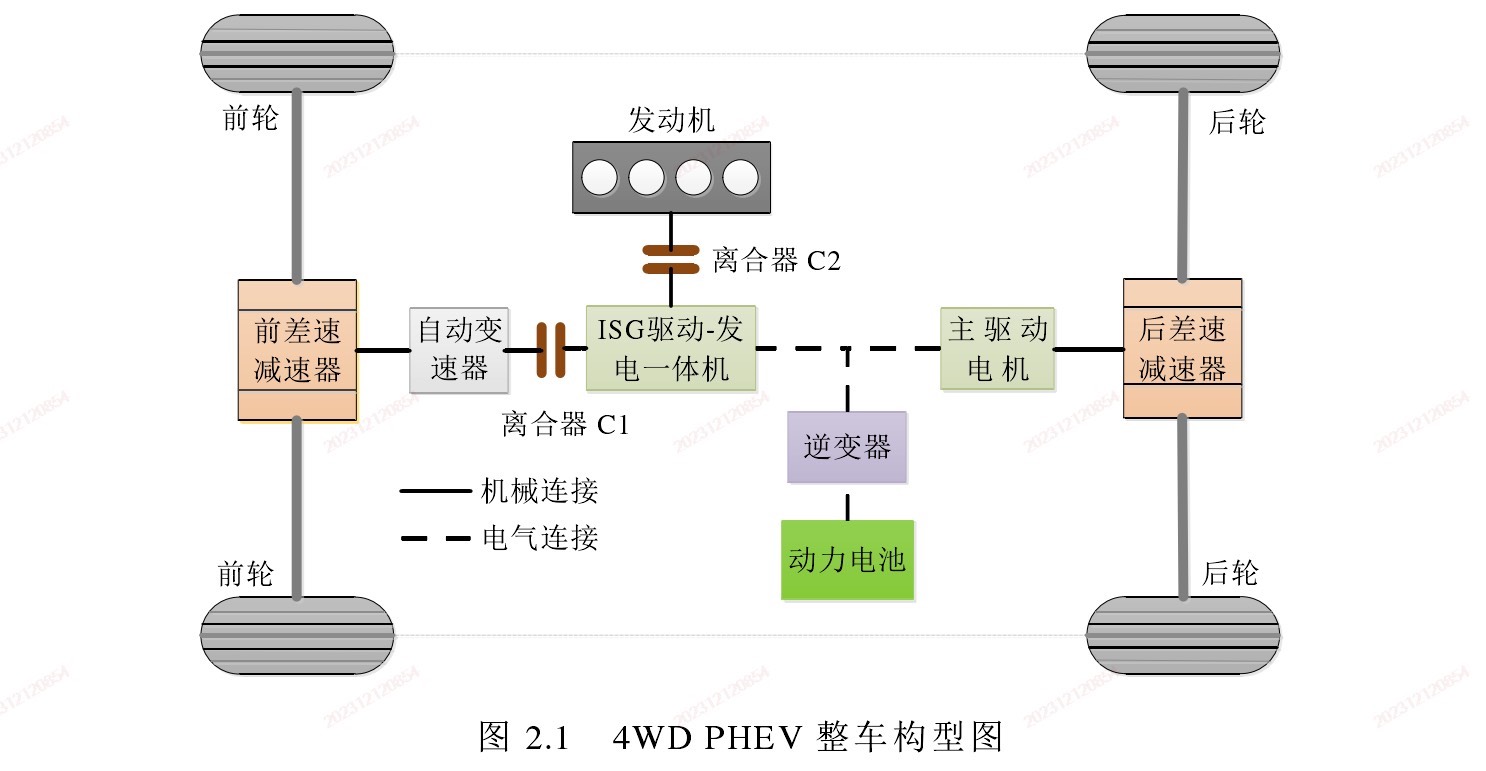
混动汽车结合了传统燃油发动机和电动机,能量来源的多样性既带来了优势,也让能量管理变得棘手。如何在不同工况下合理分配发动机和电动机的功率,以达到最优的燃油经济性、排放性能等目标,就是能量管理策略需要解决的关键问题。
动态规划算法(DP)的秘密武器
DP是一种通过把原问题分解为相对简单的子问题,并保存子问题的解来避免重复计算,从而求解复杂问题的方法。在混动汽车能量管理中,它能通过逆向迭代、正向求解,实现混动整车能量管理的全局最优。
想象一下,汽车行驶过程就像一场漫长的旅程,每一个时间点就是旅程中的一站。DP算法就像是一个聪明的旅行者,它先从旅程的终点往回规划,分析在每个站点怎样选择行动(比如发动机和电动机的功率分配),才能让整个旅程最“划算”(达到最优的能量管理目标)。然后再从起点出发,按照之前规划好的路线前进。
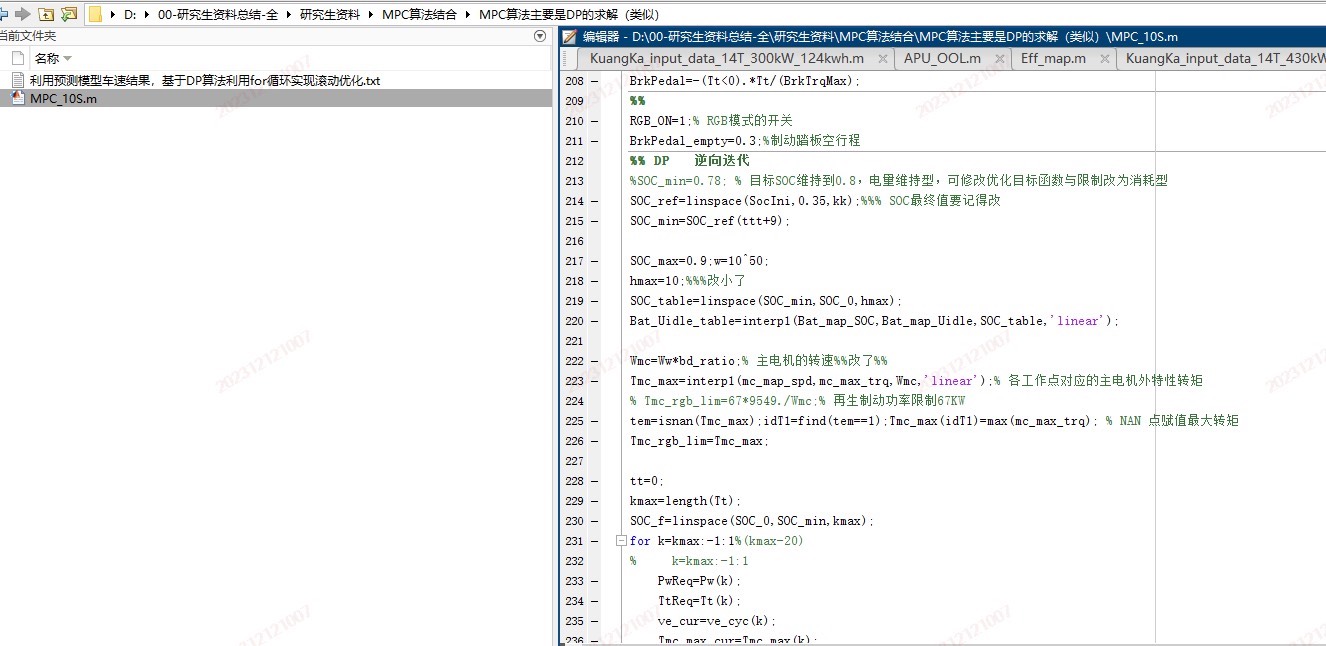
下面简单展示一段DP算法核心逻辑的伪代码(实际代码我可是写了1000多行,全网独一份哦):
# 假设state表示车辆的状态(如车速、电池电量等)
# action表示发动机和电动机的功率分配动作
# cost表示执行某个动作后的代价(如燃油消耗、电池损耗等)
# future_cost表示从当前状态往后的最小代价
def dp_algorithm(states, actions):
num_states = len(states)
num_actions = len(actions)
future_cost = [[0 for _ in range(num_actions)] for _ in range(num_states)]
# 逆向迭代
for state in reversed(range(num_states)):
for action in range(num_actions):
# 计算当前动作的代价
current_cost = cost(state, action)
# 计算下一个状态
next_state = next_state_function(state, action)
# 查找下一个状态的最小代价
next_cost = min([future_cost[next_state][a] for a in range(num_actions)])
future_cost[state][action] = current_cost + next_cost
# 正向求解
optimal_actions = []
current_state = 0
for _ in range(num_states - 1):
best_action = min(range(num_actions), key=lambda a: future_cost[current_state][a])
optimal_actions.append(best_action)
current_state = next_state_function(current_state, best_action)
return optimal_actions在这段代码中,我们首先通过逆向迭代计算从每个状态出发采取不同动作后的最小代价。这里面cost(state, action)函数计算执行某个动作后的代价,nextstatefunction(state, action)函数计算采取某个动作后车辆的下一个状态。然后,通过正向求解,从初始状态开始,依据之前计算好的最小代价选择最优动作,从而得到整个行驶过程的最优动作序列。
与车速预测模型的梦幻联动
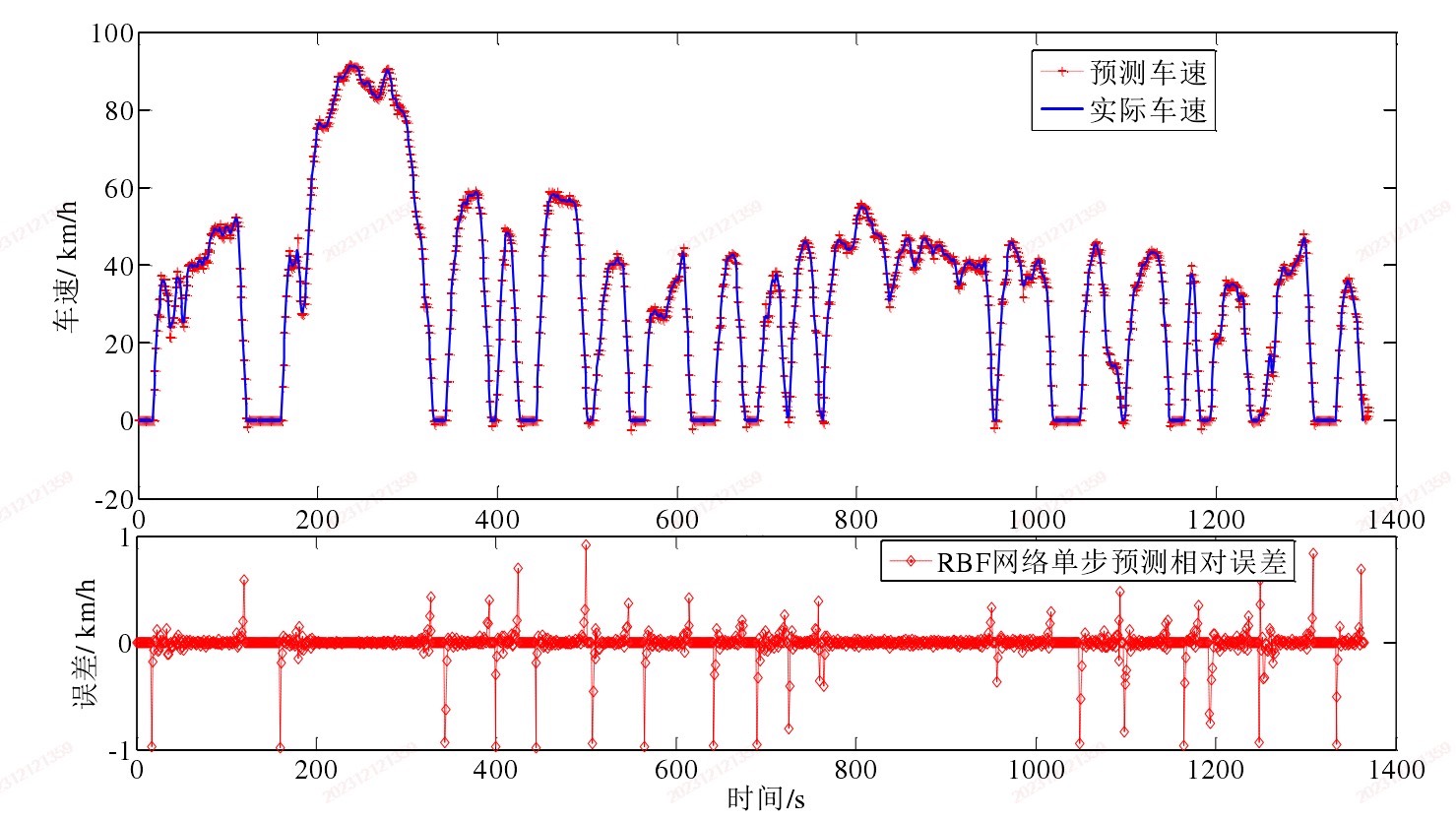
为了让DP算法更“聪明”,结合车速预测模型(如BP或者RBF神经网络)是个绝佳的思路。车速预测模型能够提前预测车辆未来的行驶工况,基于这些预测信息,DP算法就能更好地规划能量管理策略。
动态规划算法DP在混合动力汽车能量管理策略开发上的运用。 可以结合车速预测模型(BP或者RBF神经网络,预测模型资料也有发在其他链接)根据预测的信息对车辆进行控制可以对混动汽车的能量管理具有一定的参考意义。 DP动态规划程序主要适用于MPC(模型预测控制)或其基于MPC的能量管理策略的预测时预内的混动优化算法! ——和模型预测MPC结合运用,加上预测模型可实现在线预测近似实时最优!!(本人编写DP就是与MPC相结合) 逆向迭代,正向求解(混动整车能量管理做到全局最优) ——(动态规划网上找不到资料,自己千辛万苦编写1000多行的代码,全是自己开发的,全网独一份) ——代码全是硬货,理解了自己就可以运用到自己优化的整车上,SCI/EI论文轻松拿下,本人发表2篇SCI一区全靠它,只要搞懂随随便便出论文! *动态规划算法(DP)?神经网络预测模型(GA-BP/RBF)=模型预测控制(MPC)——识货的大神欢迎咨询交流!*
比如说,如果预测到车辆即将进入一段高速行驶工况,DP算法就可以提前规划,让发动机在更高效的工作区间运行,同时合理利用电动机辅助,以达到更好的燃油经济性。
与模型预测控制(MPC)的强强联合
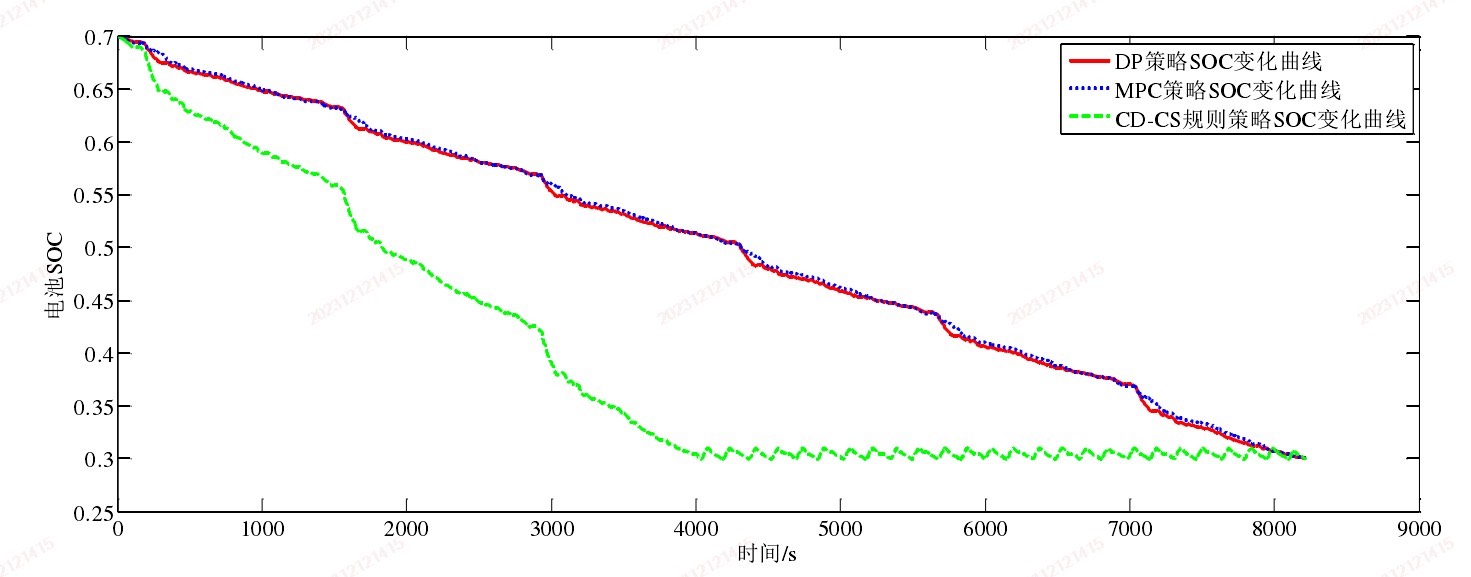
DP动态规划程序在混动优化算法中,特别适用于MPC或基于MPC的能量管理策略预测时域内的优化。MPC是一种基于模型的控制策略,它通过预测系统未来的输出,并根据预测结果优化当前的控制输入。
将DP与MPC相结合,再加上车速预测模型,就如同给混动汽车装上了一个智能大脑,能够实现在线预测近似实时最优的能量管理策略。这就意味着,车辆能够根据实时的行驶工况和预测信息,动态地调整发动机和电动机的功率分配,始终保持在最优的能量管理状态。
我自己在开发过程中,将DP与MPC深度融合,经过无数次的调试和优化,才完成了这独一无二的代码。理解并掌握这套代码后,你就可以将其运用到自己优化的整车上,无论是发SCI/EI论文,还是实际提升混动汽车性能,都不在话下。我自己就靠着它发表了2篇SCI一区论文呢!
如果你也是这方面的大神,对动态规划算法(DP)、神经网络预测模型(GA - BP/RBF)以及模型预测控制(MPC)感兴趣,欢迎一起交流探讨,说不定能碰撞出更多智慧的火花!

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐



 0
0 0
0- 0



 已为社区贡献21条内容
已为社区贡献21条内容

所有评论(0)