基于全阶磁链观测器的异步电机矢量控制
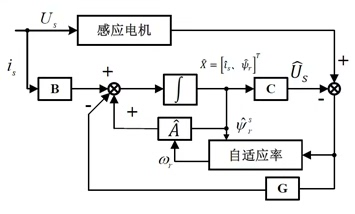
基于全阶磁链观测器的异步电机矢量控制 全阶磁链观测器的主要思想是将异步电机模型作为参考,把状态估计的方程作为可调节部分。 这两部分具有相同物理意义的输出量,利用两个部分的输出量误差再经过反馈校正通道对状态观测值进行修正,使观测值快速地跟踪上实际值。 模型参考自适应的思想有效地提高了全阶磁链观测器的动态性能和抗扰动性能。
矢量控制与磁链观测器的重要性
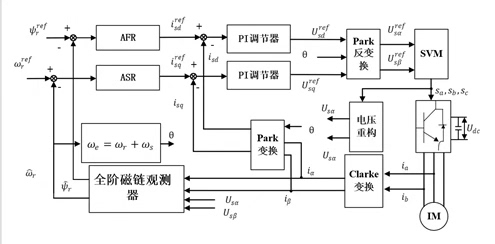
在现代电机控制系统中,矢量控制(Vector Control)是一种广泛采用的技术,尤其在高性能异步电机(Induction Motor)的驱动应用中,矢量控制能够显著提升系统的动态响应和控制精度。然而,矢量控制的核心在于对电机内部状态的准确估计,特别是磁链(Flux Linkage)和转子速度的实时计算。这正是全阶磁链观测器(Full-Order Flux Observer)大显身手的地方。
全阶磁链观测器的基本思想是将异步电机的数学模型作为参考系统,同时构建一个状态估计系统。通过对比两个系统在输出量上的差异,并利用反馈校正机制,对状态估计值进行动态调整。这种模型参考自适应(Model Reference Adaptive System, MRAS)的思想不仅提升了观测器的动态响应速度,还显著增强了系统在面对外部扰动时的鲁棒性。
下面,我们通过一段简化的代码,来看看全阶磁链观测器是如何工作的:
% 电机参数
R_r = 0.5; % 转子电阻
L_r = 0.1; % 转子电感
R_s = 0.5; % 定子电阻
L_s = 0.1; % 定子电感
L_m = 0.05; % 互感
p = 2; % 极对数
m_n = 50; % 采样频率
Ts = 1/m_n; % 采样时间
% 初始化
x_hat = [0; 0; 0]; % 状态估计值:转子磁链ψ_r,定子磁链ψ_s,转子速度ω
y_ref = [0; 0]; % 参考系统的输出
y_est = [0; 0]; % 估计系统的输出
e = zeros(length(y_ref), 1); % 输出误差
sigma = 0.1 * eye(3); % 自适应律的调整因子
for k = 1:N
% 参考系统的状态方程
dx_ref = (1/Ts) * [ -R_r/L_r * x_ref(1) + (R_s/L_m) * x_est(2); ...
-R_s/L_s * x_est(2) + (R_r/L_m) * x_ref(1); ...
p * (x_est(3) - x_ref(3)) ];
x_ref = x_ref + dx_ref;
% 估计系统的状态方程
dx_est = (1/Ts) * [ -R_r/L_r * x_est(1) + (R_s/L_m) * x_est(2) - sigma(1,1)*e(1); ...
-R_s/L_s * x_est(2) + (R_r/L_m) * x_est(1) - sigma(2,2)*e(2); ...
p * x_est(3) - sigma(3,3)*e(3) ];
x_est = x_est + dx_est;
% 计算输出误差
y_ref = [x_ref(1); x_ref(2)];
y_est = [x_est(1); x_est(2)];
e = y_ref - y_est;
% 自适应律更新
sigma = sigma + alpha * e * e';
end从这段代码中可以看到,全阶磁链观测器的核心是一个自适应调节过程。通过不断比较参考系统和估计系统的输出误差,并利用自适应律(Adaptive Law)对观测器的参数进行动态调整,使得估计值能够快速跟踪实际值。这种机制不仅提升了系统的动态性能,还增强了抗扰动能力。
基于全阶磁链观测器的异步电机矢量控制 全阶磁链观测器的主要思想是将异步电机模型作为参考,把状态估计的方程作为可调节部分。 这两部分具有相同物理意义的输出量,利用两个部分的输出量误差再经过反馈校正通道对状态观测值进行修正,使观测值快速地跟踪上实际值。 模型参考自适应的思想有效地提高了全阶磁链观测器的动态性能和抗扰动性能。
全阶磁链观测器的优势
与传统的单阶或双阶观测器相比,全阶磁链观测器具有以下几个显著优点:
- 全阶状态估计:能够同时估计转子和定子的磁链,以及转子速度,提供更全面的状态信息。
- 动态性能优异:利用模型参考自适应思想,显著提升了系统的响应速度。
- 鲁棒性强:即使在参数变化或外部干扰的情况下,也能保持较高的估计精度。
当然,全阶磁链观测器也有一些不足之处,比如计算量较大,对硬件的要求也相对较高。但在现代高性能计算技术的支持下,这些不足完全可以被克服。
总结
全阶磁链观测器是矢量控制技术中不可或缺的一部分,它通过模型参考自适应的思想,实现了对电机内部状态的高精度估计。无论是理论上的优雅性,还是实际应用中的有效性,全阶磁链观测器都展现出了强大的生命力。对于从事电机控制领域的工程师和研究人员来说,深入理解全阶磁链观测器的工作原理和实现方法,无疑是一项非常重要的技能。
希望这篇文章能够让大家对全阶磁链观测器有一个更深入的认识,同时代码的示例也能帮助大家更好地理解其实际应用。如果有兴趣,可以试着在实验室或仿真环境中运行这段代码,亲身体验全阶磁链观测器的实际表现!

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐
 8
8 0
0- 0



 已为社区贡献12条内容
已为社区贡献12条内容

所有评论(0)