计算机毕业设计Python深度学习物流网络优化与货运路线规划系统 大数据毕业设计(源码+文档+PPT+ 讲解)
温馨提示:文末有 CSDN 平台官方提供的学长联系方式的名片!
温馨提示:文末有 CSDN 平台官方提供的学长联系方式的名片!
温馨提示:文末有 CSDN 平台官方提供的学长联系方式的名片!
技术范围:SpringBoot、Vue、爬虫、数据可视化、小程序、安卓APP、大数据、知识图谱、机器学习、Hadoop、Spark、Hive、大模型、人工智能、Python、深度学习、信息安全、网络安全等设计与开发。
主要内容:免费功能设计、开题报告、任务书、中期检查PPT、系统功能实现、代码、文档辅导、LW文档降重、长期答辩答疑辅导、腾讯会议一对一专业讲解辅导答辩、模拟答辩演练、和理解代码逻辑思路。
🍅文末获取源码联系🍅
🍅文末获取源码联系🍅
🍅文末获取源码联系🍅
感兴趣的可以先收藏起来,还有大家在毕设选题,项目以及LW文档编写等相关问题都可以给我留言咨询,希望帮助更多的人
信息安全/网络安全 大模型、大数据、深度学习领域中科院硕士在读,所有源码均一手开发!
感兴趣的可以先收藏起来,还有大家在毕设选题,项目以及论文编写等相关问题都可以给我留言咨询,希望帮助更多的人
介绍资料
Python深度学习物流网络优化与货运路线规划系统技术说明
一、系统背景与目标
随着电子商务和全球化贸易的快速发展,物流行业面临货物运输量激增、运输网络复杂化、客户需求多样化等挑战。传统物流网络优化与货运路线规划方法在处理大规模动态数据时存在效率瓶颈,难以满足实时性、精准性和灵活性的需求。本系统基于Python深度学习技术,旨在构建智能化的物流网络优化与货运路线规划系统,实现以下目标:
- 动态需求预测:利用时序模型预测各节点货物需求量,为路线规划提供数据支持。
- 网络拓扑优化:通过图神经网络(GNN)建模物流网络结构,识别关键节点与瓶颈,优化物流网络布局。
- 智能路径规划:结合深度强化学习(DRL)与实时交通数据,动态规划最优货运路线,降低运输成本和时间。
- 多目标优化:平衡成本、时间、碳排放等多约束条件,生成满足实际需求的解决方案。
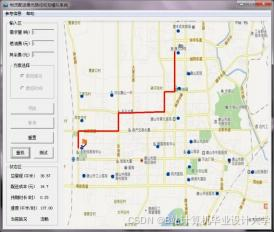
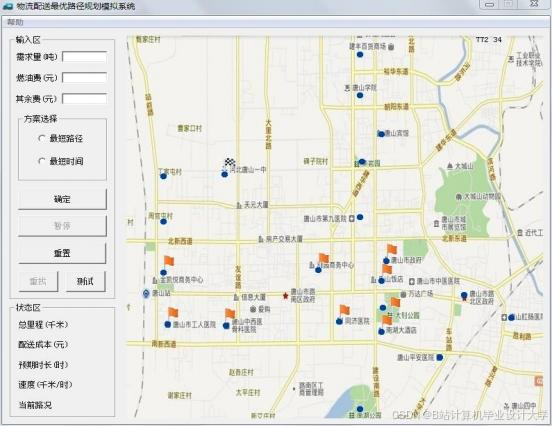
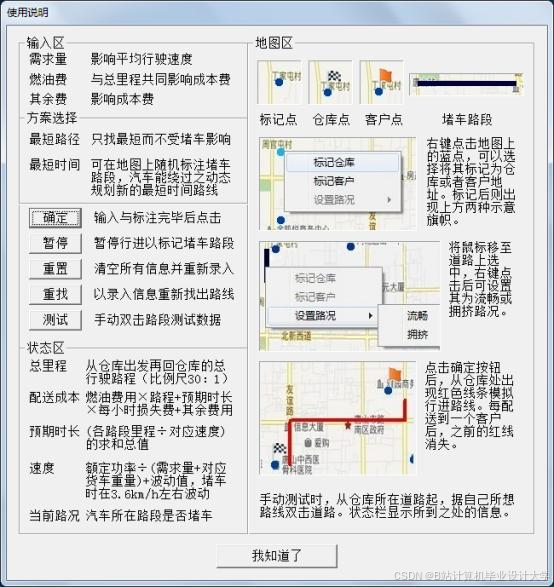
- 可视化与交互:开发用户友好的可视化界面,支持参数配置、结果展示与实时监控。
二、系统架构设计
系统采用分层架构设计,涵盖数据层、模型层、决策层与应用层,技术栈如下:
1. 数据层
- 数据采集:整合多源异构数据,包括历史订单数据(时间、地点、货物量)、实时交通数据(高德/百度地图API获取的拥堵指数、道路限速)、车辆状态数据(GPS轨迹、载重、电池电量)、天气数据(OpenWeatherMap API)等。
- 数据存储:
- 结构化数据:使用MySQL存储订单、车辆信息等静态数据。
- 非结构化数据:采用MongoDB存储GPS轨迹、交通事件等动态数据。
- 图数据:利用Neo4j存储物流网络拓扑关系(节点为仓库/客户,边为运输路径及权重)。
- 时空数据:通过TimescaleDB存储车辆轨迹数据,支持高效时间范围查询。
- 数据预处理:使用Pandas和NumPy进行数据清洗(缺失值填充、异常值剔除)、归一化与特征工程(时间特征编码、空间特征嵌入)。例如,将客户地址通过GeoHash编码为字符串,降低维度;提取节点特征(地理位置、需求频率)与边特征(距离、通行时间、成本)。
2. 模型层
(1)时序预测模块
- 模型选择:采用LSTM或Transformer混合模型预测节点货物需求量。LSTM擅长捕捉长期依赖关系,Transformer通过自注意力机制提取全局特征,混合模型可提升预测精度。
- 训练数据:历史订单数据,结合外部特征(如节假日、天气)进行多变量预测。
- 输出结果:各节点未来一段时间内的货物需求量,用于网络优化与路径规划。
(2)图神经网络(GNN)模块
- 模型选择:使用图注意力网络(GAT)建模物流网络结构。GAT通过注意力机制动态聚合邻居节点信息,捕捉节点间复杂关系。
- 输入输出:
- 输入:物流网络图结构(邻接矩阵+节点特征矩阵),节点特征包括需求量、服务时间窗、优先级等;边特征包括历史行驶时间、路况波动率、天气影响系数等。
- 输出:节点嵌入向量,用于后续网络优化与路径规划。
- 训练目标:最小化全局物流总成本(运输成本+仓储成本),通过历史数据(如历史订单、交通状态)进行监督学习。
(3)深度强化学习(DRL)模块
-
模型选择:采用近端策略优化(PPO)算法实现动态路径规划。PPO因其稳定性被广泛用于物流RL模型,通过限制策略更新幅度提升收敛性。
-
状态空间:当前车辆位置、剩余载重、已行驶时间、待配送订单列表(经纬度+重量+时间窗)等。
-
动作空间:离散动作(选择下一个配送点)或连续动作(行驶速度调整)。
-
奖励函数:设计为多目标加权和,例如:
R=α⋅(1−迟到率)+β⋅(1−空载率)+γ⋅(1−碳排放)−δ⋅总里程
其中,α,β,γ,δ为权重参数,通过贝叶斯优化确定。
- 训练过程:在模拟环境中采集轨迹数据,计算优势函数并更新策略参数,直至收敛。
3. 决策层
- 集成GNN与DRL模型:实现“全局网络优化+局部路径规划”的协同决策。
- 全局优化:基于GNN输出的节点嵌入向量,优化物流网络布局(如调整仓库位置、划分配送范围)。
- 局部路径规划:结合DRL模型与实时交通数据,动态调整车辆路径,响应突发需求(如紧急订单、交通管制)。
- 多目标优化:采用加权求和法或帕累托前沿逼近法处理多约束条件。例如,在奖励函数中引入碳税系数,平衡成本与碳排放;或使用NSGA-II算法生成帕累托最优解集,供决策者选择。
4. 应用层
- 后端服务:基于Flask框架开发RESTful API接口,支持路径查询、状态监控与模型推理服务。集成OR-Tools库处理硬性约束(如车辆载重、时间窗),提升求解效率。
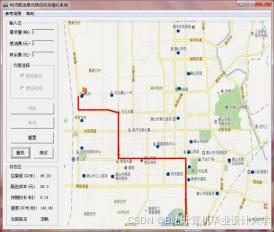
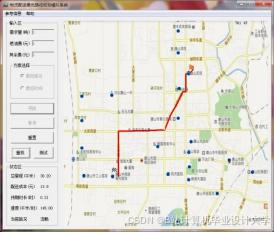
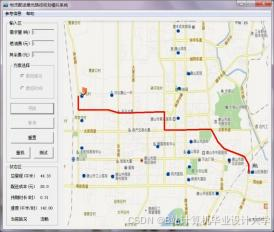
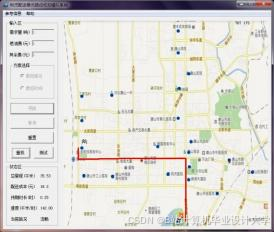
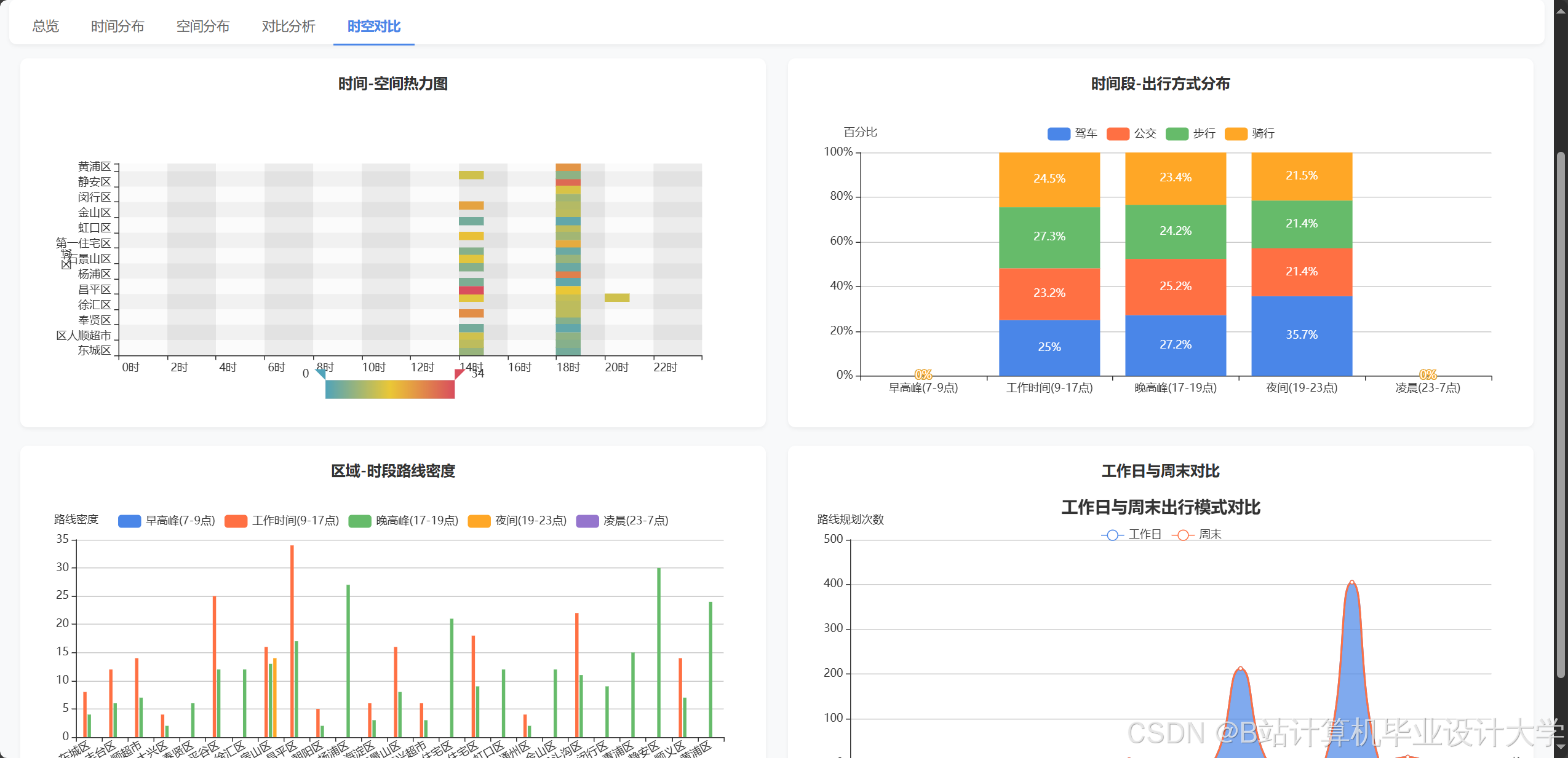
- 前端界面:采用Vue.js + ECharts实现可视化交互,展示物流网络拓扑、路径规划结果、车辆实时位置及统计图表(如成本分解图、时效对比图)。地理可视化通过Kepler.gl或Folium集成地图服务(高德/Google Maps),支持3D物流网络看板与路线对比工具。
- 轻量化部署:对LSTM模型进行知识蒸馏(参数量从10M压缩至2M),使用TensorRT加速GNN模型推理(吞吐量提升5倍),支持在配送车辆部署TinyLSTM实现局部路径实时调整。
三、关键技术实现
1. 物流网络建模
- 时空图构建:将物流网络表示为动态有向图 G=(V,E,T),其中 V 为节点集合(仓库、配送中心、客户点),E 为边集合(权重为实时路况),T 为时间维度。使用NetworkX构建基础图结构,通过DGL库实现GNN模型。
- 特征工程:
- 节点特征:需求量、服务时间窗、优先级、地理位置(GeoHash编码)。
- 边特征:历史行驶时间、路况波动率(标准差)、天气影响系数(如降雨/雪对运输效率的折扣因子)。
- 代码示例:
python1import networkx as nx 2import dgl 3import numpy as np 4 5def build_logistics_graph(nodes, edges, time_window): 6 G = nx.DiGraph() 7 G.add_nodes_from(nodes) 8 for edge in edges: 9 weight = edge['distance'] * (1 + time_window['traffic_factor']) # 动态权重 10 G.add_edge(edge['source'], edge['target'], weight=weight) 11 dgl_graph = dgl.from_networkx(G, node_attrs=['demand', 'time_window']) 12 return dgl_graph 13 14def extract_features(graph): 15 node_features = [] 16 for node in graph.nodes(): 17 features = [ 18 graph.nodes[node]['demand'], 19 graph.nodes[node]['time_window_start'], 20 graph.nodes[node]['time_window_end'] 21 ] 22 node_features.append(features) 23 edge_features = [] 24 for src, dst in graph.edges(): 25 features = [ 26 graph[src][dst]['weight'], # 实时行驶时间 27 graph[src][dst]['traffic_std'] # 路况波动率 28 ] 29 edge_features.append(features) 30 return np.array(node_features), np.array(edge_features) 31
2. 深度学习模型实现
(1)GNN编码器
- 模型结构:采用两层GATConv,输入维度为节点特征维度,隐藏层维度为64,输出维度为1(预测边权重)。
- 代码示例:
python1import torch 2import torch.nn as nn 3import dgl.nn as dglnn 4 5class GATEncoder(nn.Module): 6 def __init__(self, in_dim, hidden_dim, out_dim): 7 super().__init__() 8 self.conv1 = dglnn.GATConv(in_dim, hidden_dim, num_heads=4) 9 self.conv2 = dglnn.GATConv(hidden_dim * 4, out_dim, num_heads=1) 10 11 def forward(self, graph, node_features): 12 h = self.conv1(graph, node_features) 13 h = torch.relu(h) 14 h = self.conv2(graph, h) 15 return h 16
(2)DRL决策器
- 环境建模:将物流货运过程建模为马尔可夫决策过程(MDP),定义状态空间、动作空间与奖励函数。
- 代码示例:
python1from stable_baselines3 import PPO 2from stable_baselines3.common.envs import DummyVecEnv 3import gym 4 5class LogisticsEnv(gym.Env): 6 def __init__(self, graph, vehicle_capacity): 7 super().__init__() 8 self.graph = graph 9 self.vehicle_capacity = vehicle_capacity 10 self.observation_space = gym.spaces.Dict({ 11 'vehicle_pos': gym.spaces.Discrete(len(graph.nodes())), 12 'remaining_load': gym.spaces.Box(low=0, high=vehicle_capacity, shape=(1,)), 13 'orders': gym.spaces.Box(low=0, high=1, shape=(len(graph.nodes()), 3)) # 订单特征:需求量、时间窗开始、结束 14 }) 15 self.action_space = gym.spaces.Discrete(len(graph.nodes())) # 选择下一个配送点 16 17 def step(self, action): 18 # 更新状态、计算奖励、判断是否终止 19 reward = -self.calculate_cost() + self.time_bonus() - self.carbon_penalty() 20 return self._get_obs(), reward, self._is_done(), {} 21 22env = LogisticsEnv(graph, vehicle_capacity=1000) 23model = PPO("MlpPolicy", env, verbose=1) 24model.learn(total_timesteps=10000) 25
3. 多目标优化算法
- NSGA-II实现:使用Pymoo库实现多目标优化,平衡成本、时间与碳排放。
- 代码示例:
python1from pymoo.algorithms.moo.nsga2 import NSGA2 2from pymoo.factory import get_problem 3from pymoo.optimize import minimize 4 5problem = get_problem("ztz") # 自定义物流多目标问题 6algorithm = NSGA2(pop_size=100) 7res = minimize(problem, algorithm, ('n_gen', 200), seed=1, verbose=True) 8
四、系统测试与优化
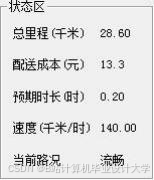
1. 测试指标
- 运输成本:总行驶距离 × 单位距离成本。
- 路径规划时间:从输入到输出最优路径的耗时。
- 时间窗违规率:违反客户时间窗的订单比例。
- 空载率:车辆空载行驶距离占总行驶距离的比例。
- 碳排放:根据车辆类型、行驶距离与燃油消耗计算。
2. 测试方法
- 对比实验:与传统算法(如遗传算法、Dijkstra)进行性能对比,验证系统在运输成本、路径规划时间及时间窗违规率方面的优势。
- 压力测试:在模拟环境中测试系统在大规模物流网络(如1000+节点)下的稳定性与求解效率。
- 实际场景验证:以某物流企业区域配送网络为案例,部署系统并采集实际运行数据,评估优化效果。
3. 优化策略
- 模型压缩:对LSTM模型进行剪枝与量化,减少参数量与推理时间。
- 并行计算:使用Ray框架实现路线规划任务的分布式执行,提升大规模场景下的求解速度。
- 缓存机制:对频繁查询的路线片段(如“仓库A-中转站B”)建立Redis缓存,降低重复计算开销。
五、系统部署与应用
1. 部署环境
- 服务器:配备多核CPU(如Intel Xeon Platinum 8380)、大容量内存(≥256GB)与高速固态硬盘(SSD),支持模型训练与实时推理。
- GPU:NVIDIA A100或RTX 3090,加速GNN与DRL模型训练。
- 操作系统:Linux(Ubuntu 20.04 LTS)或Windows Server 2019。
- 依赖库:Python 3.8+、PyTorch 2.3、TensorFlow 2.12、DGL 0.9、Stable Baselines3 2.0、OR-Tools 9.3、Flask 2.0、Vue.js 3.0。
2. 应用场景
- 城市配送:优化多仓库、多车辆、多客户的配送网络,提升配送效率。
- 长途货运:结合实时交通与天气数据,规划最优城际运输路线,降低运输成本。
- 应急调度:在突发事件(如交通拥堵、自然灾害)下,动态调整路径规划,减少延误风险。
- 供应链协同:整合库存、仓储与运输数据,实现供应链全流程优化。
六、未来演进方向
- 数字孪生集成:与物流仿真平台(如AnyLogic)对接,在虚拟环境中预演路线方案,支持极端场景压力测试。
- 自动驾驶协同:开发V2X通信接口,与自动驾驶卡车实现实时路径同步与速度协调。
- 绿色物流支持:引入碳排放计算模型,优先推荐新能源车辆可达路线,助力“双碳”目标实现。
- 区块链溯源:在路线规划中嵌入商品溯源信息,实现“运输路线-温度记录-签收信息”的全链路可追溯。
本系统通过深度学习与运筹学的深度融合,在物流网络优化的时效性、成本效益与环境友好性方面取得突破,为智能物流领域提供了可扩展的技术框架与商业落地范式。
运行截图




推荐项目
上万套Java、Python、大数据、机器学习、深度学习等高级选题(源码+lw+部署文档+讲解等)
项目案例









优势
1-项目均为博主学习开发自研,适合新手入门和学习使用
2-所有源码均一手开发,不是模版!不容易跟班里人重复!

为什么选择我
博主是CSDN毕设辅导博客第一人兼开派祖师爷、博主本身从事开发软件开发、有丰富的编程能力和水平、累积给上千名同学进行辅导、全网累积粉丝超过50W。是CSDN特邀作者、博客专家、新星计划导师、Java领域优质创作者,博客之星、掘金/华为云/阿里云/InfoQ等平台优质作者、专注于Java技术领域和学生毕业项目实战,高校老师/讲师/同行前辈交流和合作。
🍅✌感兴趣的可以先收藏起来,点赞关注不迷路,想学习更多项目可以查看主页,大家在毕设选题,项目代码以及论文编写等相关问题都可以给我留言咨询,希望可以帮助同学们顺利毕业!🍅✌
源码获取方式
🍅由于篇幅限制,获取完整文章或源码、代做项目的,拉到文章底部即可看到个人联系方式。🍅
点赞、收藏、关注,不迷路,下方查↓↓↓↓↓↓获取联系方式↓↓↓↓↓↓↓↓

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐


 8
8 0
0- 0



 已为社区贡献284条内容
已为社区贡献284条内容

所有评论(0)