双侧独立电驱动车辆转向控制:Matlab/Simulink建模探索
matlab/simulink建模:双侧独立电驱动车辆转向控制 履带车考虑滑转滑移的转向控制模型,包含双侧独立电驱动履带车动力学模型,车速和横摆角速度控制器(基于pi和SMC两种控制算法对比),作业工具模型等。 参考文献 :双侧独立电驱动履带车辆转向控制研究(哈工大) 大功率履带拖拉机耕耘机组稳定性研究(安徽农大)
在车辆动力学控制领域,双侧独立电驱动车辆的转向控制是一个极具挑战性与趣味性的课题。尤其是履带车,由于其特殊的行走机构,在转向过程中会出现滑转滑移现象,这就需要更为精细的控制模型来实现稳定且精准的转向。今天,咱们就唠唠如何基于Matlab/Simulink搭建这样一个控制模型。
一、双侧独立电驱动履带车动力学模型
履带车的动力学模型是整个转向控制的基础。它需要综合考虑车辆的质量、转动惯量、履带与地面的接触力等多个因素。以一个简化的二维模型为例,我们可以用以下方程来描述车辆的运动:
\[
\begin{cases}
m\dot{v}x = F{xf} + F{xr} - F{res} \\
m\dot{v}y = F{yf} + F_{yr} \\
Iz\dot{\omega} = lf(F{yf} - F{yr}) + \frac{t}{2}(F{xf} - F{xr})
\end{cases}
\]
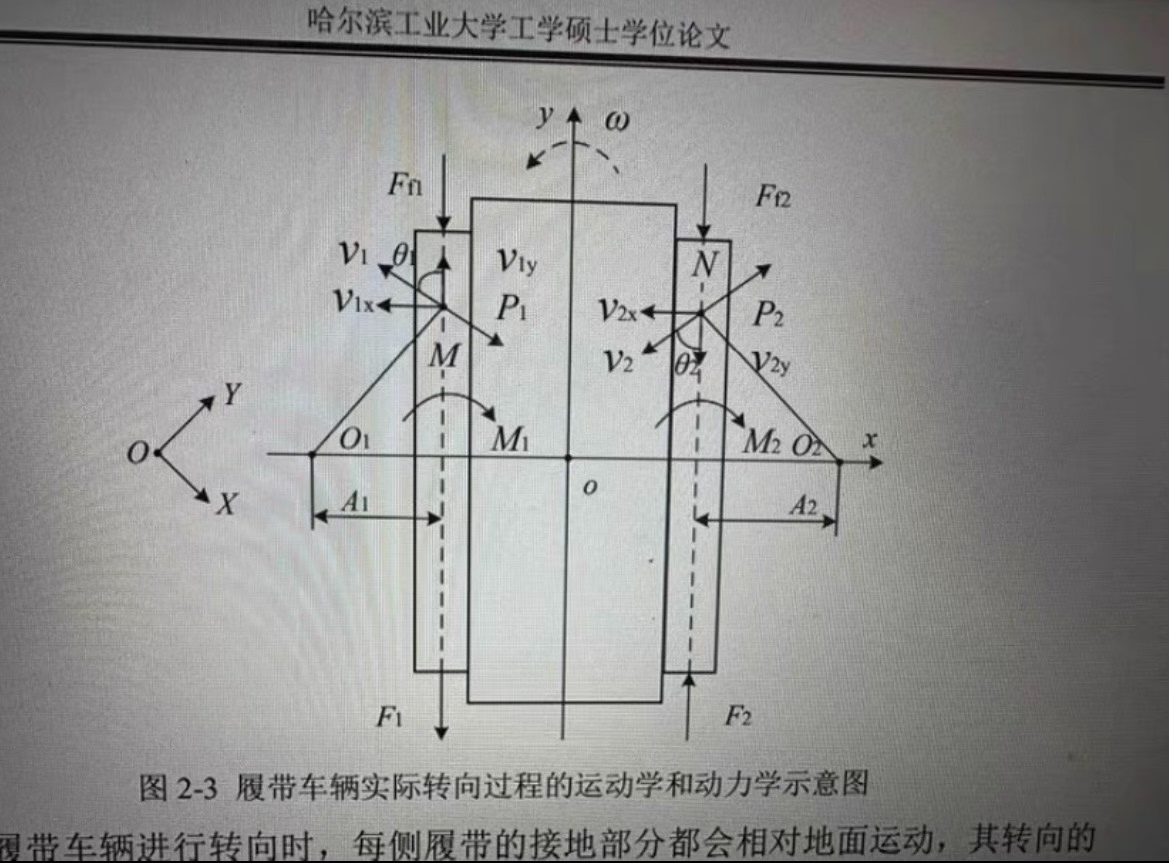
这里,$m$是车辆质量,$vx, vy$分别是车辆在$x$和$y$方向的速度,$\omega$是横摆角速度,$F{xf}, F{xr}$是前后履带在$x$方向的力,$F{yf}, F{yr}$是前后履带在$y$方向的力,$F{res}$是行驶阻力,$Iz$是车辆绕$z$轴的转动惯量,$l_f$是质心到前履带的距离,$t$是履带间距。
在Matlab中,我们可以通过编写函数来实现这个动力学模型的计算,代码如下:
function [dvx, dvy, domega] = trackVehicleDynamics(m, Iz, lf, t, Fxf, Fxr, Fyf, Fyr, Fres, vx, vy, omega)
% 计算车辆在x方向的加速度
dvx = (Fxf + Fxr - Fres) / m;
% 计算车辆在y方向的加速度
dvy = (Fyf + Fyr) / m;
% 计算车辆的横摆角加速度
domega = (lf * (Fyf - Fyr) + t / 2 * (Fxf - Fxr)) / Iz;
end这段代码接受车辆的参数和各方向的力,通过上述动力学方程计算出车辆在$x$方向、$y$方向的加速度以及横摆角加速度。
二、车速和横摆角速度控制器
(一)PI控制算法
PI控制器是一种经典的反馈控制器,通过比例(P)和积分(I)环节来调节控制量,使其跟踪目标值。对于车速和横摆角速度控制,我们可以分别设计PI控制器。
以车速PI控制为例,其控制律可以表示为:
\[ u = Kp (v{ref} - v) + Ki \int0^t (v_{ref} - v) dt \]
其中,$u$是控制输出,$Kp$是比例系数,$Ki$是积分系数,$v_{ref}$是目标车速,$v$是当前车速。
matlab/simulink建模:双侧独立电驱动车辆转向控制 履带车考虑滑转滑移的转向控制模型,包含双侧独立电驱动履带车动力学模型,车速和横摆角速度控制器(基于pi和SMC两种控制算法对比),作业工具模型等。 参考文献 :双侧独立电驱动履带车辆转向控制研究(哈工大) 大功率履带拖拉机耕耘机组稳定性研究(安徽农大)
在Matlab/Simulink中搭建车速PI控制器模块相对简单,我们可以利用Simulink自带的PID Controller模块,只需调整$Kp$和$Ki$参数即可。在Matlab代码中实现一个简单的PI控制器如下:
classdef PIController
properties
Kp
Ki
integral
lastError
end
methods
function obj = PIController(Kp, Ki)
obj.Kp = Kp;
obj.Ki = Ki;
obj.integral = 0;
obj.lastError = 0;
end
function controlOutput = update(obj, setpoint, processVariable)
error = setpoint - processVariable;
obj.integral = obj.integral + error;
pTerm = obj.Kp * error;
iTerm = obj.Ki * obj.integral;
controlOutput = pTerm + iTerm;
obj.lastError = error;
end
end
end在上述代码中,我们定义了一个PIController类,通过构造函数初始化$Kp$和$Ki$,update方法则根据当前的目标值和实际值计算出控制输出。
(二)SMC控制算法
滑模控制(SMC)是一种非线性控制策略,它对系统的参数变化和外部干扰具有较强的鲁棒性。SMC的核心思想是设计一个滑模面,使系统状态在有限时间内到达并保持在滑模面上运动。
对于横摆角速度控制,我们可以设计如下滑模面:
\[ s = \omega - \omega_{ref} \]
然后通过控制律使系统状态向滑模面趋近并保持在滑模面上。SMC控制律一般包含等效控制项和切换控制项,例如:
\[ u = u{eq} + u{sw} \]
其中,等效控制项$u{eq}$使系统在滑模面上运动,切换控制项$u{sw}$使系统状态趋近滑模面。
在Matlab中实现横摆角速度SMC控制的代码示例(简化版):
function u = smcController(omega, omegaRef, K, eta)
s = omega - omegaRef;
u_eq = - (1 / 3) * s; % 简单等效控制项示例
u_sw = - K * sign(s); % 切换控制项,K为增益,sign为符号函数
u = u_eq + u_sw;
end这段代码接受当前横摆角速度omega和目标横摆角速度omegaRef,通过滑模面计算出控制输出u。
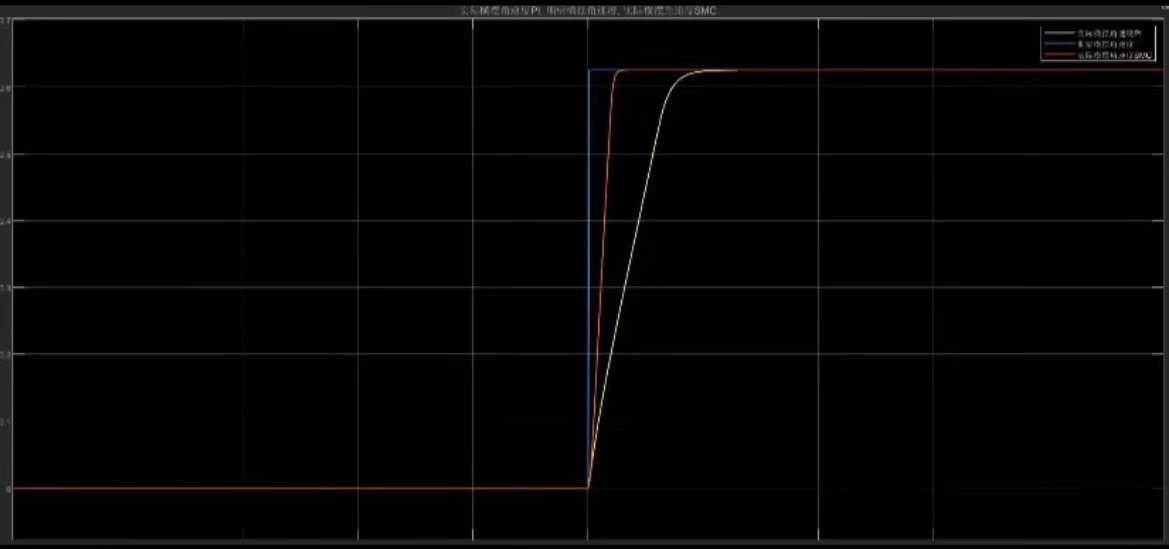
通过对比PI和SMC两种控制算法,我们可以清晰地看到它们在不同工况下的性能差异。PI控制简单易实现,但对参数变化和干扰的鲁棒性相对较弱;而SMC控制虽然设计较为复杂,但鲁棒性强,能在复杂环境下更好地保持控制性能。
三、作业工具模型
除了车辆本身的动力学和转向控制,作业工具模型也是整个系统的重要组成部分。比如对于履带拖拉机,其耕耘作业工具的工作状态会影响车辆的行驶稳定性和转向性能。
作业工具模型需要考虑工具与土壤的相互作用,这通常是一个复杂的非线性过程。可以通过实验数据拟合或者基于物理原理建立模型。例如,我们可以用一个简单的力-位移关系来模拟耕耘工具在土壤中的阻力:
\[ F_{tool} = k \cdot x + b \]
其中,$F_{tool}$是工具受到的阻力,$x$是工具的位移,$k$和$b$是通过实验确定的系数。
在Simulink中,可以用一个简单的Gain模块和Sum模块来搭建这个模型,将计算得到的阻力反馈到车辆动力学模型中,以综合考虑作业工具对车辆转向控制的影响。
四、总结
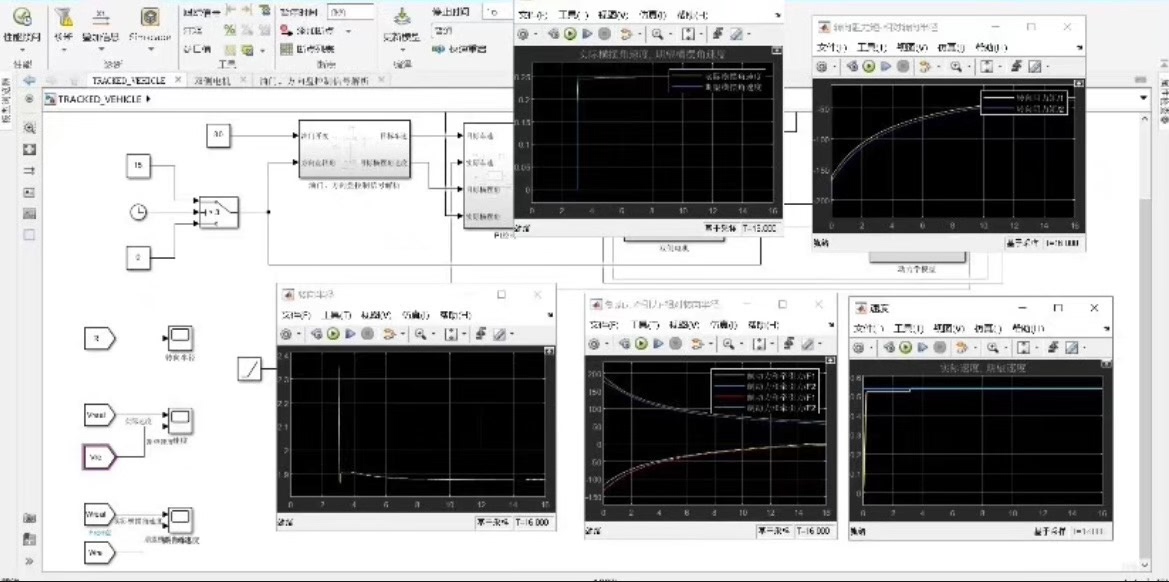
双侧独立电驱动履带车的转向控制是一个涉及多学科知识的复杂系统。通过Matlab/Simulink建模,我们能够有效地将车辆动力学模型、车速和横摆角速度控制器以及作业工具模型整合在一起,对不同控制算法进行对比和优化。这不仅有助于我们深入理解车辆转向控制的原理,也为实际工程应用提供了有力的理论支持和仿真验证手段。希望本文能给各位对该领域感兴趣的朋友一些启发,大家一起在这个充满挑战的领域继续探索!
参考文献:
- 《双侧独立电驱动履带车辆转向控制研究》(哈工大)
- 《大功率履带拖拉机耕耘机组稳定性研究》(安徽农大)

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐



 7
7 0
0- 0



 已为社区贡献8条内容
已为社区贡献8条内容

所有评论(0)