探索三相PWM整流器双闭环仿真模型
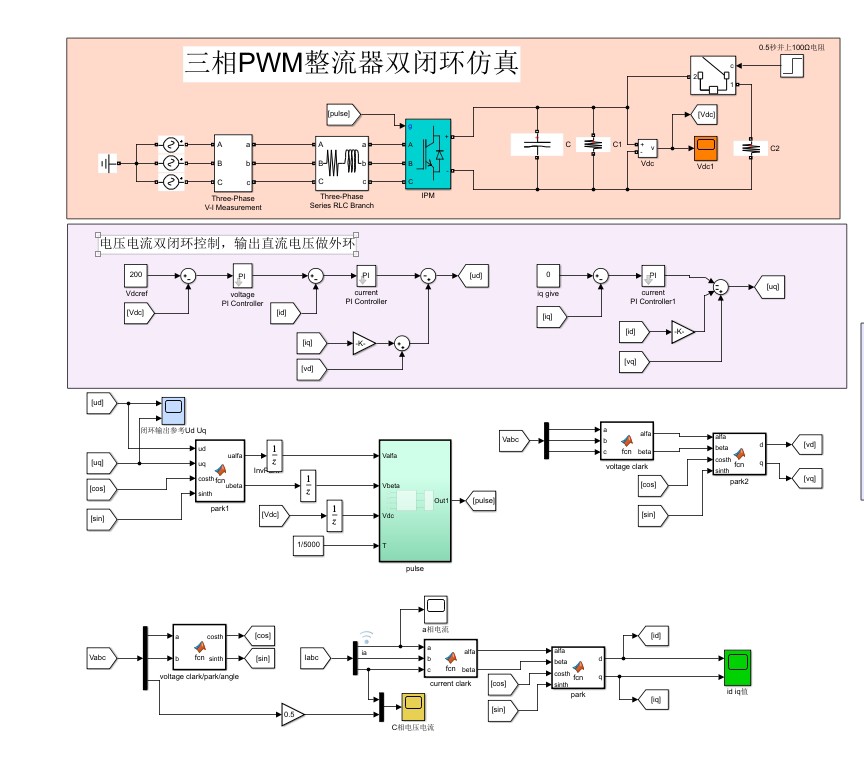
三相PWM整流器双闭环仿真模型 模型中包含:主电路,坐标变换,电压电流双环PI控制器,SVPWM控制 1.功率因数1,THD仅1.2% 2.模型闭环输出电压200VDC 3.输出功率调节输出电阻阻值计算功率 4.三相六开关七段式SVPWM仿真,交-直-交变压 5.SVPWM控制是根据电机负载需要尽量圆形旋转磁场来控制电机旋转的要求通过合成电压空间矢量得到IGBT触发信号,它的直流电压的利用率比SPWM方式高15%
在电力电子领域,三相PWM整流器双闭环仿真模型一直是个热门话题。今天咱们就来深入聊聊这个有趣又实用的模型,它可是包含了不少精妙的设计。
模型组成部分剖析
主电路
主电路是整个系统的“骨架”,它负责承载电能的传输与变换。在三相PWM整流器中,主电路通常由三相交流电源、电感、电容以及功率开关器件(如IGBT)等构成。以一个简单的三相PWM整流器主电路为例,其基本结构如下:
# 简单示意主电路部分参数
ac_voltage = 380 # 三相交流输入电压
dc_voltage = 200 # 目标直流输出电压
inductor_value = 0.01 # 电感值
capacitor_value = 0.0001 # 电容值这里通过设置交流输入电压、目标直流输出电压以及电感电容值,初步构建起主电路的参数基础。这些参数对于后续系统的性能有着关键影响,比如电感值的大小会影响电流的纹波,电容值则对直流输出电压的稳定性有重要作用。
坐标变换
坐标变换在这个模型里起着“翻译”的作用,它把三相静止坐标系下的物理量转换到两相旋转坐标系下,方便进行控制。常用的坐标变换有Clark变换和Park变换。
Clark变换将三相静止坐标系(abc坐标系)变换到两相静止坐标系(αβ坐标系),公式如下:
\[
\begin{bmatrix}
i_{\alpha} \\
i_{\beta}
\end{bmatrix}
= \sqrt{\frac{2}{3}}
\begin{bmatrix}
1 & -\frac{1}{2} & -\frac{1}{2} \\
0 & \frac{\sqrt{3}}{2} & -\frac{\sqrt{3}}{2}
\end{bmatrix}
\begin{bmatrix}
i_a \\
i_b \\
i_c
\end{bmatrix}
\]
在代码中实现Clark变换可以这样写:
import numpy as np
def clark_transform(i_a, i_b, i_c):
transform_matrix = np.sqrt(2 / 3) * np.array([[1, -1 / 2, -1 / 2],
[0, np.sqrt(3) / 2, -np.sqrt(3) / 2]])
current_abc = np.array([i_a, i_b, i_c])
current_alpha_beta = np.dot(transform_matrix, current_abc)
return current_alpha_beta[0], current_alpha_beta[1]
Park变换则是将两相静止坐标系(αβ坐标系)变换到两相旋转坐标系(dq坐标系),公式为:
三相PWM整流器双闭环仿真模型 模型中包含:主电路,坐标变换,电压电流双环PI控制器,SVPWM控制 1.功率因数1,THD仅1.2% 2.模型闭环输出电压200VDC 3.输出功率调节输出电阻阻值计算功率 4.三相六开关七段式SVPWM仿真,交-直-交变压 5.SVPWM控制是根据电机负载需要尽量圆形旋转磁场来控制电机旋转的要求通过合成电压空间矢量得到IGBT触发信号,它的直流电压的利用率比SPWM方式高15%
\[
\begin{bmatrix}
i_d \\
i_q
\end{bmatrix}
=
\begin{bmatrix}
\cos\theta & \sin\theta \\
-\sin\theta & \cos\theta
\end{bmatrix}
\begin{bmatrix}
i_{\alpha} \\
i_{\beta}
\end{bmatrix}
\]
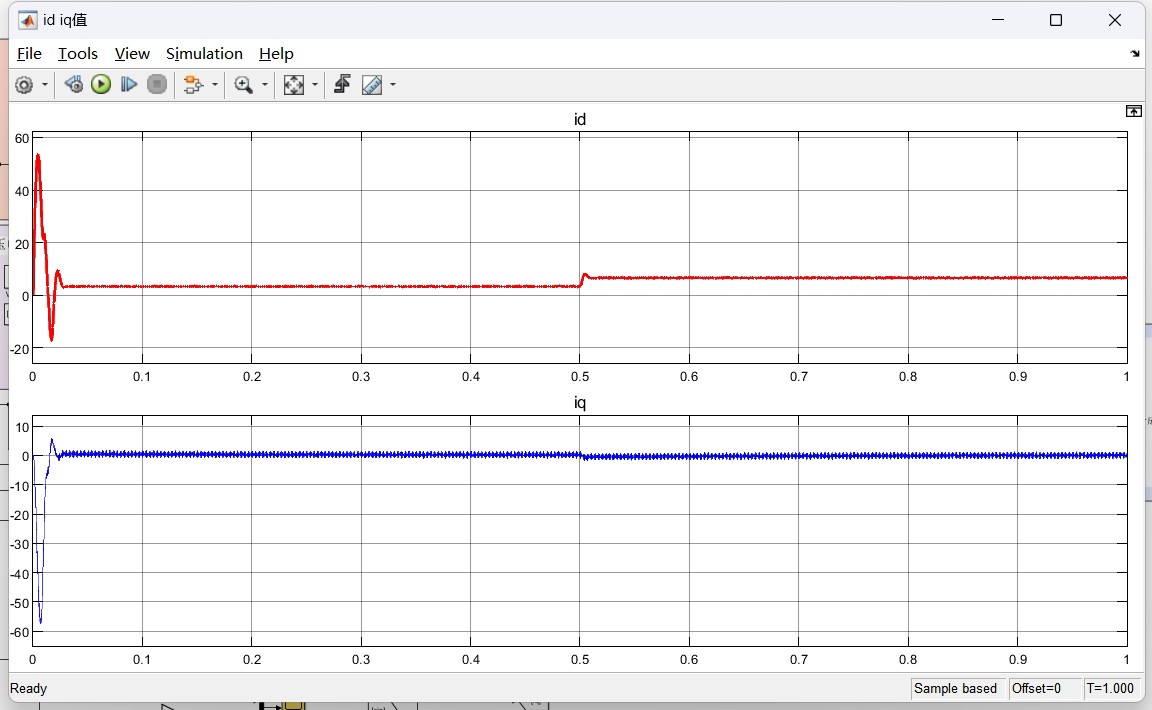
这里的\(\theta\)是旋转角度。坐标变换后,就可以更方便地对电流进行解耦控制,提升系统性能。
电压电流双环PI控制器
双环PI控制器是模型的“智能大脑”,通过电压外环和电流内环的协同工作,实现对整流器输出的精确控制。
电压外环的作用是稳定直流输出电压。以Python代码简单示意电压外环PI控制器的结构:
class VoltagePI:
def __init__(self, kp, ki):
self.kp = kp
self.ki = ki
self.integral = 0
self.prev_error = 0
def update(self, setpoint, feedback):
error = setpoint - feedback
self.integral += error
p_term = self.kp * error
i_term = self.ki * self.integral
output = p_term + i_term
self.prev_error = error
return output
这里通过定义比例系数\(kp\)和积分系数\(ki\),利用当前误差和积分误差来计算输出。电流内环则快速跟踪电压外环输出的电流指令,实现对网侧电流的控制,使功率因数接近1。
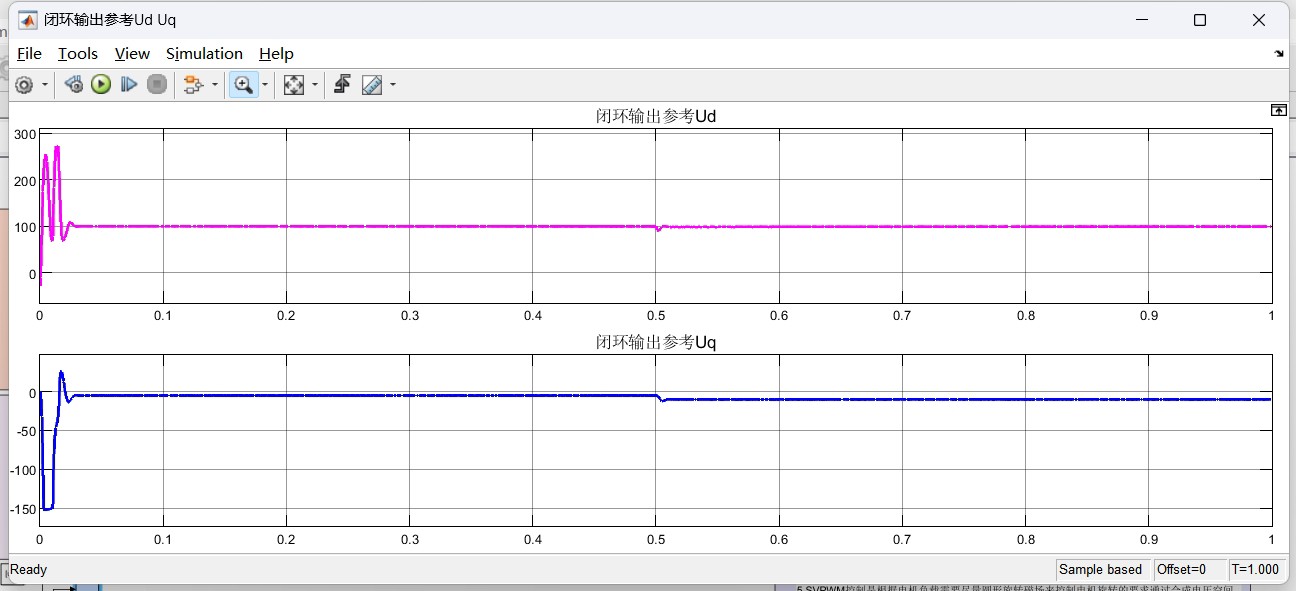
SVPWM控制
SVPWM控制就像是系统的“节奏大师”,它根据电机负载需要尽量产生圆形旋转磁场来控制电机旋转的要求,通过合成电压空间矢量得到IGBT触发信号。而且它的直流电压利用率比SPWM方式高15%。
在三相六开关七段式SVPWM仿真中,涉及到交 - 直 - 交变压的过程。下面简单展示SVPWM控制中计算基本电压矢量作用时间的代码:
def svpwm_calculation(ud, uq, T):
# 省略一些中间变量计算
t1 = calculate_t1(ud, uq)
t2 = calculate_t2(ud, uq)
t0 = (T - t1 - t2) / 2
return t0, t1, t2
这里\(ud\)和\(uq\)是dq坐标系下的电压分量,\(T\)是采样周期,通过计算得到不同基本电压矢量的作用时间,进而生成IGBT触发信号。
模型的卓越性能
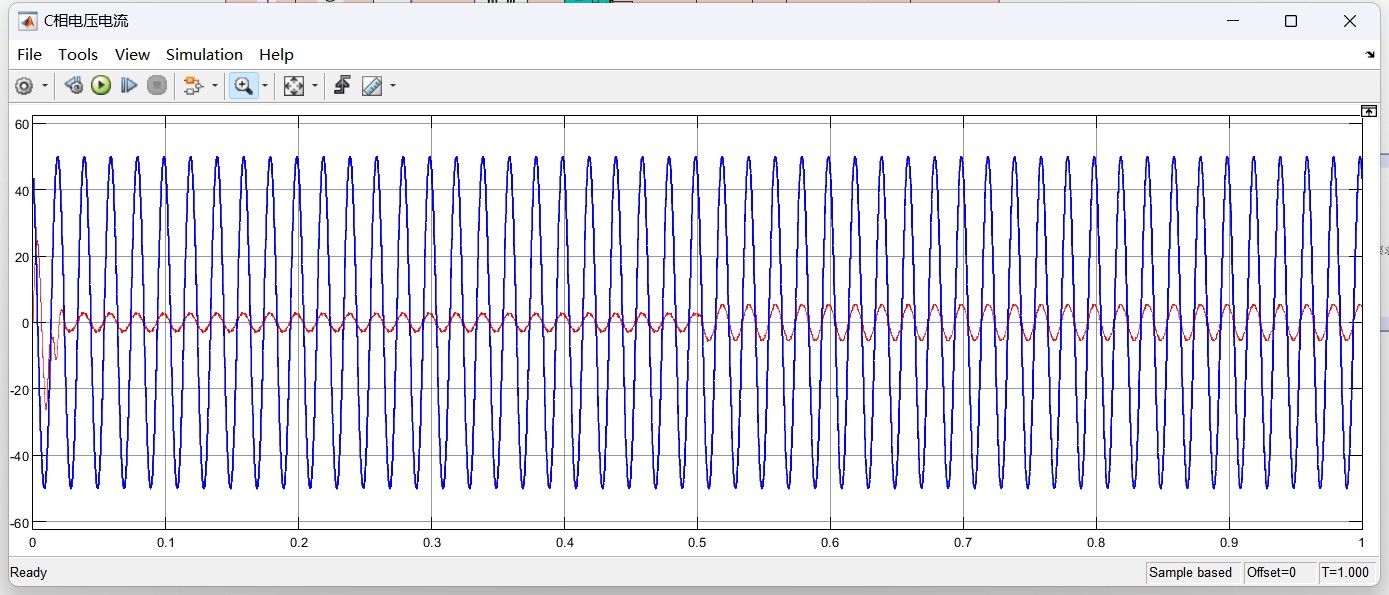
功率因数与THD
这个模型可以实现功率因数达到1,THD(总谐波失真)仅1.2%。功率因数接近1意味着电能得到了高效利用,减少了无功功率的损耗。而低THD则保证了输出电流的高质量,减少了对电网的谐波污染。
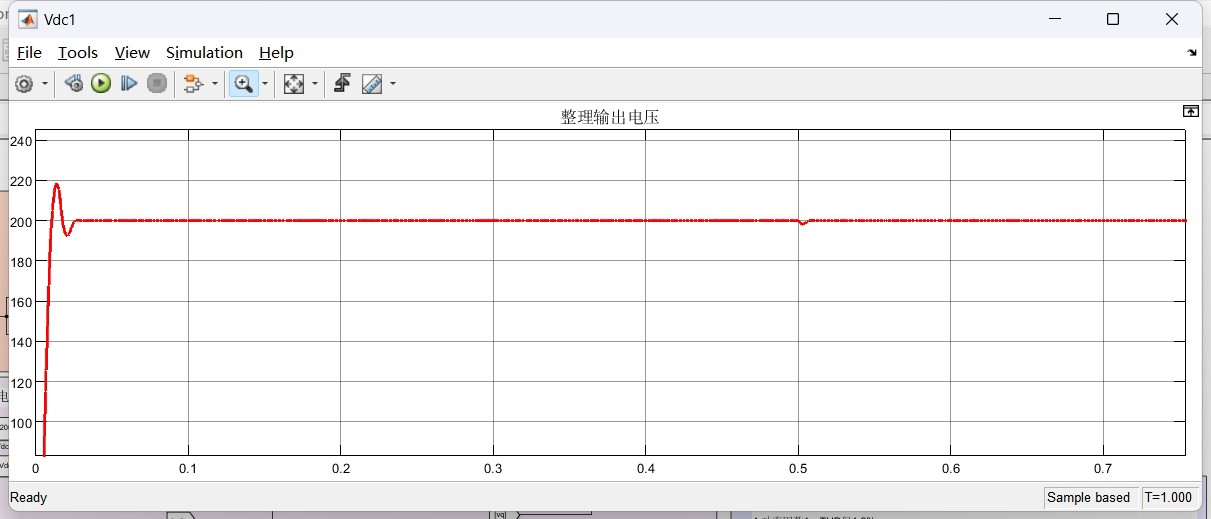
闭环输出电压
模型闭环输出电压稳定在200VDC,这为后续的用电设备提供了稳定的直流电源。通过电压电流双环PI控制器的精确调节,使得输出电压能够在各种工况下都保持稳定。
输出功率调节
输出功率可以通过调节输出电阻阻值来计算功率。这种灵活的功率调节方式,使得系统能够适应不同的负载需求,提高了系统的实用性。
三相PWM整流器双闭环仿真模型通过其巧妙的结构设计和先进的控制策略,展现出了卓越的性能,在电力电子领域有着广泛的应用前景。无论是在工业生产还是新能源发电等领域,都能发挥重要作用。希望今天的分享能让大家对这个模型有更深入的理解。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐


 0
0 0
0- 0



 已为社区贡献17条内容
已为社区贡献17条内容

所有评论(0)