三相PWM整流器闭环仿真:从理论到实践
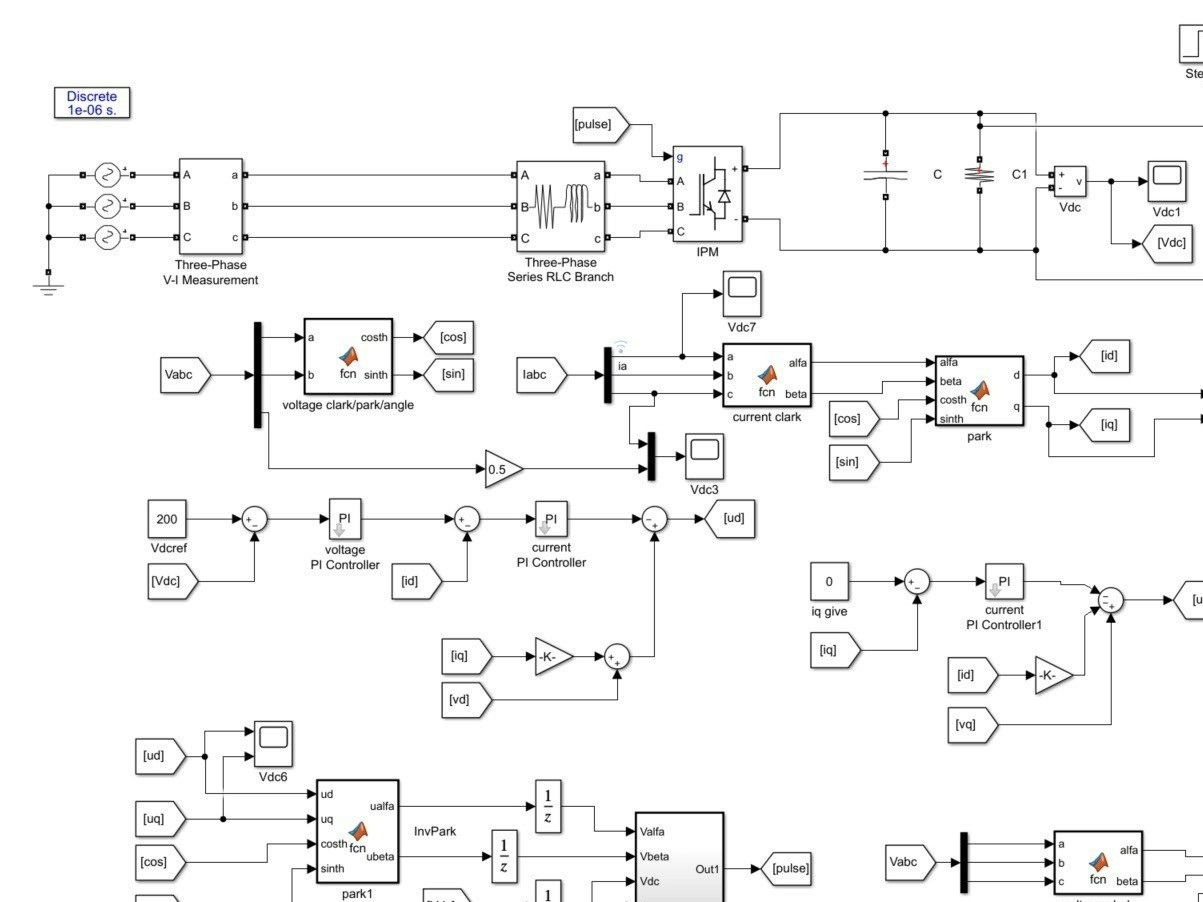
三相PWM整流器闭环仿真,电压电流双闭环控制,输出直流电压做外环 模型中包含主电路,坐标变换,电压电流双环PI控制器,SVPWM控制,PWM发生器 matlab/simulink模型 功率因数1,低THD仅1.2% 模型输出电压750VDC 升压拓扑输出电压600~1000可调 输出功率调节输出电阻阻值计算功率 三相六开关七段式SVPWM仿真,交-直-交变压变频器中的逆变器一般接成三相桥式电路,以便输出三相交流变频源,SVPWM控制是根据电机负载需要尽量圆形旋转磁场来控制电机旋转的要求通过合成电压空间矢量得到IGBT触发信号,它的直流电压的利用率比SPWM方式高15% 模型中带有简单解释可对应论文查阅资料更容易理解
最近一直在折腾三相PWM整流器的闭环仿真,今天来和大家分享一下我的成果和过程😃。
模型概述
这个模型可不简单,它包含了好多关键部分呢🧐。主电路是基础,就像大楼的地基一样。坐标变换能把三相电转换到我们熟悉的坐标系里,方便后续分析。电压电流双环PI控制器就像是模型的大脑,精准地控制着整个系统。还有SVPWM控制,它可是提高直流电压利用率的关键,比传统的SPWM方式高15%呢!另外还有PWM发生器,负责产生脉冲信号。
关键代码与分析
主电路部分
% 主电路参数设置
L = 0.005; % 电感值
C = 0.0001; % 电容值
R = 1; % 电阻值
% 这里简单示意主电路连接方式,实际模型更复杂
% 例如三相电源连接电感,电感连接电容和负载电阻等主电路参数的设置对整个整流器的性能起着至关重要的作用。像电感值、电容值和电阻值,它们之间的相互配合决定了电流、电压的变化情况。就好比不同的齿轮组合,能让整个机械系统运转得更顺畅或更吃力😜。
坐标变换代码
% 坐标变换模块
function [alpha, beta] = abc_to_alpha_beta(a, b, c)
alpha = (2/3)*(a - 0.5*b - 0.5*c);
beta = (sqrt(3)/3)*(b - c);
end这段代码实现了从三相坐标系到α-β坐标系的变换。为什么要做这个变换呢?因为在α-β坐标系下,我们分析电压、电流等信号会更方便,能更直观地看出它们之间的关系,就像把一个复杂的拼图拆分成了更容易理解的小块🧩。
电压电流双环PI控制器代码
% 电压环PI控制器
kp_v = 10;
ki_v = 5;
v_ref = 750; % 输出直流电压参考值
function v_out = voltage_pi_controller(v_err, v_int)
v_p = kp_v * v_err;
v_i = ki_v * v_int;
v_out = v_p + v_i;
v_int = v_int + v_err;
return;
end
% 电流环PI控制器
kp_i = 5;
ki_i = 3;
function i_out = current_pi_controller(i_err, i_int)
i_p = kp_i * i_err;
i_i = ki_i * i_int;
i_out = i_p + i_i;
i_int = i_int + i_err;
return;
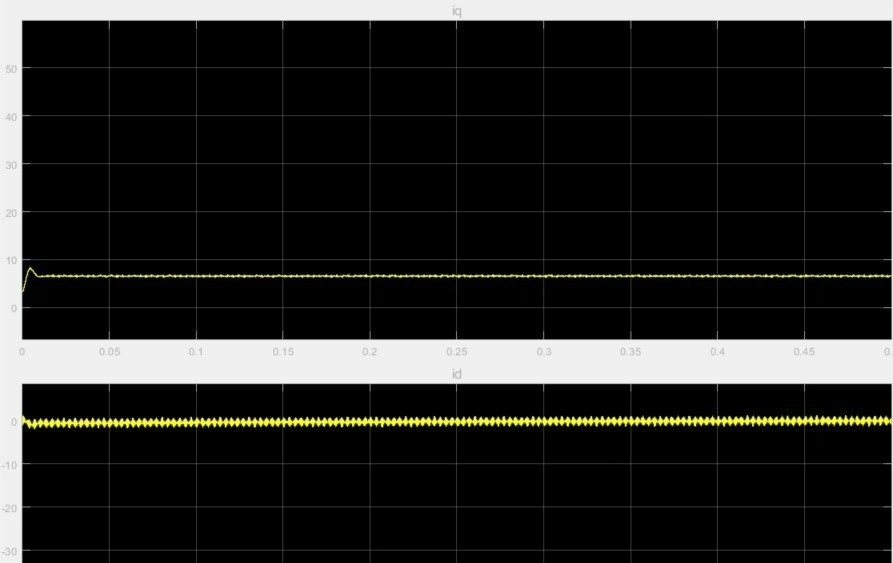
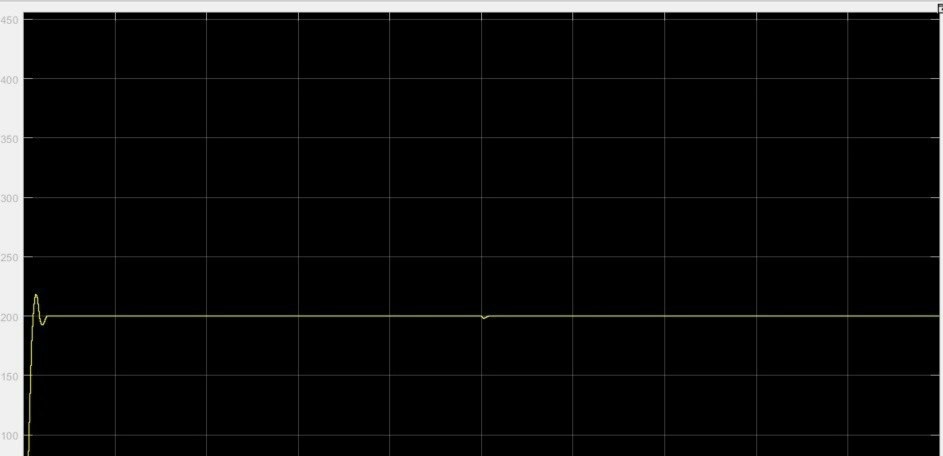
end电压电流双环PI控制器是这个模型的核心控制部分。电压环PI控制器根据输出直流电压与参考值的误差,不断调整控制信号,让输出电压稳定在750VDC。电流环PI控制器则根据电流误差来控制电流,保证整个系统的稳定运行。这就像是两个人配合跳舞,一个控制步伐大小(电压环),一个控制步伐速度(电流环),配合得好才能跳出优美的舞蹈💃。
SVPWM控制代码
% SVPWM控制部分
function [sector, t1, t2, t0] = svpwm(v_alpha, v_beta)
% 计算扇区
if v_beta >= 0
if v_alpha >= -v_beta
sector = 1;
else
sector = 2;
end
else
if v_alpha >= -v_beta
sector = 6;
else
sector = 5;
end
end
% 省略部分复杂计算代码,这里主要展示原理
% 根据扇区和电压矢量计算t1, t2, t0
% t1, t2, t0用于控制IGBT触发信号
endSVPWM控制是根据电机负载需要尽量产生圆形旋转磁场来控制电机旋转的要求通过合成电压空间矢量得到IGBT触发信号。这段代码通过计算电压矢量所在的扇区,然后根据扇区来确定IGBT的触发时间,从而实现更高效的控制。就好比给电机规划了一条更聪明的运动路线,让它跑得又快又稳🚀。
模型性能亮点
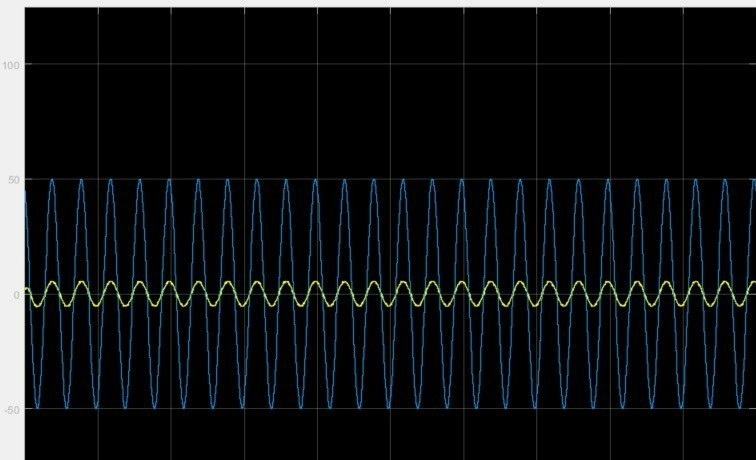
这个模型的性能真的很出色👏!功率因数能达到1,这意味着电能得到了充分利用,没有浪费。低THD仅1.2%,输出的电压波形非常纯净。而且输出电压750VDC稳定可靠,升压拓扑输出电压还能在600~1000之间可调,输出功率也能通过调节输出电阻阻值来计算功率。这些特性让它在实际应用中具有很大的优势,无论是工业生产还是其他领域,都能发挥很好的作用👍。
总结
通过这次三相PWM整流器闭环仿真,我对电力电子系统有了更深入的理解。从模型搭建到代码编写,再到性能优化,每一步都充满了挑战和乐趣😃。希望我的分享能让大家对三相PWM整流器有更直观的认识,也欢迎大家一起交流探讨呀🤗!
大家如果对这个模型感兴趣,或者在实际应用中遇到类似的问题,都可以随时问我哦😜。
三相PWM整流器闭环仿真,电压电流双闭环控制,输出直流电压做外环 模型中包含主电路,坐标变换,电压电流双环PI控制器,SVPWM控制,PWM发生器 matlab/simulink模型 功率因数1,低THD仅1.2% 模型输出电压750VDC 升压拓扑输出电压600~1000可调 输出功率调节输出电阻阻值计算功率 三相六开关七段式SVPWM仿真,交-直-交变压变频器中的逆变器一般接成三相桥式电路,以便输出三相交流变频源,SVPWM控制是根据电机负载需要尽量圆形旋转磁场来控制电机旋转的要求通过合成电压空间矢量得到IGBT触发信号,它的直流电压的利用率比SPWM方式高15% 模型中带有简单解释可对应论文查阅资料更容易理解
以上就是我的三相PWM整流器闭环仿真的博文啦,是不是还挺有意思的😄?
以上代码仅为示意,实际模型代码更为复杂和完整,大家可根据上述思路进一步深入研究🧐。
#三相PWM整流器 #闭环仿真 #电力电子 #MatlabSimulink

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐


 10
10 0
0- 0



 已为社区贡献28条内容
已为社区贡献28条内容

所有评论(0)