基于RBF神经网络的车速时序预测
基于RBF神经网络模型,根据历史车速信息,预测将来几秒预测时域的车速信息的时序预测模型(本程序先根据训练工况训练,采用训练后的神经网络模型,预测UDDS循环工况,每个时间点车速下将来几秒内 的车速信息)。 1.文件包括,训练工况(.mat数据,工况可自己选取最好与想要预测的工况类似,如预测工况是城郊工况,训练工况最好也选择同类的)以及测试工况(.mat数据, 自己选取想要预测的工况),以及REF预测主程序(.m程序); 2.车速预测程序基于matlab m编程完成,已备注好如何修改预测步长,可根据需求自己调整 ; 3.程序主要适用于MPC(模型预测控制)或其基于MPC的能量管理策略的车速预测部分,或其 他时序预测类也可参考(坡度预测、流量预测等)。
在自动驾驶和智能交通领域,准确预测车速对于诸如模型预测控制(MPC)及其相关能量管理策略等应用至关重要。今天咱们就来聊聊基于RBF神经网络模型,根据历史车速信息预测未来几秒车速的时序预测模型。
一、整体思路
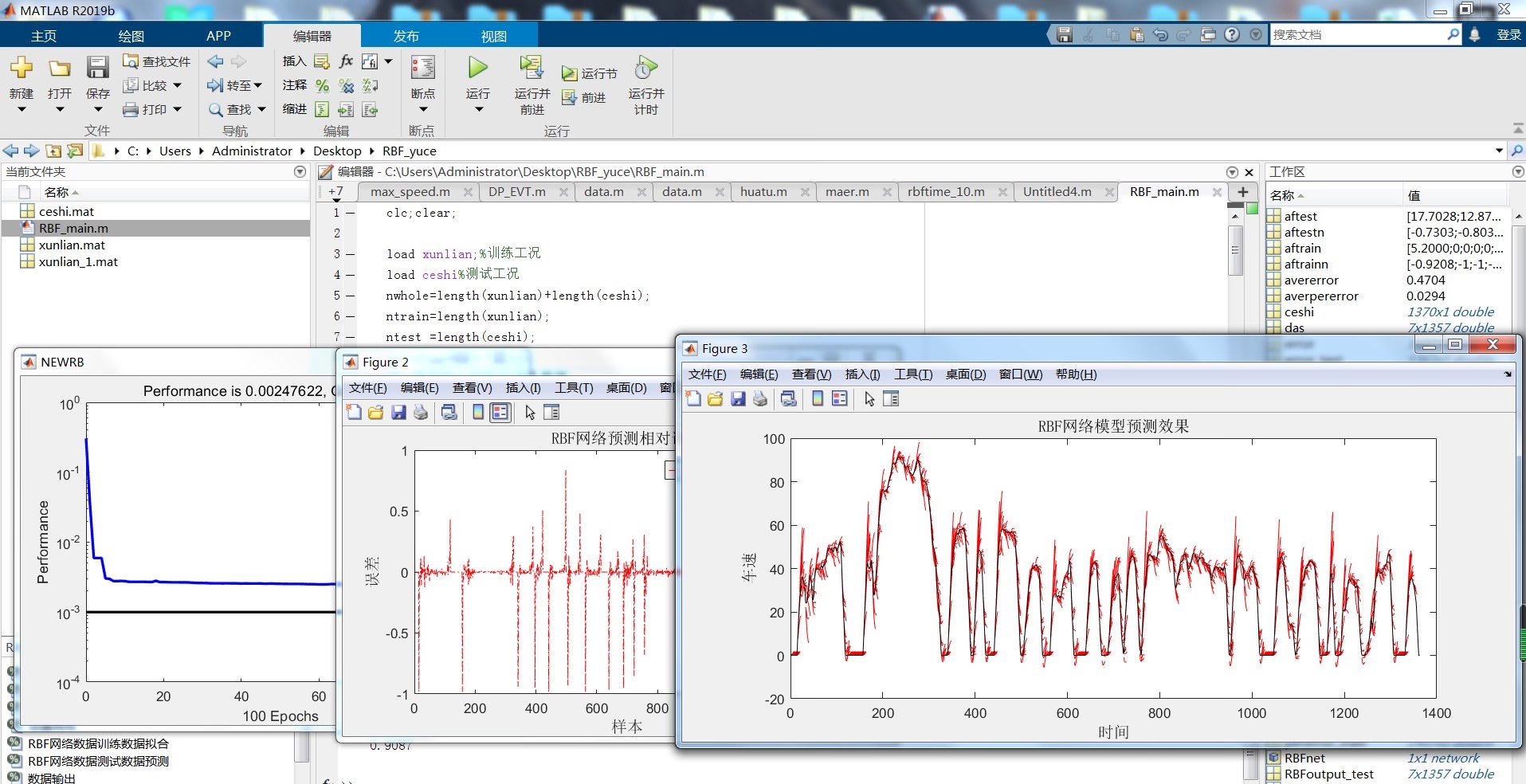
咱们要构建的这个模型,先得用训练工况的数据来训练RBF神经网络。训练好了之后呢,再拿这个训练好的神经网络去预测UDDS循环工况下每个时间点车速之后几秒内的车速信息。这就好比先让模型学习怎么“看”历史车速规律,然后让它用学到的本事去预测未来车速。
二、所需文件
- 训练工况:数据格式是.mat 。这里选择的训练工况最好和想要预测的工况类似,如果预测工况是城郊工况,那训练工况也选城郊相关的。为啥呢?因为相似工况的数据能让模型更好地学习到共有的车速变化模式。比如城郊工况可能车速变化相对平稳且有一定周期性,类似工况数据训练出来的模型,对这种模式就更敏感。
- 测试工况:同样是.mat数据格式。这个就是咱们实际要预测的工况数据啦,像UDDS循环工况数据就可以放这儿。
- REF预测主程序:格式是.m程序。这可是整个预测流程的“指挥中心”,它把训练和预测的步骤串起来,让模型按咱们的想法工作。
三、Matlab M编程实现
整个车速预测程序是基于Matlab M语言完成的。下面咱们来看点关键代码片段(假设这是REF预测主程序中的部分代码):
% 加载训练工况数据
load('training_condition.mat');
% 这里的training_condition.mat就是之前提到的训练工况数据文件
% 数据加载后就可以提取车速等相关信息用于训练
% 设置RBF神经网络参数
net = newrb(training_inputs, training_targets, 0, 1, 100);
% newrb是Matlab中创建RBF神经网络的函数
% training_inputs是训练输入数据,比如历史车速序列
% training_targets是对应的目标输出,也就是未来几秒的实际车速
% 0表示最小均方误差目标,1是扩展常数,100是神经元的最大数量
% 加载测试工况数据
load('test_condition.mat');
% 加载用于测试预测效果的工况数据
% 进行车速预测
predicted_speeds = sim(net, test_inputs);
% sim函数用于利用训练好的神经网络net对测试输入test_inputs进行预测
% 得到的predicted_speeds就是预测出的未来几秒车速代码里很贴心地备注好了如何修改预测步长,咱们可以根据实际需求调整。比如说,如果想预测未来5秒的车速,可能某些参数就要调整一下,以适应这个预测步长的变化。
四、应用场景
这个程序主要适用于MPC或基于MPC的能量管理策略里的车速预测部分。为啥适合MPC呢?因为MPC需要提前知道未来的车速等信息,才能更好地规划控制策略。比如在自动驾驶车辆中,MPC可以根据预测的车速来提前调整油门、刹车等控制量,让车辆行驶更平稳、高效。
基于RBF神经网络模型,根据历史车速信息,预测将来几秒预测时域的车速信息的时序预测模型(本程序先根据训练工况训练,采用训练后的神经网络模型,预测UDDS循环工况,每个时间点车速下将来几秒内 的车速信息)。 1.文件包括,训练工况(.mat数据,工况可自己选取最好与想要预测的工况类似,如预测工况是城郊工况,训练工况最好也选择同类的)以及测试工况(.mat数据, 自己选取想要预测的工况),以及REF预测主程序(.m程序); 2.车速预测程序基于matlab m编程完成,已备注好如何修改预测步长,可根据需求自己调整 ; 3.程序主要适用于MPC(模型预测控制)或其基于MPC的能量管理策略的车速预测部分,或其 他时序预测类也可参考(坡度预测、流量预测等)。
除了MPC相关应用,其他时序预测类场景也能参考。像坡度预测,在山区道路自动驾驶场景下,提前预测前方坡度变化,能帮助车辆提前调整动力系统;流量预测,对于智能交通系统规划交通流量、优化信号灯等都有重要意义。
总的来说,这个基于RBF神经网络的车速时序预测模型,在交通和控制领域有着不小的应用潜力,大家不妨根据实际需求好好探索一下。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐
 1
1 0
0- 0



 已为社区贡献17条内容
已为社区贡献17条内容

所有评论(0)