深入理解 IMU 标定要解决的“三座大山”
深入理解 IMU 标定要解决的“三座大山”
在研发无卫星环境(GPS-denied)下的组合导航与避障算法时,IMU(惯性测量单元)是我们最核心的依赖。最近在打通 ROS2 与底层飞控(Pixhawk 6C)的高频通信,并将纯净的 IMU 数据落盘提取到 MATLAB 后,看着那些原本以为是“绝对真理”的波形,我开始重新审视一个根本性问题:我们从传感器读到的原始数据,真的可信吗?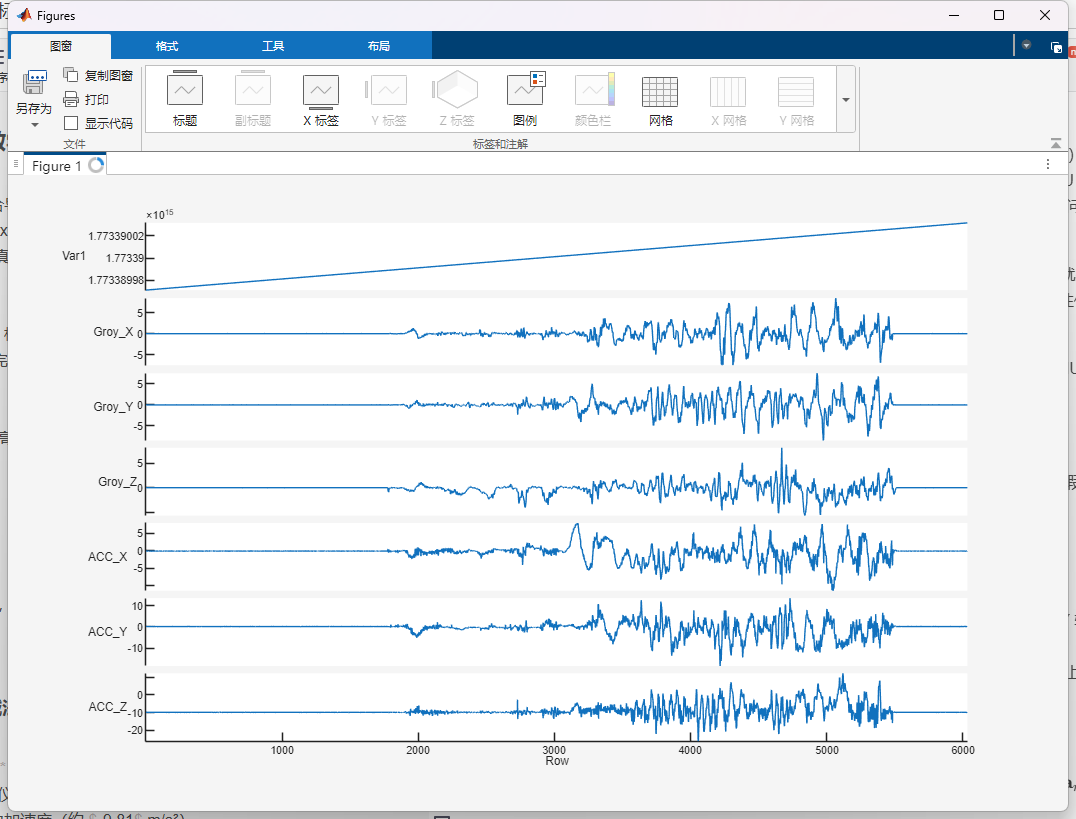
很多刚接触惯导的开发者以为,所谓的“IMU 标定”就是把飞控静置,算个平均值减掉就完事了。但实际上,“加减法”只解决了第一层误差。一个完整的工业级标定,其实是一套严密的线性代数矩阵运算。
今天,我们就来扒开现象看本质,详细聊聊高精度转台和标定算法到底在试图消灭 IMU 制造过程中的哪“三座大山”。
标定要解决的“三座大山”
MEMS(微机电系统)传感器在蚀刻加工时,受限于物理制造工艺,天生就带有各种瑕疵。我们将这些确定性误差分为三类:
1. 零偏误差 (Bias) —— 对应“加减法”
这是最直观、也是最容易被发现的误差。
理论上,当芯片处于绝对静止状态时,陀螺仪的三轴输出应该是 0,加速度计的 X、Y 轴输出应该是 0,Z 轴(假设朝上)应该感受到精确的重力加速度(约 −9.81-9.81−9.81 m/s²)。
但实际上,由于内部电路和机械应力,此时的输出往往是一个常数偏移量。比如,静止时 Z 轴加速度读数可能是 −9.70-9.70−9.70 m/s²。
- 物理意义:测量起点发生了平移。
- 数学处理:相减。假设原始读数为 araw\mathbf{a}_{raw}araw,零偏向量为 b\mathbf{b}b,补偿方式就是简单的 araw−b\mathbf{a}_{raw} - \mathbf{b}araw−b。
2. 刻度系数误差 (Scale Factor) —— 对应“乘法”
如果说零偏是“起点算错了”,那么刻度误差就是“尺子的刻度不准”。
传感器输出的“1 个单位”,未必完美等于现实世界的“1 个物理单位”。你可以把它想象成一把因为热胀冷缩而变长的卷尺。比如,你把飞控在桌面上极其精准地转动了 90 度,但把陀螺仪的数据积分下来,却发现结果是 88 度或者 92 度。
- 物理意义:输入与输出的比例关系不为 1。
- 数学处理:乘以一个比例系数矩阵。通常用一个对角矩阵 S\mathbf{S}S 来表示,矩阵的对角线元素代表了 X、Y、Z 三个轴各自的缩放比例。
3. 安装误差 / 正交误差 (Misalignment) —— 对应“矩阵乘法”
这是最隐蔽,也是对复杂空间运动影响最大的误差。
在理想的笛卡尔坐标系中,X、Y、Z 三个轴必须是绝对 90 度垂直的。但在芯片微观加工时,根本做不到完美的正交。这就会导致**“串扰效应”**(Cross-coupling)。
打个比方:当你开着小车只沿着正前方(X 轴)猛烈加速时,由于芯片内部的 Y 轴和 Z 轴并没有跟 X 轴完美垂直,它们也会分担到一部分这个方向的力,从而读出微小的假数据。
- 物理意义:各轴之间存在非正交的角度偏斜。
- 数学处理:乘以一个非对角线的补偿矩阵 M\mathbf{M}M。通过线性代数的投影变换,把歪斜的坐标轴强行“掰正”回互相垂直的理想状态。
终极形态:完整的标定数学模型
综合以上三点,真正在飞控芯片里,或者底层的驱动代码中,每次读取原始数据并转换为我们可用的物理量时,执行的完整数学处理公式是这样的:
IMUcalibrated=S⋅M⋅(IMUraw−b)\mathbf{IMU}_{calibrated} = \mathbf{S} \cdot \mathbf{M} \cdot (\mathbf{IMU}_{raw} - \mathbf{b})IMUcalibrated=S⋅M⋅(IMUraw−b)
其中,b\mathbf{b}b 消灭了零偏,S\mathbf{S}S 修正了刻度,M\mathbf{M}M 掰正了轴向。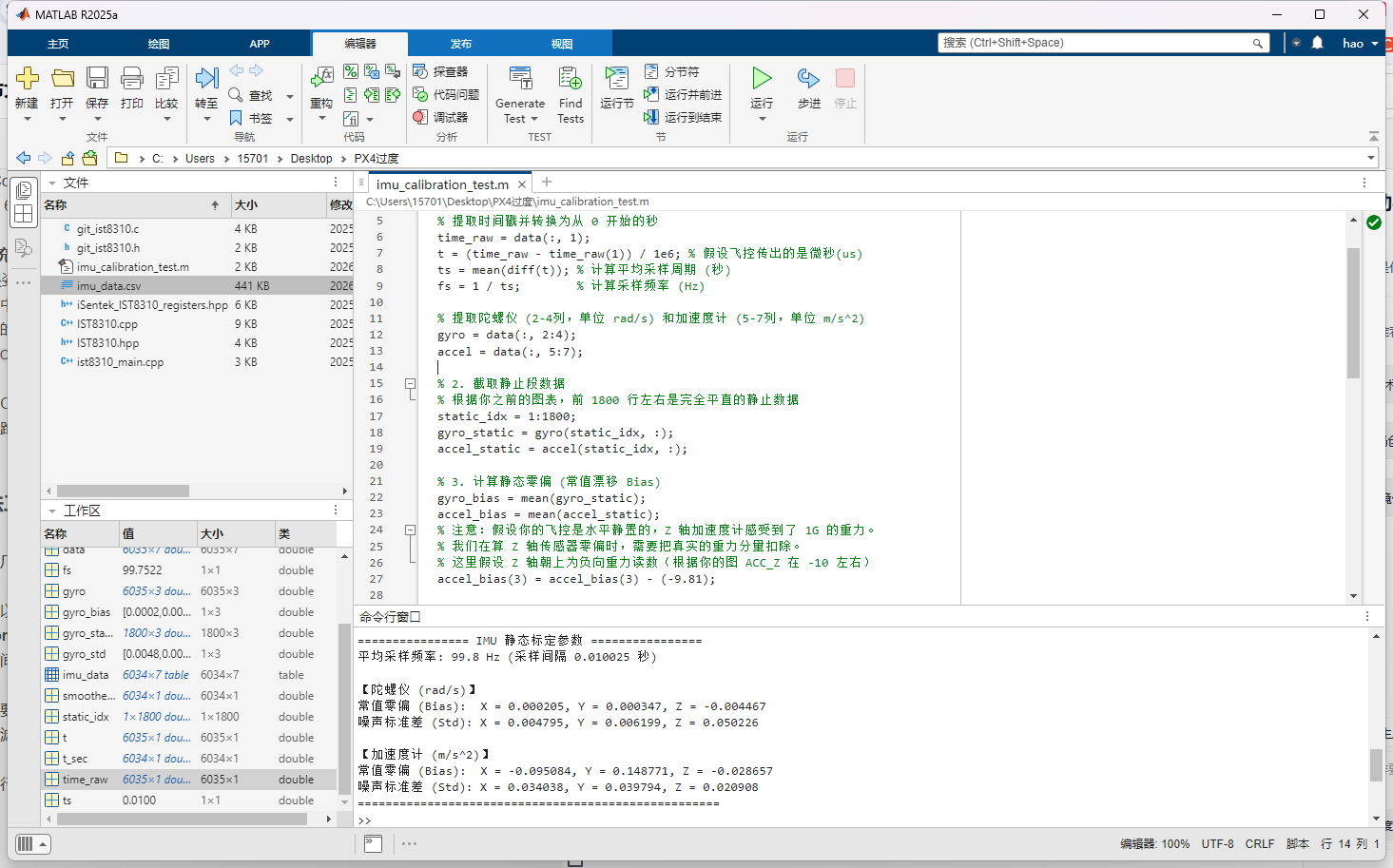
回归实战:QGroundControl 到底在干什么?
理解了这个公式,我们再回头看平常调试无人机时的日常操作。
当我们在 QGroundControl (QGC) 软件中点击“传感器校准”,然后按照提示把飞控像个正方体一样在桌面上翻转、静置在 6 个不同的面上时,这个过程本质上是在干什么?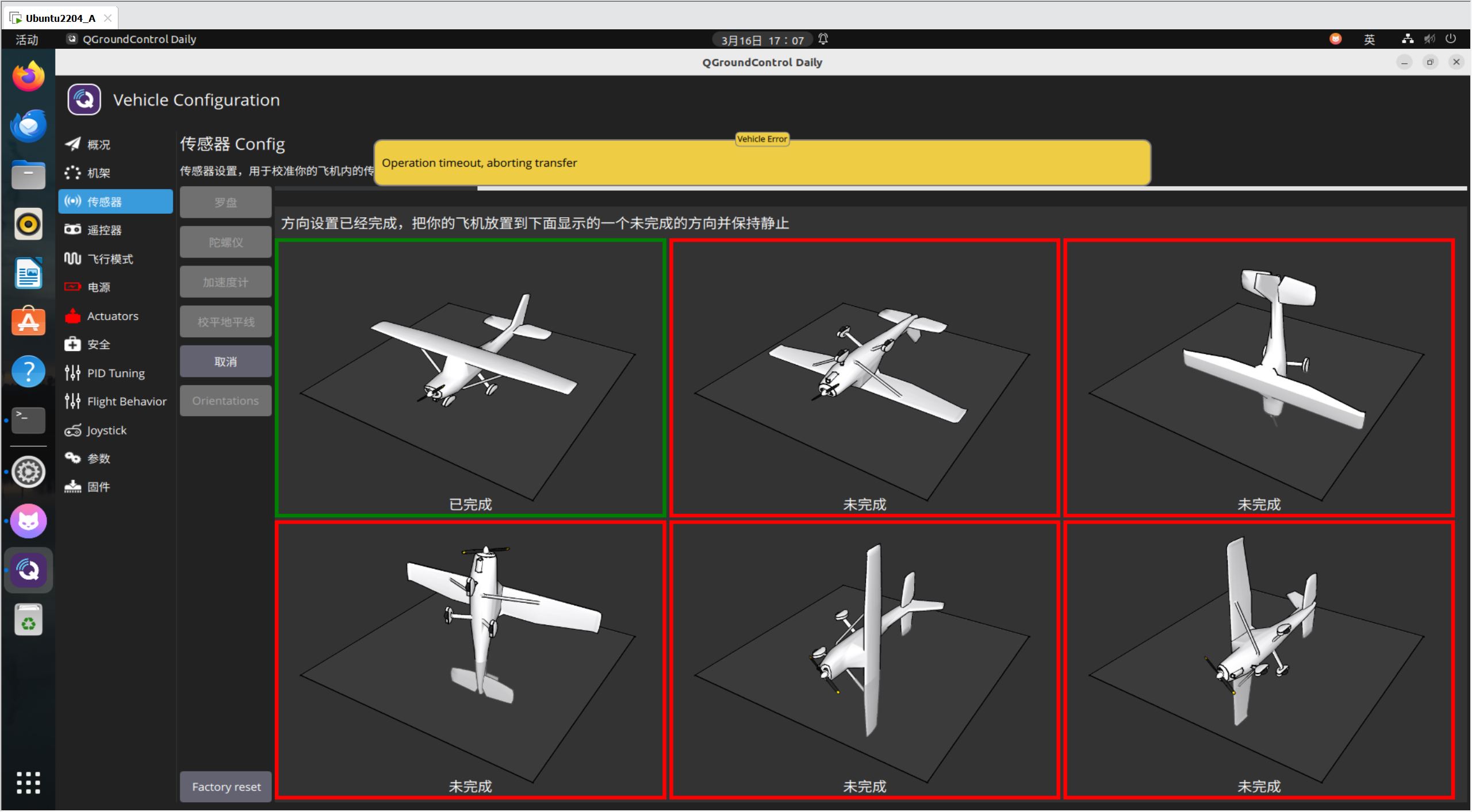
其实,我们就是在充当一个“简易且免费的三轴高精度转台”。
通过收集这 6 个极限姿态下已知的重力矢量投影,QGC 的后台算法利用最小二乘法等优化手段,逆向求解出了上述公式中的 b\mathbf{b}b、S\mathbf{S}S 和 M\mathbf{M}M 矩阵参数。然后,它将这些参数永久写死在飞控的 Flash 存储器里(也就是我们在 QGC 参数表里看到的 CAL_GYRO0_ID、CAL_ACC0_XOFF、CAL_ACC0_XSCALE 等晦涩的参数)。
因此,当我们通过 ROS2 和 Micro XRCE-DDS 从 /fmu/out/sensor_combined 话题拿到数据时,其实拿到的已经是飞控底层跑过这套公式、剔除过大部分确定性误差的优质数据了。
即使做过了完美的工厂级标定,故事也没有结束。
芯片在每次开机时,以及在不同运行温度下,依然会产生随机的动态零偏(Bias Instability)和高斯白噪声(Random Walk)。这些“不确定性误差”是无法用死公式消除的,只要一做积分(死推算),误差就会随时间疯狂发散。
这就是为什么我们需要把数据提取到 MATLAB 中进行 Allan 方差分析,测算出具体的噪声协方差矩阵,最后依靠卡尔曼滤波(如 ESKF)结合视觉里程计(VIO)来进行动态的估计与修正。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐



 9
9 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)