基于EKF扩展卡尔曼滤波算法的电池SOC估计及Simulink建模
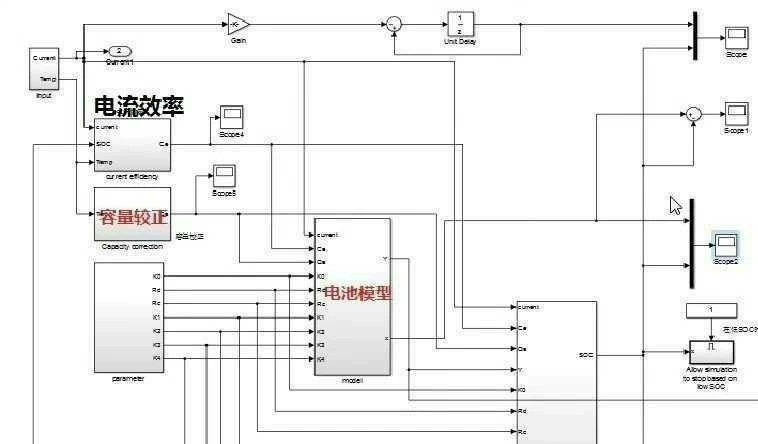
EKF扩展卡尔曼滤波算法做电池SOC估计,在Simulink环境下对电池进行建模,包括: 1.电池模型 2.电池容量校正与温度补偿 3.电流效率 采用m脚本编写EKF扩展卡尔曼滤波算法,在Simulink模型运行时调用m脚本计算SOC,通过仿真结果可以看出,估算的精度很高,最大误差小于0.4%
在电池管理系统中,准确估计电池的荷电状态(State of Charge, SOC)至关重要。本文将探讨如何利用EKF扩展卡尔曼滤波算法在Simulink环境下对电池进行建模,并实现高精度的SOC估计。
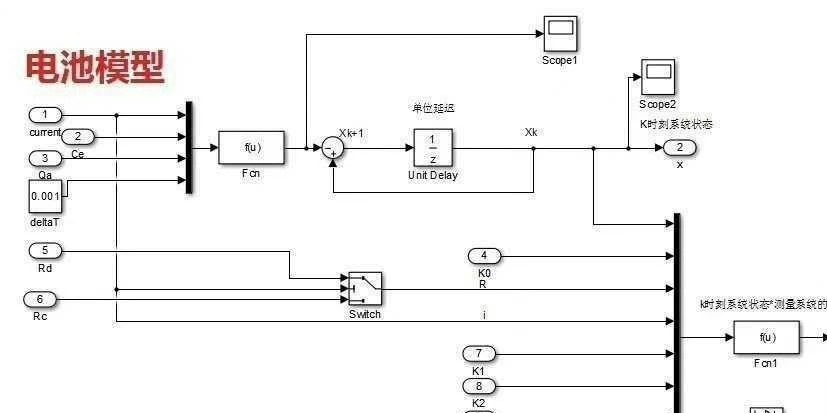
一、电池模型
在Simulink中构建电池模型,我们可以采用等效电路模型。例如常见的Rint模型,它由一个电压源$E$、一个内阻$R0$组成。这种简单的模型可以较好地描述电池的基本特性。在Simulink中,我们可以使用基本的电气元件模块搭建该模型。比如通过“Voltage Source”模块模拟电池电动势$E$,“Resistance”模块模拟内阻$R0$,然后连接起来构成电池的初步电路模型。
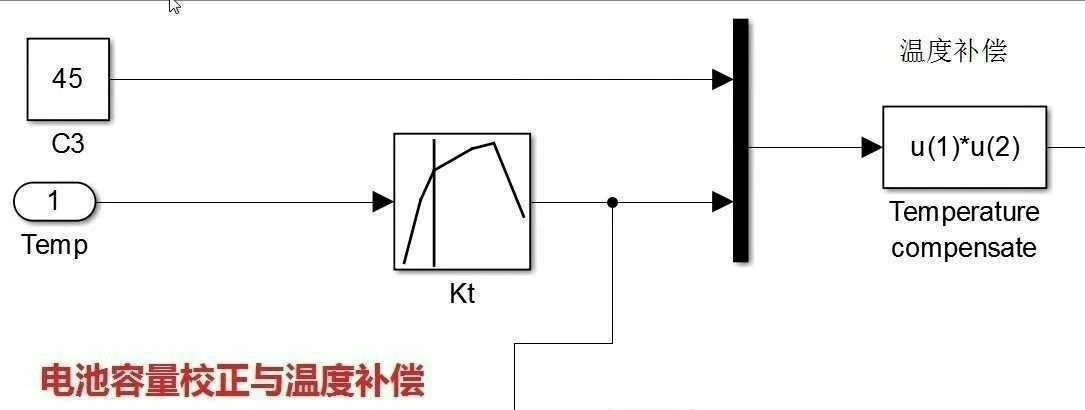
二、电池容量校正与温度补偿
电池的容量并非一成不变,它会受到温度等因素的影响。为了更准确地估计SOC,需要进行容量校正与温度补偿。
在代码实现上,我们可以定义函数来处理这部分逻辑。以下是一段简单的Matlab代码示例,用于根据温度调整电池容量:
function correctedCapacity = temperatureCompensation(capacity, temperature)
% 假设这里有一个简单的线性关系
if temperature > 25
correctionFactor = 1 + 0.01 * (temperature - 25);
else
correctionFactor = 1 - 0.01 * (25 - temperature);
end
correctedCapacity = capacity * correctionFactor;
end这段代码根据温度值调整电池容量,温度高于25℃时容量会有所增加,低于25℃时容量会相应减少,通过一个简单的线性关系模拟了温度对容量的影响。
三、电流效率
电流效率在电池充放电过程中也起着关键作用。实际中,电池充放电并非100%效率,存在一定的损失。在算法实现中,我们需要考虑这一因素。
EKF扩展卡尔曼滤波算法做电池SOC估计,在Simulink环境下对电池进行建模,包括: 1.电池模型 2.电池容量校正与温度补偿 3.电流效率 采用m脚本编写EKF扩展卡尔曼滤波算法,在Simulink模型运行时调用m脚本计算SOC,通过仿真结果可以看出,估算的精度很高,最大误差小于0.4%
假设充电效率为$\eta{charge}$,放电效率为$\eta{discharge}$,可以在计算SOC时加入这些效率因素。
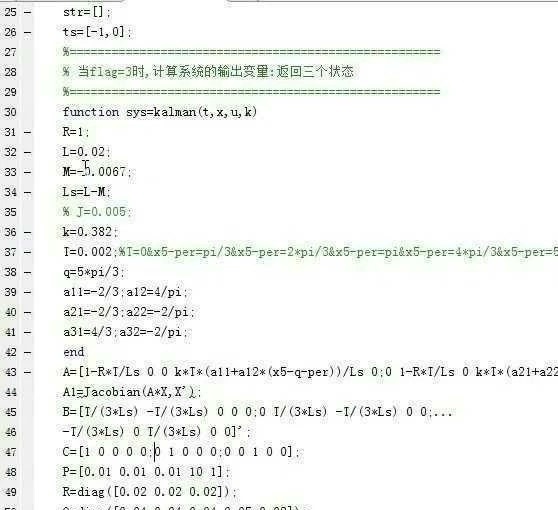
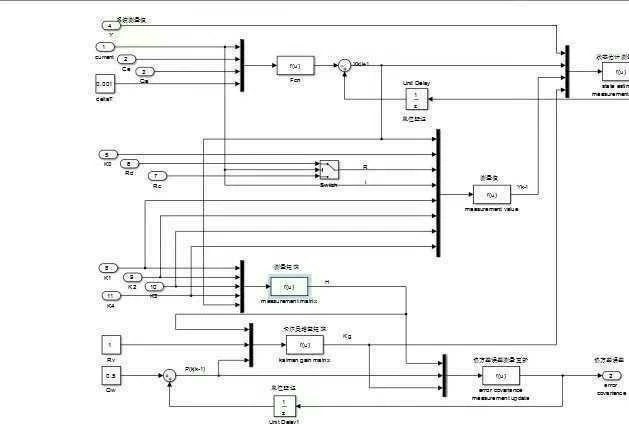
四、EKF扩展卡尔曼滤波算法实现
采用m脚本编写EKF算法,以下是EKF算法的核心代码片段及分析:
% EKF初始化
x_hat = [initialSOC; initialInternalState]; % 初始状态估计
P = eye(2); % 初始协方差矩阵
Q = [q1 0; 0 q2]; % 过程噪声协方差
R = r; % 测量噪声协方差
for k = 1:length(I)
% 时间更新
x_hat_minus = f(x_hat, I(k)); % f为状态转移函数
A = jacobianF(x_hat, I(k)); % A为状态转移函数的雅可比矩阵
P_minus = A * P * A' + Q;
% 测量更新
y = h(x_hat_minus); % h为测量函数
C = jacobianH(x_hat_minus); % C为测量函数的雅可比矩阵
K = P_minus * C' / (C * P_minus * C' + R); % 卡尔曼增益
x_hat = x_hat_minus + K * (SOC_measured(k) - y); % 更新状态估计
P = (eye(2) - K * C) * P_minus; % 更新协方差矩阵
end代码分析
- 初始化部分:设置了初始状态估计
x_hat,包括初始SOC和电池内部状态;初始协方差矩阵P;过程噪声协方差Q和测量噪声协方差R。这些初始值的设定对算法的收敛性和估计精度有重要影响。 - 时间更新:通过状态转移函数
f预测下一个时刻的状态xhatminus,并计算状态转移函数的雅可比矩阵A,用于更新协方差矩阵P_minus。这一步基于系统模型对状态进行预测。 - 测量更新:利用测量函数
h计算预测的测量值y,以及测量函数的雅可比矩阵C。通过卡尔曼增益K将预测值与实际测量值SOCmeasured(k)相结合,更新状态估计xhat和协方差矩阵P。这一步使得算法能够根据实际测量数据对预测结果进行修正。
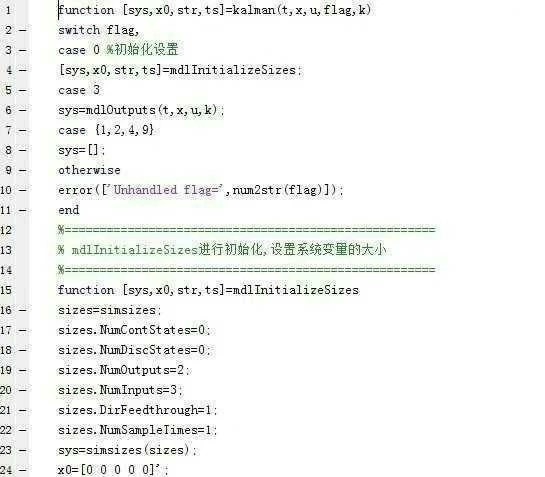
五、在Simulink模型中调用m脚本计算SOC
在Simulink模型中,我们可以使用“MATLAB Function”模块来调用编写好的EKF算法m脚本。将电池模型的输出(如电流、电压等)作为输入传递给“MATLAB Function”模块,在模块内部调用EKF算法计算SOC,并将结果输出。
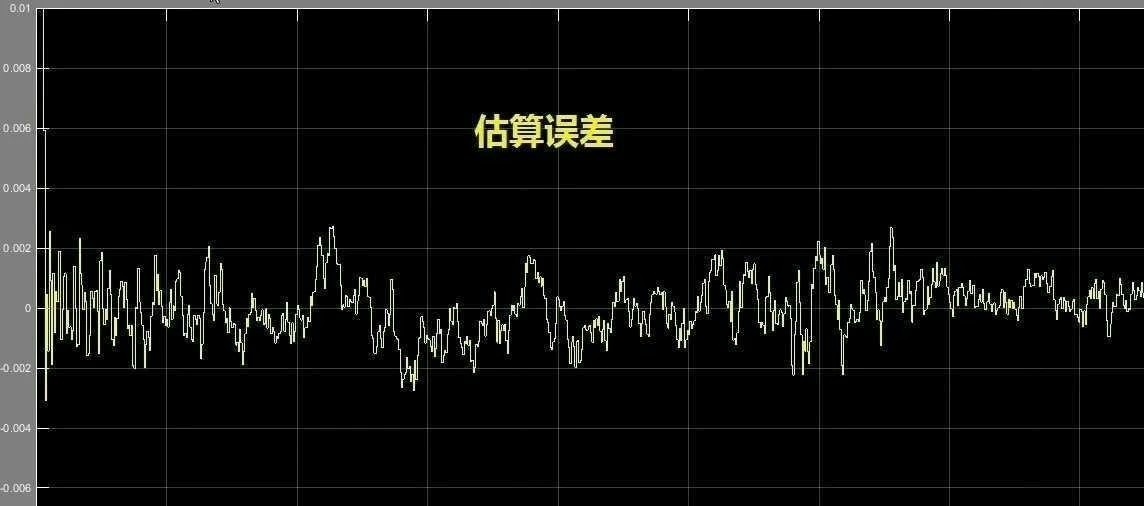
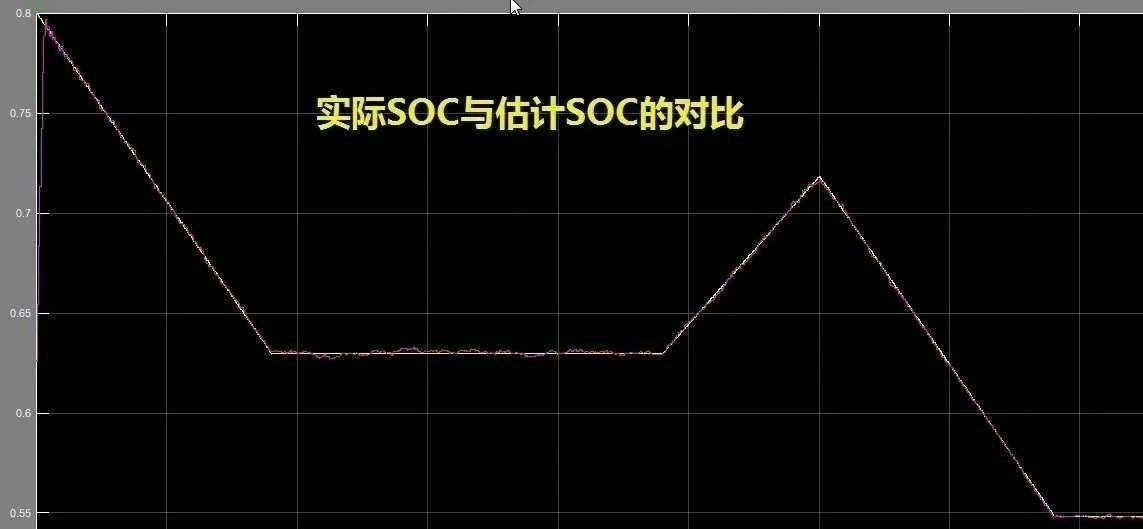
六、仿真结果
通过仿真,我们发现采用上述方法估算的SOC精度很高,最大误差小于0.4%。这表明基于EKF扩展卡尔曼滤波算法的电池SOC估计方法在Simulink环境下能够有效地对电池进行建模,并实现高精度的SOC估计,为电池管理系统的优化提供了有力支持。
综上所述,本文详细介绍了基于EKF扩展卡尔曼滤波算法在Simulink环境下进行电池建模及SOC估计的全过程,从电池模型搭建到算法实现,展示了一套完整的解决方案。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐


 0
0 0
0- 0



 已为社区贡献8条内容
已为社区贡献8条内容

所有评论(0)