基于变预测时域MPC的自适应轨迹跟踪控制:突破轮胎刚度难题
基于变预测时域的MPC自适应轨迹跟踪控制,针对轮胎刚度时变的特点造成控制模型精度降低,基于最小递归二乘法(RLS)估算的轮胎侧偏刚度,提升了模型的控制精度和鲁棒性,通过carsim与simulink联合仿真结果发现,改进后的轨迹跟踪控制器既满足了车辆低速行驶下的轨 迹跟踪精度,也一定程度上克服了高速下车辆容易失去稳定性的问题。 有详细的论文分析说明和资料,以及本人的,仿真包运行。
在车辆控制领域,轨迹跟踪控制一直是个重要且充满挑战的课题。今天就来聊聊基于变预测时域的MPC自适应轨迹跟踪控制,它可是在应对轮胎刚度时变问题上有着独特的妙招。
轮胎刚度时变带来的困扰
在车辆行驶过程中,轮胎刚度并不是一成不变的。这个时变的特点会造成控制模型精度降低,就好比我们原本有一张精准的地图(控制模型),但因为一些因素(轮胎刚度变化),这张地图变得不那么准确了,我们按照它来行驶就可能会跑偏。传统的控制方法在面对这种情况时往往显得力不从心,导致车辆轨迹跟踪精度下降,特别是在高速行驶时,车辆还容易失去稳定性。
最小递归二乘法(RLS)闪亮登场
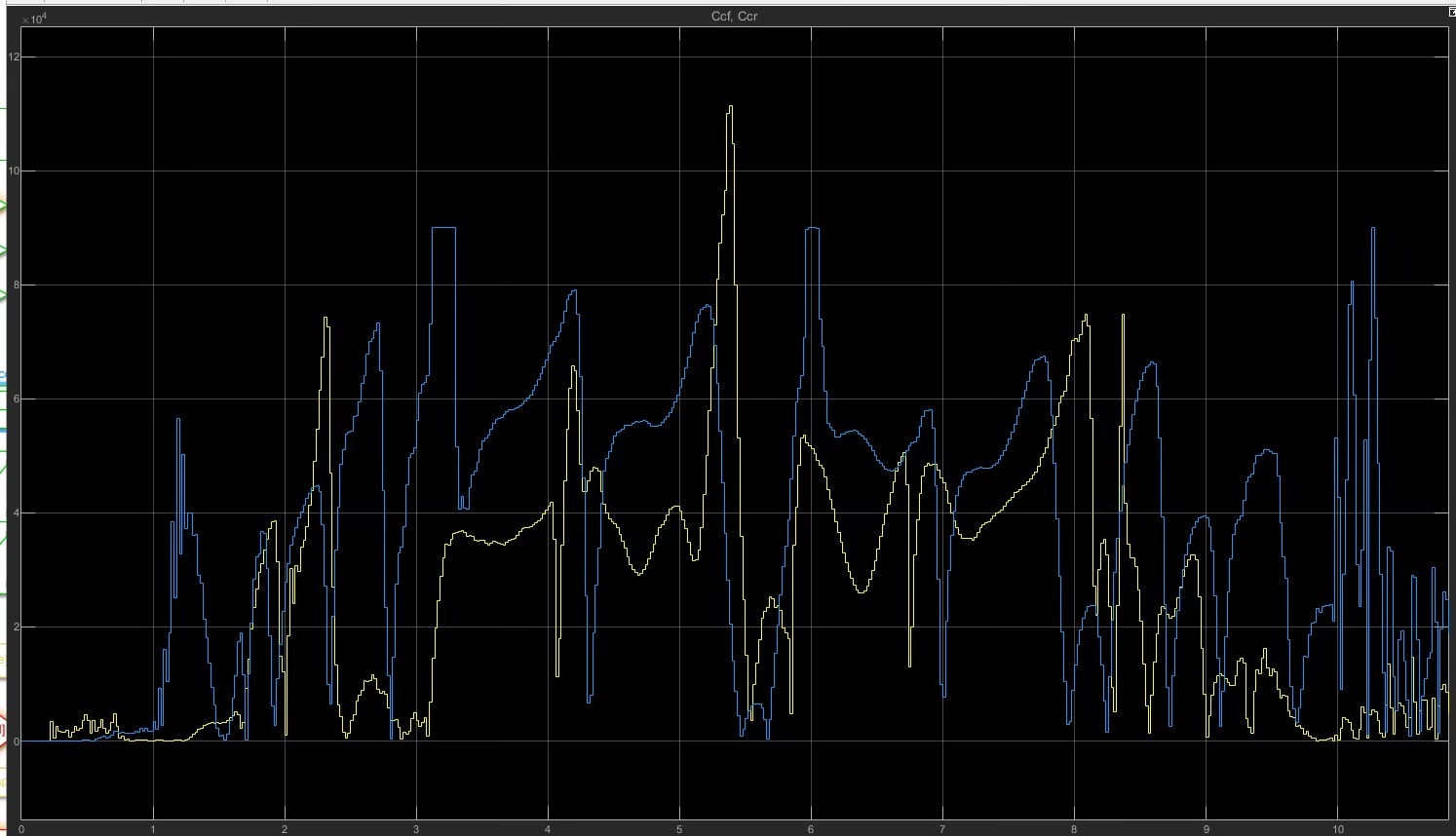
为了解决上述问题,我们引入了最小递归二乘法(RLS)来估算轮胎侧偏刚度。RLS算法在估算参数方面有着独特的优势,下面是一段简单的Python代码示例来模拟RLS算法的基本原理:
import numpy as np
# 初始化参数
n = 2 # 系统阶数
P = 1000 * np.eye(n) # 初始协方差矩阵
theta = np.zeros((n, 1)) # 初始参数估计值
lambda_ = 0.98 # 遗忘因子
# 模拟输入输出数据
u = np.random.randn(100, 1) # 输入数据
y = np.random.randn(100, 1) # 输出数据
# RLS算法迭代
for i in range(len(u)):
phi = np.array([[u[i][0], y[i - 1][0]]]).T if i > 0 else np.array([[u[i][0], 0]]).T
K = P @ phi / (lambda_ + phi.T @ P @ phi)
theta = theta + K * (y[i] - phi.T @ theta)
P = (1 / lambda_) * (np.eye(n) - K @ phi.T) @ P
print("最终参数估计值:", theta)代码分析
这段代码模拟了RLS算法的迭代过程。首先,我们初始化了一些必要的参数,包括系统阶数、协方差矩阵、初始参数估计值和遗忘因子。然后,我们生成了模拟的输入输出数据。在迭代过程中,我们根据当前的输入输出数据计算了增益矩阵K,并更新了参数估计值theta和协方差矩阵P。通过不断迭代,我们可以得到较为准确的参数估计值。
在实际应用中,我们使用RLS算法来估算轮胎侧偏刚度,通过不断更新刚度估计值,我们可以让控制模型更好地适应轮胎刚度的变化,从而提升模型的控制精度和鲁棒性。
变预测时域的MPC自适应轨迹跟踪控制
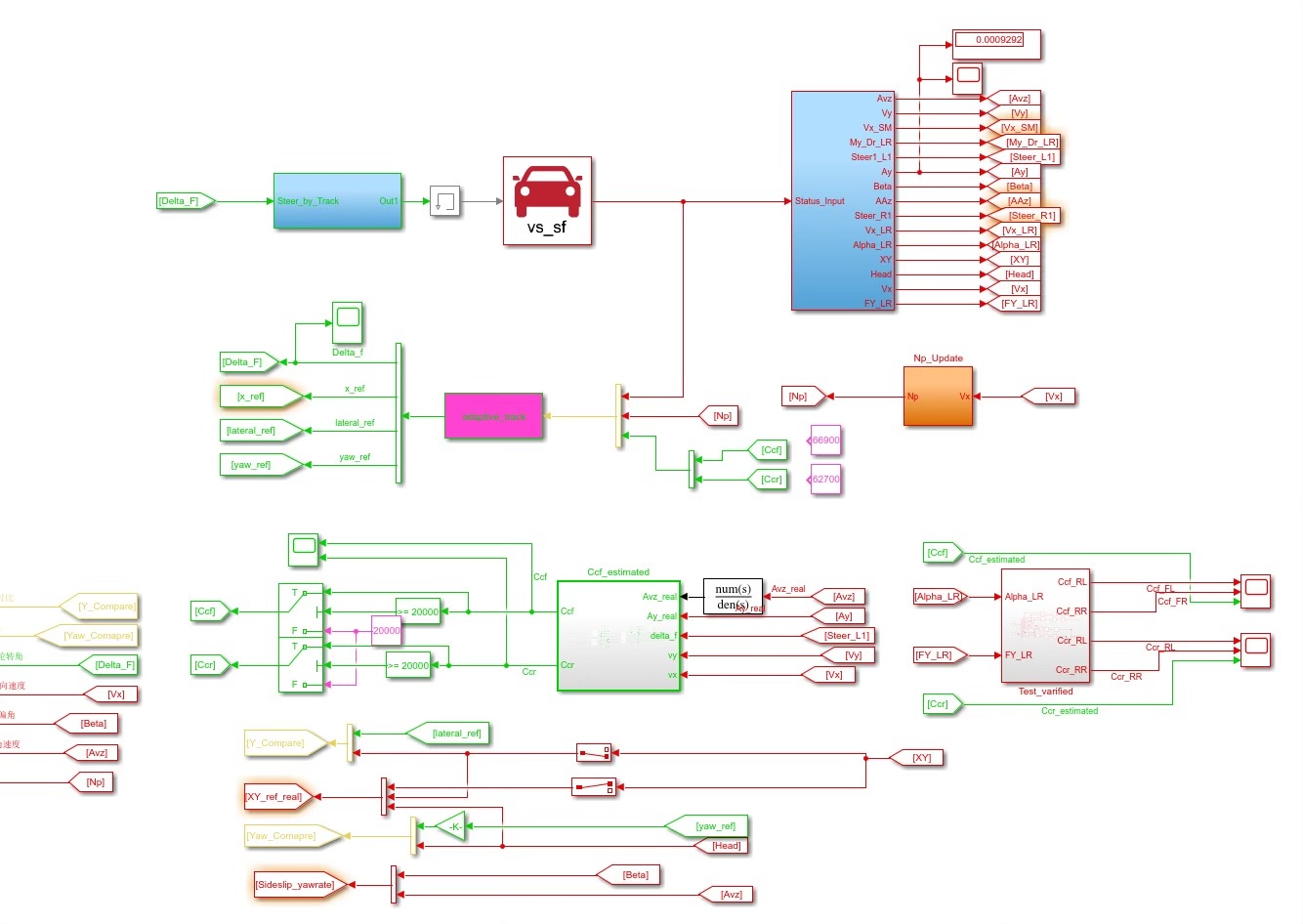
有了准确的轮胎侧偏刚度估计值,我们再结合变预测时域的MPC(模型预测控制)方法进行轨迹跟踪控制。MPC方法可以根据当前的系统状态和未来的参考轨迹,预测系统的未来行为,并通过优化控制输入来使系统尽可能地跟踪参考轨迹。变预测时域的MPC则可以根据车辆的行驶状态动态调整预测时域的长度,以更好地适应不同的行驶工况。
Carsim与Simulink联合仿真验证
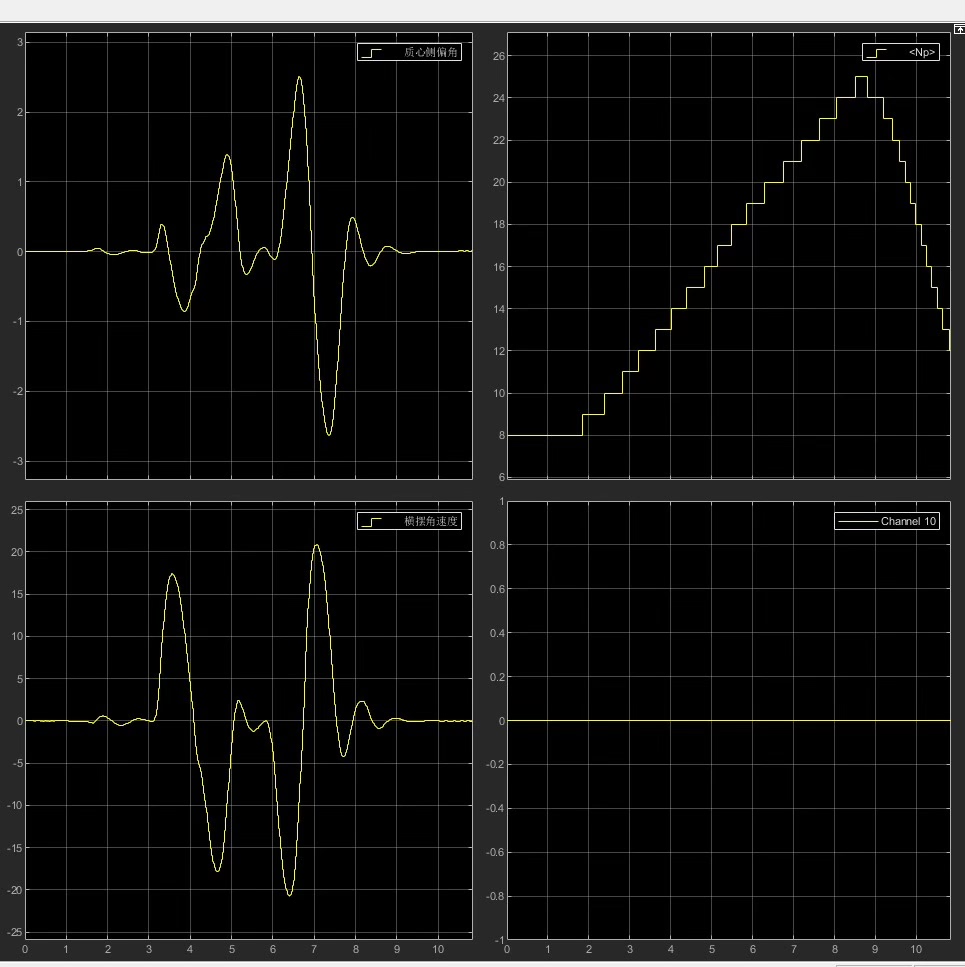
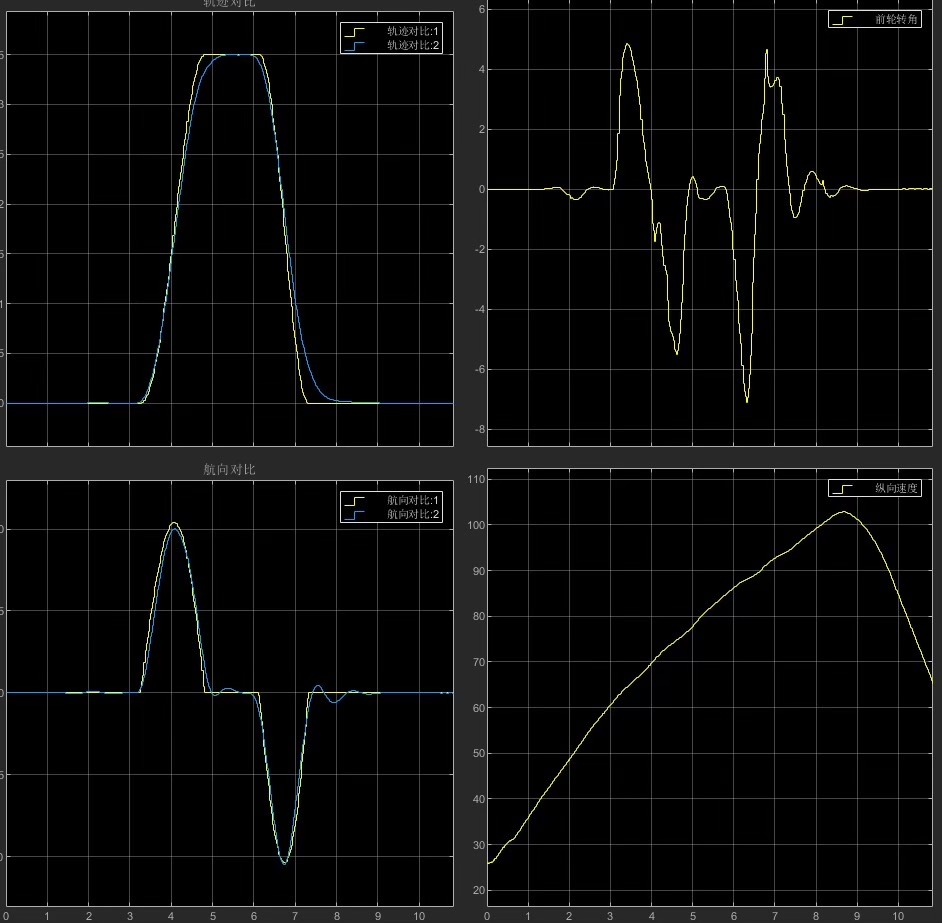
为了验证改进后的轨迹跟踪控制器的性能,我们使用了Carsim与Simulink进行联合仿真。Carsim是一款专业的车辆动力学仿真软件,它可以提供真实的车辆动力学模型;Simulink则是一个强大的控制系统设计和仿真工具,我们可以在其中实现MPC控制器。通过两者的联合仿真,我们可以更准确地模拟车辆的实际行驶情况。
基于变预测时域的MPC自适应轨迹跟踪控制,针对轮胎刚度时变的特点造成控制模型精度降低,基于最小递归二乘法(RLS)估算的轮胎侧偏刚度,提升了模型的控制精度和鲁棒性,通过carsim与simulink联合仿真结果发现,改进后的轨迹跟踪控制器既满足了车辆低速行驶下的轨 迹跟踪精度,也一定程度上克服了高速下车辆容易失去稳定性的问题。 有详细的论文分析说明和资料,以及本人的,仿真包运行。
仿真结果发现,改进后的轨迹跟踪控制器既满足了车辆低速行驶下的轨迹跟踪精度,也一定程度上克服了高速下车辆容易失去稳定性的问题。这就好比我们给车辆装上了一双“智能眼睛”和“灵活大脑”,让它在不同的行驶速度下都能稳稳地沿着预定轨迹行驶。
我这里有详细的论文分析说明和资料,以及本人的仿真包运行代码。如果你对这个领域感兴趣,欢迎交流探讨,一起在车辆控制的道路上探索前行!

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐

 7
7 0
0- 0



 已为社区贡献16条内容
已为社区贡献16条内容

所有评论(0)