步进电机的矢量控制:分类控制及预测控制器应用——从建模到FCS-MPC的动态响应与稳定性研究
步进电机的矢量控制:分类控制和预测控制器 采用传统PI控制、无差拍预测控制器和有限控制集模型预测控制(FCS-MPC)的两相永磁同步电机(又名步进电机)的矢量控制。 该项目分为不同的部分: -建模:ab参考系中的标准状态空间方程 -矢量控制:扇区变换和磁场定向控制(FOC) -电压基准生成:空间矢量调制和SPWM -PI控制:传统策略 -Deadbeat控制:最简单的“预测”控制 -模型预测控制:使用有限的控制动作集(FCS-MPC) 使用Matlab和Simulink进行建模和仿真 预测控制器能够在仿真中获得非常好的动态响应,比传统的PI控制要好得多。 然而,必须注意确保其稳定性,特别是无差拍控制,其性能在很大程度上取决于模型的准确性。 MPC是一个有趣的选择,但由于它的计算量非常大,因此无法实时运行。 最后,FCS-MPC在没有调制的情况下直接作用于电子开关(MOSFET、IGBT),从而大大减少了搜索空间。 这允许算法在更高的频率下运行。
两相永磁同步电机的矢量控制就像在玩一场精密的时间游戏——既要让磁场乖乖听话转向,又要让电流响应得像弹簧一样灵敏。咱们这次直接上硬核操作,拿Matlab/Simulink当试验场,看看传统PI、无差拍预测和FCS-MPC这三种控制器到底谁更会"驯服"步进电机。
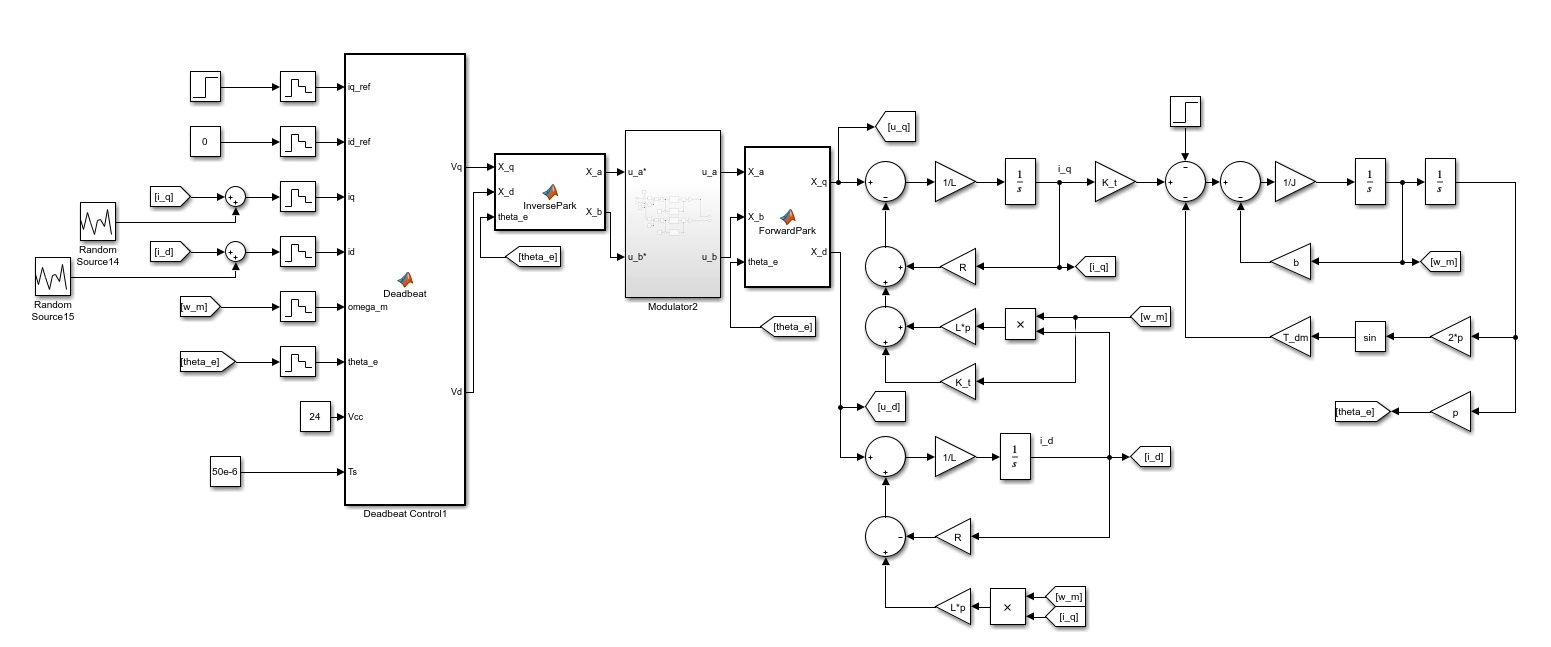
先看建模这个地基打得牢不牢。在ab坐标系下搞状态空间方程时,千万别被电感矩阵绕进去。下面这段代码把电机参数打包成结构体,看着像在超市买菜列清单:
motorParams.Lq = 0.025; // 交轴电感
motorParams.Ld = 0.023; // 直轴电感
motorParams.Rs = 2.5; // 定子电阻
motorParams.P = 4; // 极对数
motorParams.J = 0.001; // 转动惯量这些参数要是填错了,仿真结果绝对比过山车还刺激。记得每次改参数后都要重新线性化模型,就像炒菜中途调整火候得重新尝味道。
说到磁场定向控制,扇区判断是躲不开的套路活。下面这个判断逻辑简单粗暴却有效,活像交通警察指挥六路车流:
function sector = getSector(theta)
angle = mod(theta, 2*pi);
sector = floor(angle/(pi/3)) + 1; // 60度一个扇区
end但别以为分完扇区就完事了,实际调试时遇到过相电流波形像锯齿状的尴尬吗?那八成是扇区切换时的电压矢量没选对。
空间矢量调制(SVPWM)的实现最有意思,下面这段代码把矢量分解玩出了俄罗斯方块的感觉:
function [t1, t2, sector] = svpwm(v_alpha, v_beta, Ts)
Vdc = 24; // 直流母线电压
// 矢量分解...
sector = determineSector(v_alpha, v_beta);
// 作用时间计算...
t1 = sqrt(3)*Ts*(v_beta - v_alpha/sqrt(3))/(2*Vdc);
t2 = sqrt(3)*Ts*v_alpha/(Vdc*sqrt(3));
// 过调制处理...
end仿真时把示波器接在PWM输出端,能看到马鞍形调制波才算入门。但真到硬件实现时,死区时间补偿才是真正的魔鬼细节。
步进电机的矢量控制:分类控制和预测控制器 采用传统PI控制、无差拍预测控制器和有限控制集模型预测控制(FCS-MPC)的两相永磁同步电机(又名步进电机)的矢量控制。 该项目分为不同的部分: -建模:ab参考系中的标准状态空间方程 -矢量控制:扇区变换和磁场定向控制(FOC) -电压基准生成:空间矢量调制和SPWM -PI控制:传统策略 -Deadbeat控制:最简单的“预测”控制 -模型预测控制:使用有限的控制动作集(FCS-MPC) 使用Matlab和Simulink进行建模和仿真 预测控制器能够在仿真中获得非常好的动态响应,比传统的PI控制要好得多。 然而,必须注意确保其稳定性,特别是无差拍控制,其性能在很大程度上取决于模型的准确性。 MPC是一个有趣的选择,但由于它的计算量非常大,因此无法实时运行。 最后,FCS-MPC在没有调制的情况下直接作用于电子开关(MOSFET、IGBT),从而大大减少了搜索空间。 这允许算法在更高的频率下运行。
传统PI控制就像老司机开车——稳当但反应慢。调参时见过这种情况吗?比例增益刚加到0.5,电机就开始哼哧哼哧抖,活像得了帕金森:
[PI控制器模块]
Kp = 0.3; Ki = 5;
AntiWindup = 饱和限幅;这时候别急着骂PI不行,查查电流环带宽是不是没算对。有个邪门招数:把积分时间常数设为电感/电阻的比值,往往有意想不到的效果。
无差拍预测控制才叫刺激,完全是在玩时间魔术。核心就一句话:"下一拍电流必须给我到位!" 代码实现简单得不像预测控制:
function V_ref = deadbeatControl(i_ref, i_meas, L, R, Ts)
V_ref = (L/Ts)*(i_ref - i_meas) + R*i_meas;
end但模型参数偏差1%就能让波形亲妈都不认识。试过故意把电感参数设错10%吗?电流响应立马变成抽象派艺术画。
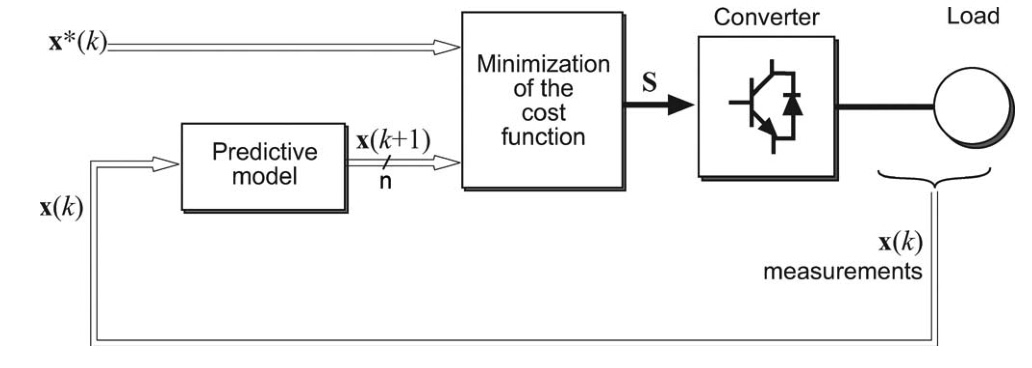
FCS-MPC才是真正的暴力美学,直接怼着开关状态穷举。下面这个预测循环像在翻电子开关的牌子:
for switchState = 1:8 // 两电平逆变器8种状态
predictCurrent = modelPredict(switchState);
cost(switchState) = abs(i_ref - predictCurrent)^2;
end
optimalState = find(cost == min(cost));实测时发现个诡异现象:明明算力足够,但开关频率一上20kHz就卡成PPT。后来发现是没做状态剪枝——相邻周期只允许改变一个桥臂的状态,这才把计算量压下来。
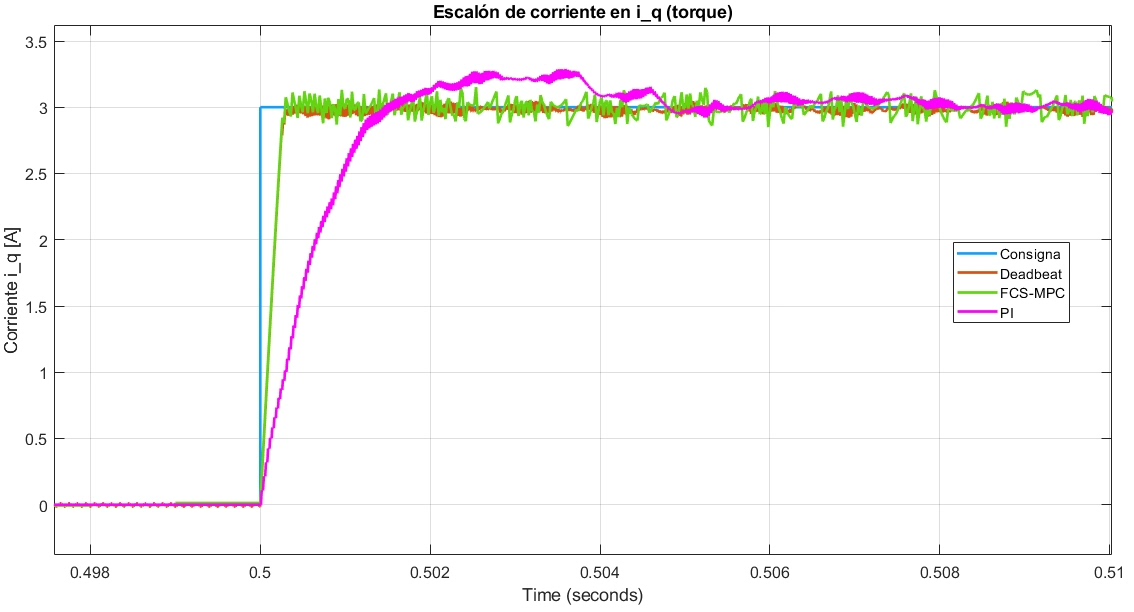
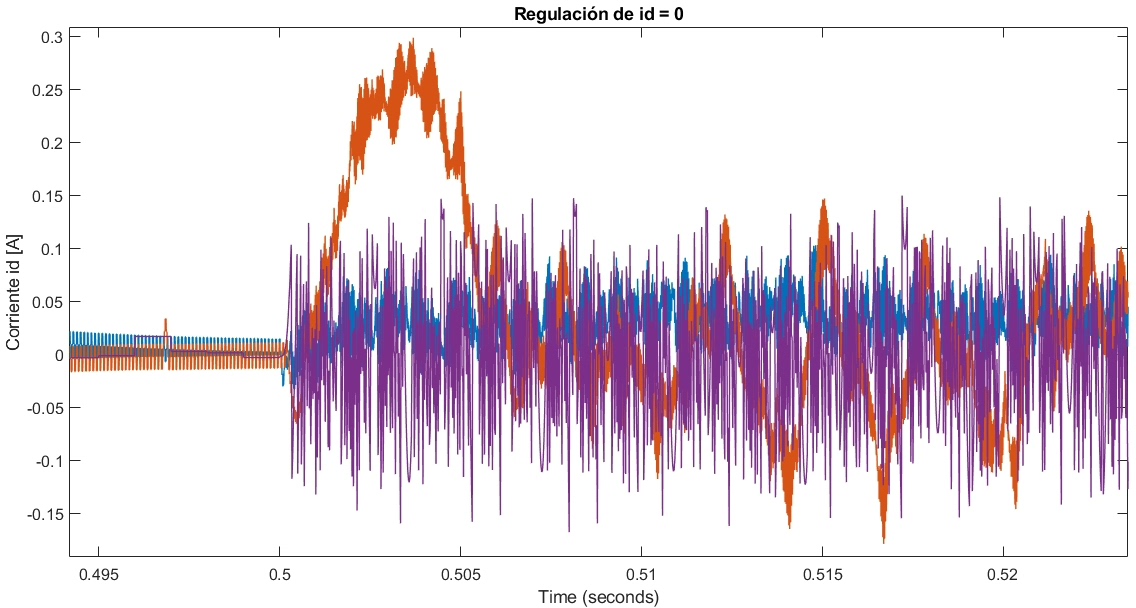
最后放个仿真对比彩蛋:突加载工况下,PI控制的转速跌落像跳水,恢复时间够泡碗面;无差拍控制倒是反应快,但参数失配时振荡得像蹦迪;FCS-MPC全程稳如老狗,就是CPU占用率飙到80%——果然天下没有免费的午餐。下次试试把预测时域扩展到三步,看看会不会把电脑主板烧出香味...

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐



 0
0 0
0- 0



 已为社区贡献13条内容
已为社区贡献13条内容

所有评论(0)