无人艇(USV)基于NMPC的动态避障之旅
无人艇、无人船usv nmpc预测控制,有详细的代码解释。 能够实现动态避障都有详细的注释和代码。 几乎每行都有。 需要下载matlab以及casadi求解器,不然无法求解。 仿真对象无人艇:WAM-V,双螺旋桨驱动的双体船;避障实现的方法:NMPC约束设置障碍物与无人艇的距离大于碰撞距离。
在无人艇(USV)的自主航行领域,预测控制算法如NMPC(非线性模型预测控制)扮演着至关重要的角色,它能让无人艇在复杂环境中实现动态避障,安全且高效地驶向目标。今天咱们就来深入探索一下这个有趣的过程,同时借助Matlab与Casadi求解器来将理论落地。
前期准备
首先,强烈建议先下载Matlab以及Casadi求解器,Casadi是一款强大的符号计算和数值优化库,在NMPC的求解过程中起着关键作用。没有它们,咱们的无人艇避障大计可就无法顺利求解咯。
仿真对象 - WAM - V无人艇
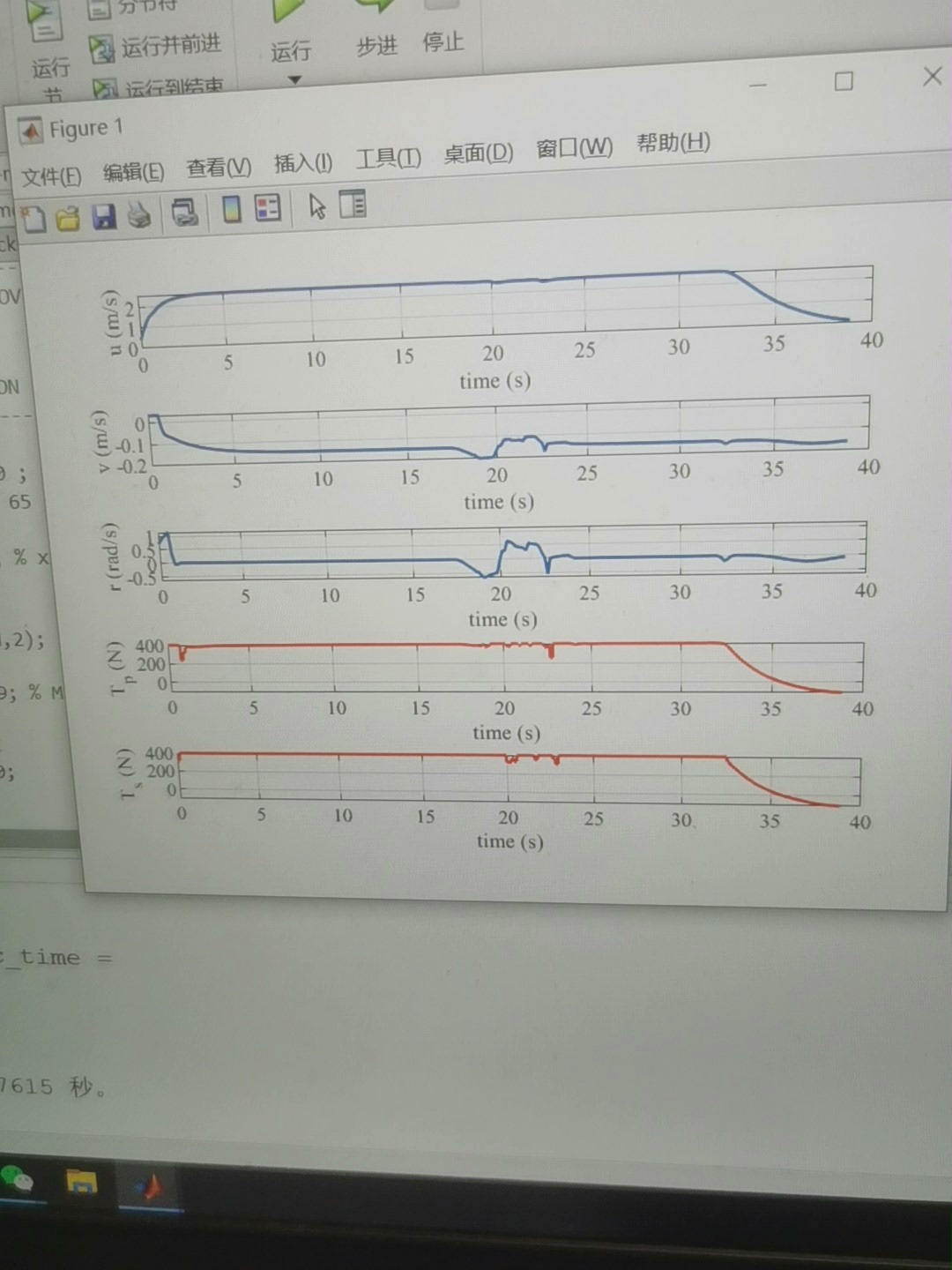
本次聚焦的无人艇是WAM - V,这是一艘双螺旋桨驱动的双体船。双螺旋桨驱动赋予了它良好的机动性,能够灵活地改变航行方向与速度,这为实现动态避障提供了硬件基础。
NMPC避障核心思路
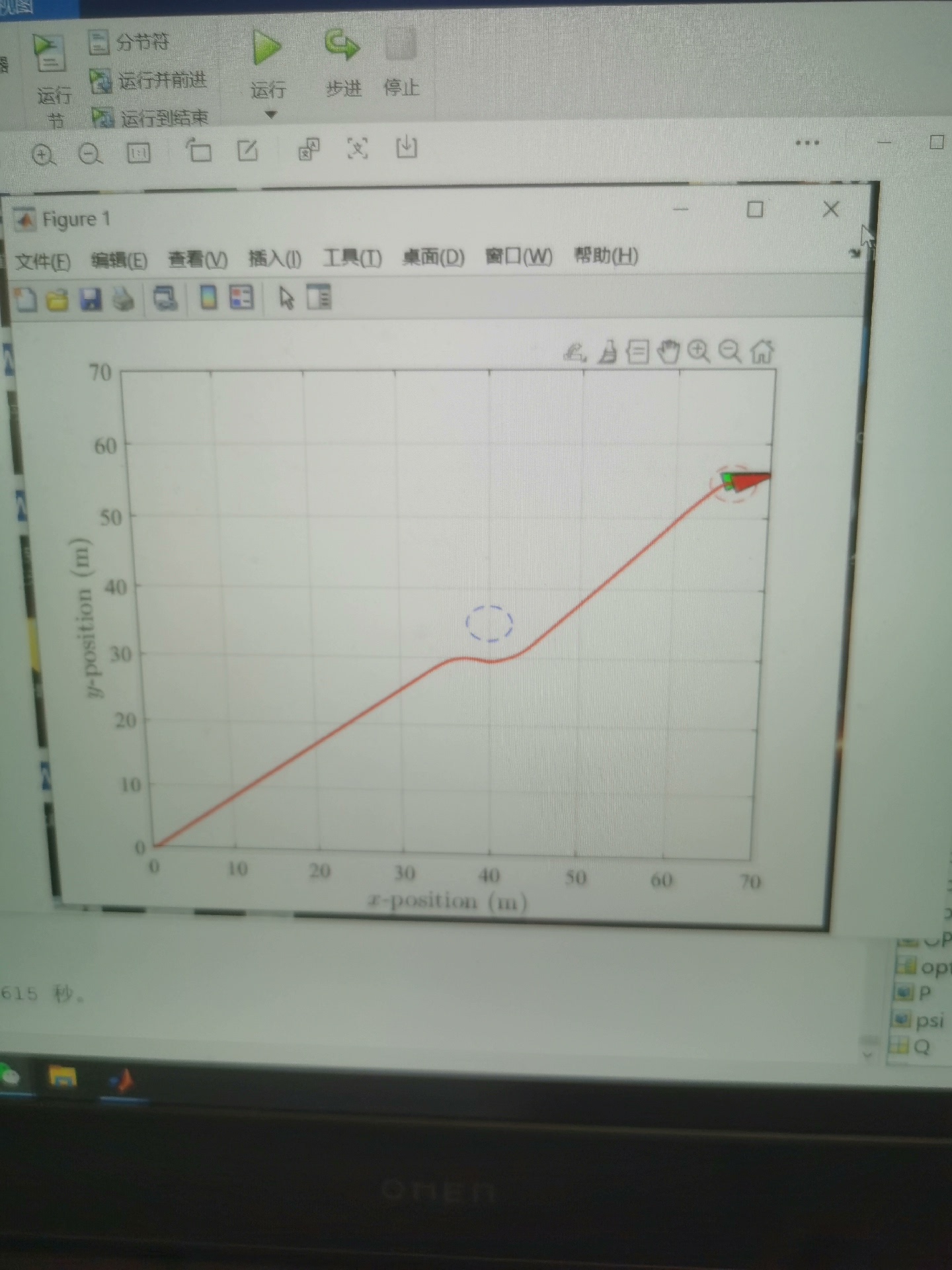
实现动态避障的关键在于NMPC的约束设置。简单来说,就是要确保障碍物与无人艇的距离始终大于碰撞距离。假设碰撞距离为$d{collision}$,无人艇位置为$(x{usv}, y{usv})$,障碍物位置为$(x{obs}, y_{obs})$,那么约束条件就可以写成:
$\sqrt{(x{usv} - x{obs})^2 + (y{usv} - y{obs})^2} > d_{collision}$
代码实现与解析
接下来就是激动人心的代码环节啦!
1. 初始化相关参数
% 定义时间步长
dt = 0.1;
% 预测时域
N = 50;
% 碰撞距离
d_collision = 2;
% 无人艇初始位置
x0 = [0; 0; 0]; 这里我们定义了时间步长dt,它决定了每次状态更新的时间间隔,较小的时间步长可以带来更精确的模拟,但也会增加计算量。预测时域N表示我们向前预测多少个时间步来优化控制输入。碰撞距离d_collision就是前面提到的关键安全距离。无人艇的初始位置x0,这里假设无人艇从原点出发,并且初始航向角为0。
2. 定义Casadi变量与模型
% 导入Casadi函数库
import casadi.*
% 状态变量:x位置, y位置, 航向角
X = SX.sym('X', 3, N + 1);
% 控制输入:线速度, 角速度
U = SX.sym('U', 2, N);
% 无人艇运动学模型
f = @(x, u) [u(1) * cos(x(3));
u(1) * sin(x(3));
u(2)]; 通过import casadi.*导入Casadi库,为后续使用其强大功能做准备。我们定义了状态变量X,它是一个三维矩阵,分别对应无人艇的x位置、y位置和航向角,时间维度从0到N + 1,N + 1是因为包含了初始时刻。控制输入U则是二维矩阵,分别表示线速度和角速度。f函数描述了无人艇的运动学模型,根据当前状态x和控制输入u来更新下一时刻的状态。
3. 构建NMPC优化问题
% 目标函数:最小化到目标点的距离与控制输入变化
obj = 0;
for k = 1:N
% 计算到目标点(10, 10)的距离
obj = obj + (X(1, k) - 10)^2 + (X(2, k) - 10)^2;
% 控制输入变化惩罚
if k > 1
obj = obj + sum((U(:, k) - U(:, k - 1)).^2);
end
end
% 约束条件
g = [];
for k = 1:N
% 状态更新约束
x_next = X(:, k) + dt * f(X(:, k), U(:, k));
g = [g; X(:, k + 1) - x_next];
% 避障约束:假设障碍物位置(5, 5)
obs_x = 5; obs_y = 5;
dist = sqrt((X(1, k) - obs_x)^2 + (X(2, k) - obs_y)^2);
g = [g; dist - d_collision];
end
% 初始状态约束
g = [g; X(:, 1) - x0];
% 定义优化问题
prob = struct('f', obj, 'x', [reshape(X, [], 1); reshape(U, [], 1)], 'g', g); 目标函数obj的构建分两部分。一是最小化无人艇到目标点(10, 10)的距离,这样无人艇就会朝着目标前进。二是对控制输入变化进行惩罚,避免控制输入变化过于剧烈,使无人艇运动更平滑。
无人艇、无人船usv nmpc预测控制,有详细的代码解释。 能够实现动态避障都有详细的注释和代码。 几乎每行都有。 需要下载matlab以及casadi求解器,不然无法求解。 仿真对象无人艇:WAM-V,双螺旋桨驱动的双体船;避障实现的方法:NMPC约束设置障碍物与无人艇的距离大于碰撞距离。
约束条件g部分,首先是状态更新约束,依据无人艇运动学模型确保状态的合理更新。接着是避障约束,这里假设障碍物位置在(5, 5),计算无人艇与障碍物的距离并确保大于碰撞距离。最后加上初始状态约束,保证无人艇从设定的初始位置出发。通过struct函数将目标函数、优化变量和约束条件整合为一个优化问题prob。
4. 求解优化问题
% 选择求解器
opts = struct('ipopt.print_level', 0, 'print_time', 0);
solver = nlpsol('solver', 'ipopt', prob, opts);
% 初始猜测值
x0_nlp = [repmat(x0, 1, N + 1); repmat([0; 0], 1, N)];
% 求解
sol = solver('x0', x0_nlp, 'lbx', [], 'ubx', [], 'lbg', 0, 'ubg', 0);
% 提取结果
X_opt = reshape(sol.x(1:3 * (N + 1)), 3, N + 1);
U_opt = reshape(sol.x(3 * (N + 1) + 1:end), 2, N); 通过nlpsol函数选择ipopt求解器来求解我们构建的优化问题,并设置一些求解器选项,如不打印求解过程信息以提高运行效率。提供初始猜测值x0nlp,然后调用求解器得到结果sol。从结果中提取优化后的状态轨迹Xopt和控制输入U_opt,这些数据就可以用来驱动无人艇在仿真环境中安全地避开障碍物驶向目标。
以上就是基于NMPC实现无人艇动态避障的大致过程啦,希望大家能在Matlab的世界里尽情探索无人艇自主航行的奥秘!

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐



 0
0 0
0- 0



 已为社区贡献29条内容
已为社区贡献29条内容

所有评论(0)