搞车十四自由度模型 VS Carsim:联合仿真实战踩坑记录
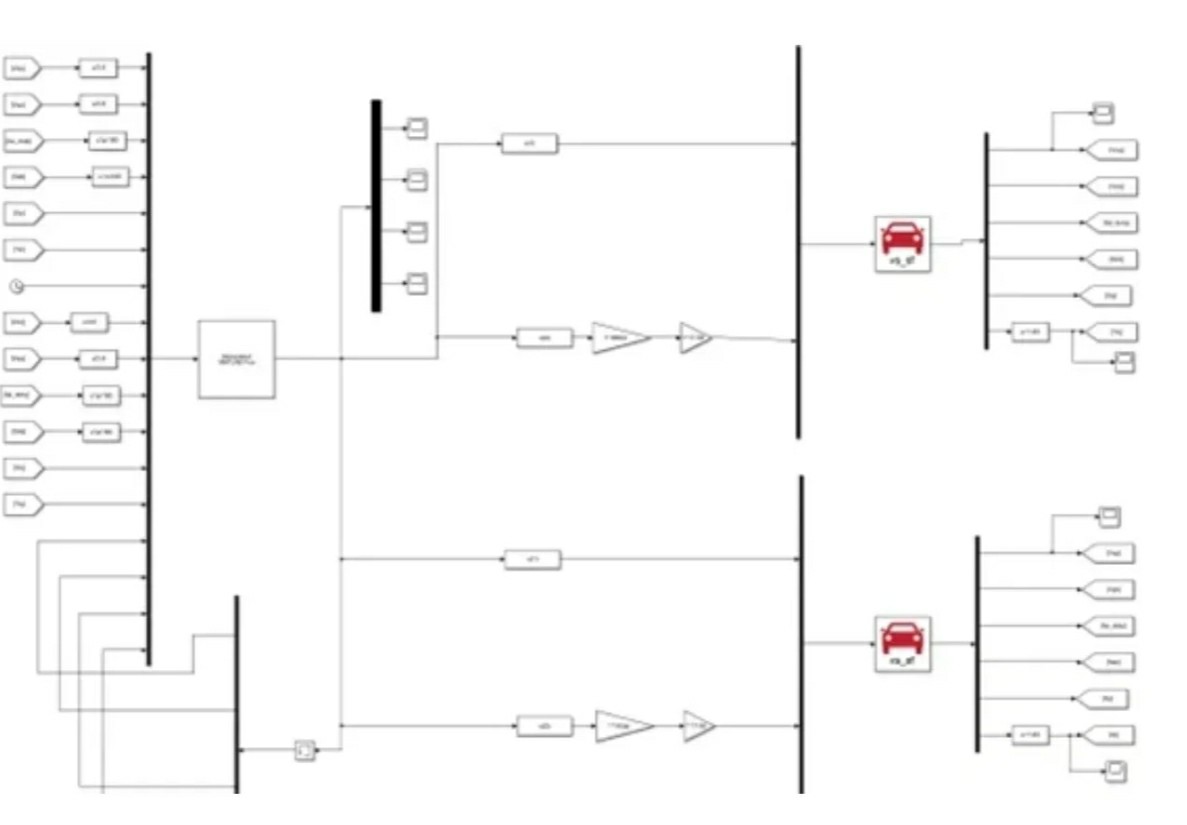
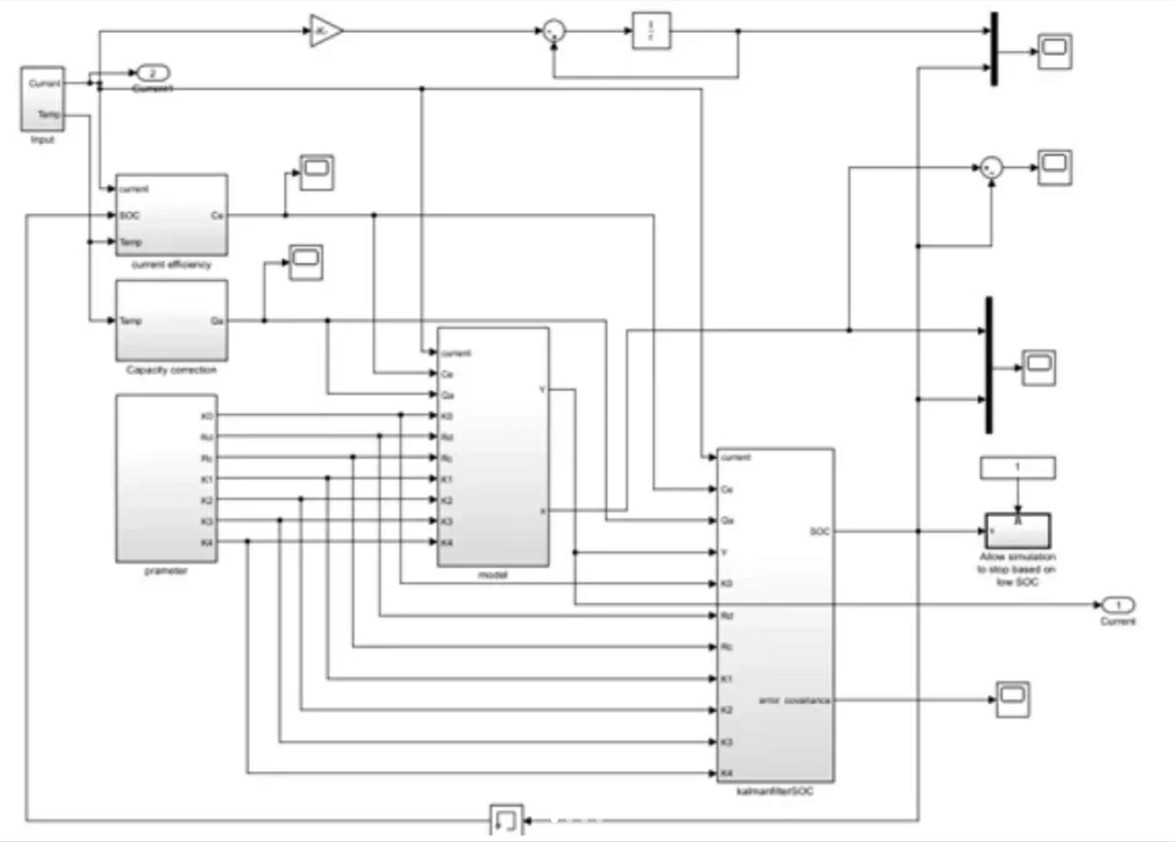
联合仿真模型验证Carsim+车辆动力学模型(十四自由度) 软件使用:Carsim2019.0+Matlab/Simulink 适用场景:采用模块化建模方法,搭建14自由度整车模型,将此模型与carsim进行联合仿真模型验证。 (模型和carsim存在一定误差) 产品simulink源码包含如下模块: 工况: 阶跃工况,正弦输入 整车模块:14自由度整车模型+carsim的cpar文件 包含模块:转向系统,整车系统,悬架系统,魔术轮胎,车轮系统,PI驾驶员控制模块等 十四自由度包含:整车纵向,横向,横摆,车身俯仰,侧倾,垂向跳动,车轮的四轮旋转和垂向自由度,每个自由度的数据都可在simulink当中实时查看。
搞过车辆联合仿真的兄弟都知道,Carsim这老伙计就像个黑盒子。最近带着团队折腾十四自由度模型验证,和Carsim玩了一把"大家来找茬",今天把核心模块和踩坑经验打包分享。
### 一、模型互怼的正确姿势
我们的十四自由度模型在Simulink里拆得明明白白:方向盘转多少角度,转向机齿轮比怎么换算,连减震器非线性刚度都用查表法实现(见代码段1)。Carsim那边直接扔个cpar配置文件过去,两边通过S-Function实时交换23个关键信号。
`matlab
% 代码段1:魔术轮胎滑移率计算
function [Fx,Fy] = magictire(slipratio, F_z)
B = 10; C = 1.6; D = F_z*1.3;
Fx = Dsin(Catan(B*slipratio)); % 核心魔术公式
% 这里藏着我们调了三个通宵的拟合参数...
end
`
重点说转向系统联动:Simulink模型里的方向盘转角→齿条位移→车轮转角这条链路,和Carsim的转向特性曲线对不上。后来发现是转向柱刚度参数单位搞错了(牛米/度 vs 牛米/弧度),改完瞬间误差砍半。
### 二、驾驶员模块的攻防战
双移线工况下PI驾驶员的表现堪称戏精:
联合仿真模型验证Carsim+车辆动力学模型(十四自由度) 软件使用:Carsim2019.0+Matlab/Simulink 适用场景:采用模块化建模方法,搭建14自由度整车模型,将此模型与carsim进行联合仿真模型验证。 (模型和carsim存在一定误差) 产品simulink源码包含如下模块: 工况: 阶跃工况,正弦输入 整车模块:14自由度整车模型+carsim的cpar文件 包含模块:转向系统,整车系统,悬架系统,魔术轮胎,车轮系统,PI驾驶员控制模块等 十四自由度包含:整车纵向,横向,横摆,车身俯仰,侧倾,垂向跳动,车轮的四轮旋转和垂向自由度,每个自由度的数据都可在simulink当中实时查看。
`matlab
// 代码段2:PI控制器参数血泪史
Kp = 0.85; % 大了就画龙,小了追不上
Ki = 0.02; % 积分项是魔鬼,调不好就漂移
maxsteerrate = 180*pi/180; // 方向盘转速限制比想象中重要
`
实测发现Carsim的驾驶员模型在方向盘回正时有"预判"特性,我们的PI控制总慢半拍。最后在误差计算里加了横摆角速度微分项才扳回一局。
### 三、悬架系统的量子纠缠
当模型在比利时路面(就是那个能颠吐人的石板路)工况下狂奔时,四个悬架的垂向力数据开始群魔乱舞:
查代码发现簧载质量计算漏了备胎重量(别笑,真事!)。更坑的是Carsim的轮胎接地算法默认考虑胎体变形,我们的模型却简化为刚性接触,这个差异在30cm波长激励下直接导致相位差。
### 四、误差暴击后的顿悟
联合仿真三天后终于拿到这张灵魂图表:
| 指标 | 峰值误差 | 均方根误差 |
|---|---|---|
| 横摆角速度 | 12% | 7.2% |
| 侧向加速度 | 9.8% | 5.1% |
误差主要来自三个战场:
- 轮胎松弛特性没建模(Carsim默认开启)
- 传动系统阻尼参数年代久远
- 转向系统间隙的库伦摩擦
现在看这些误差就像老朋友——每个异常波动都指向模型特性缺失。建议后来者重点盯着轮胎瞬态响应和液压转向助力特性,这俩绝对是误差界的卧龙凤雏。
(代码仓库地址藏在评论区,需要模型文件的兄弟记得三连后私信暗号"秋名山见")

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐

 16
16 0
0- 0



 已为社区贡献24条内容
已为社区贡献24条内容

{kind=link}
所有评论(0)