模型预测控制专题(八)—— 无模型电流预测带宽参数影响分析
0 前言
在上一节我们分析了无模型电流预测控制中的比例增益的影响。具体带宽因素的影响还未进行分析。领导要求把参数的影响全都评估一遍,那就都弄了吧。
模型预测控制专题(七)—— 无模型电流预测比例增益影响分析-CSDN博客
1 带宽参数影响分析
我们这一节固定比例增益参数为标称参数,转而测试带宽参数对系统的影响。仿真分别测试带宽为1000、2000、3000、4000、5000、6000、7000、8000、10000带宽参数的影响;
- 第一个角度仍然是跟随特性(电流超调、调节时间)
- 第二个角度是1000rpm额定负载工况稳态跟踪性能(稳态误差,电流idiq峰峰值),
- 第三个是1000rpm额定负载工况谐波性能(电流THD)
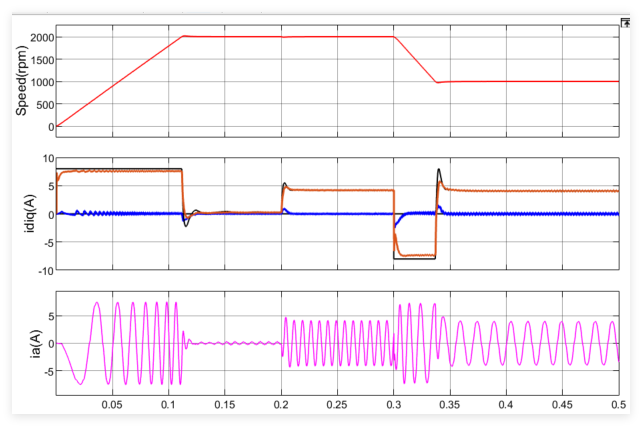
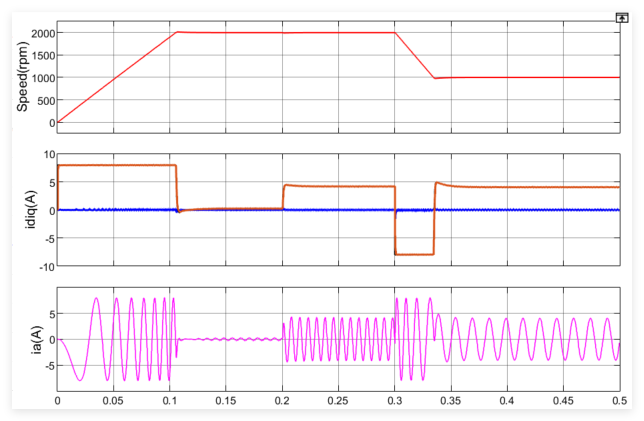
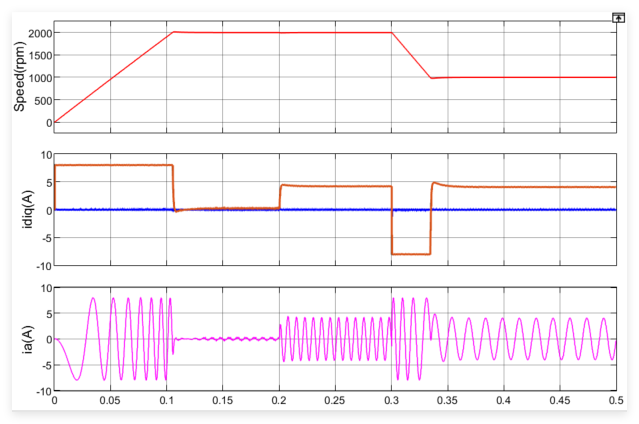
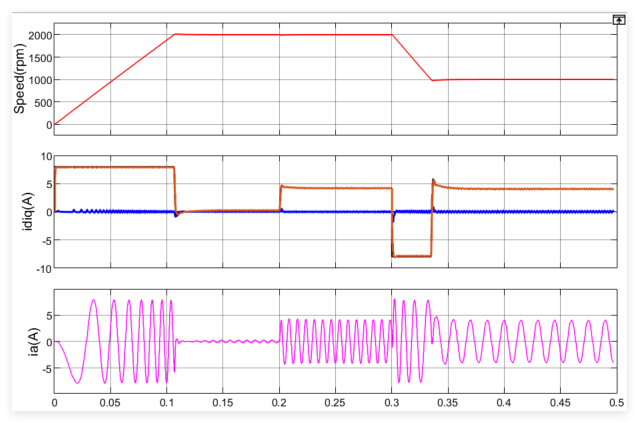
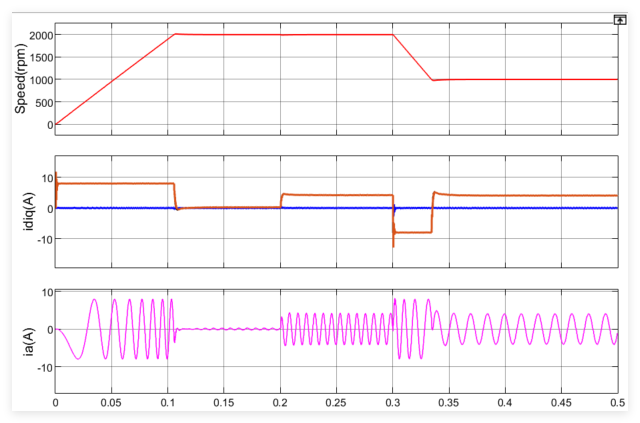
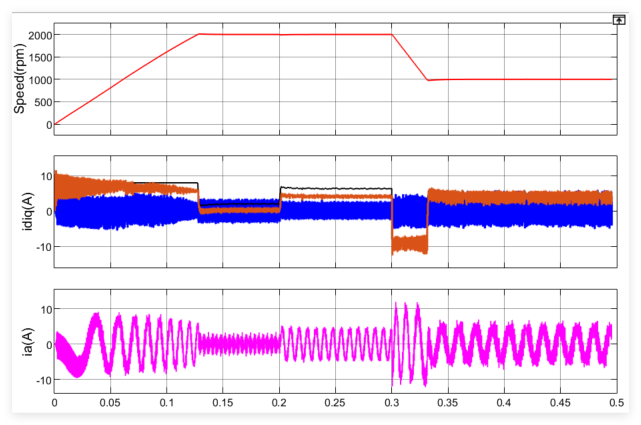
第一个:
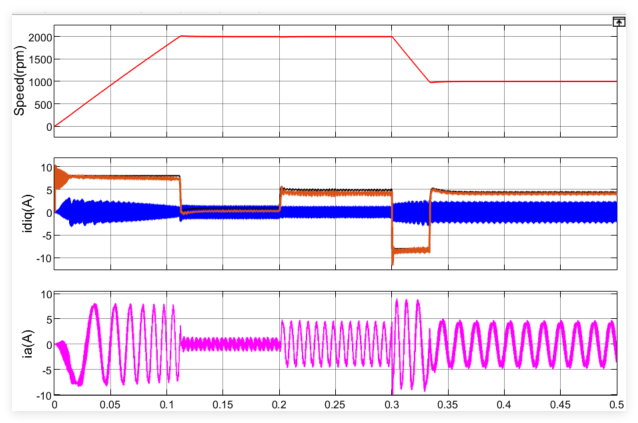
转速能够实现跟踪,dq轴电流基本无振荡,但是加速过程中电流iq无法跟随,此时无法评价具体的跟踪时间以及超调量,dq轴之间耦合效应非常强。稳态过程跟踪无静态误差,但是此时稳态电流THD较大。
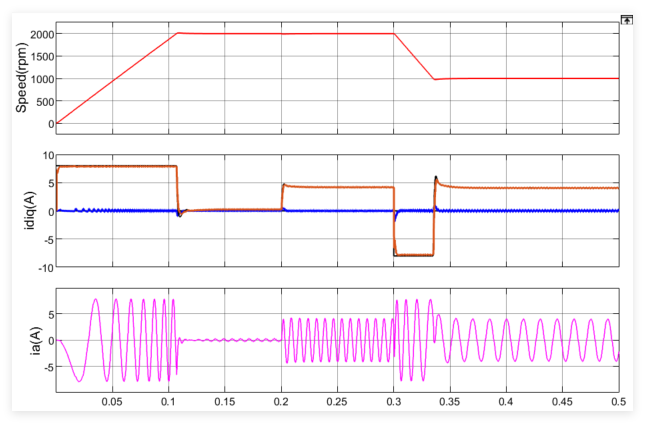
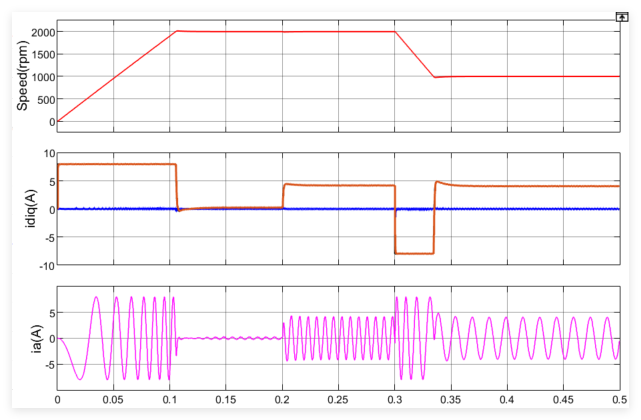
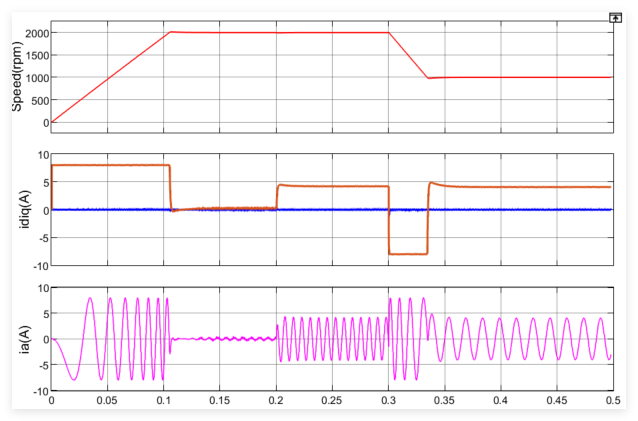
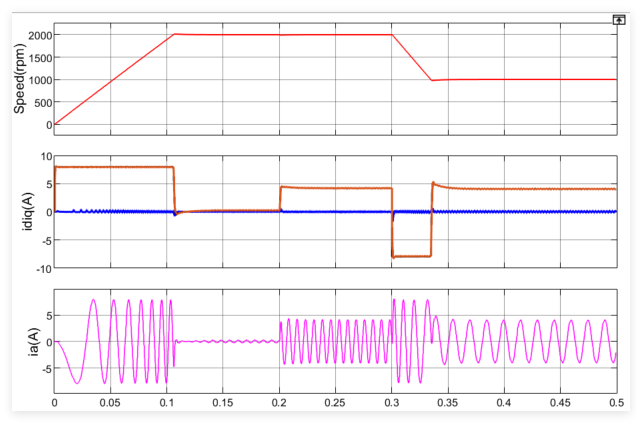
第二个:
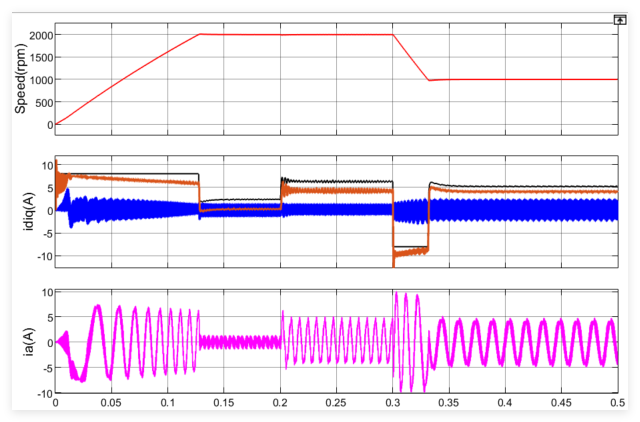
转速能够实现跟踪,dq轴电流基本无振荡,但是加速过程中电流iq跟随的静态误差明显改善,此时电机加速过程电流跟随的静态误差为0.2A,此时超调量为0,但是电流跟踪时间约为3.186ms,dq轴之间耦合效应较强。稳态过程跟踪无静态误差,但是此时稳态电流THD较大。
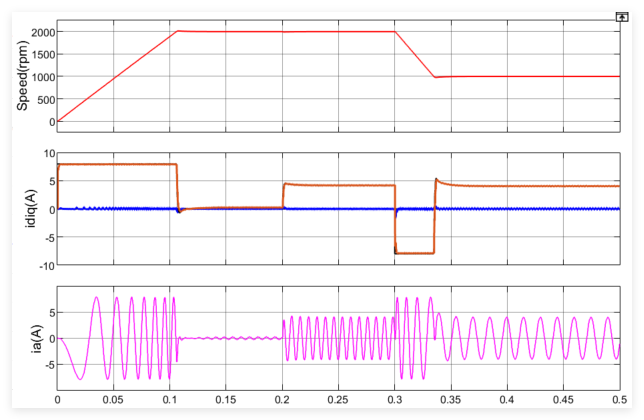
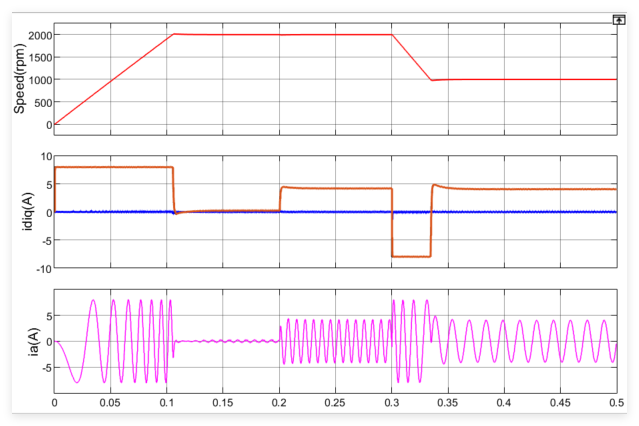
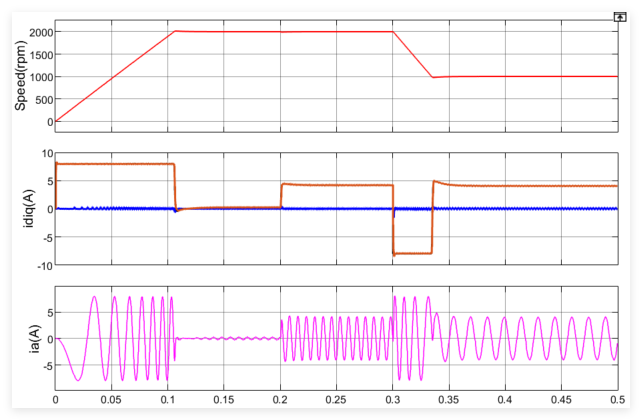
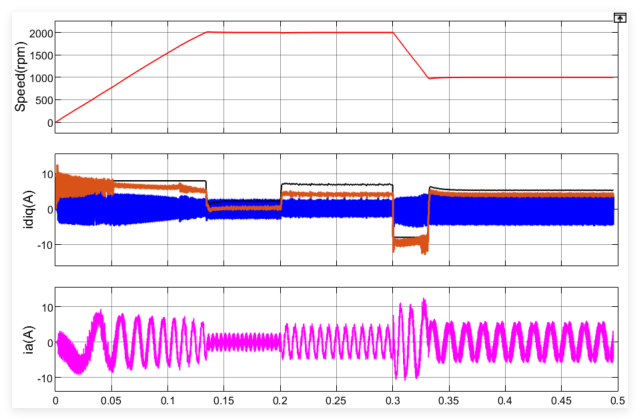
第三个:
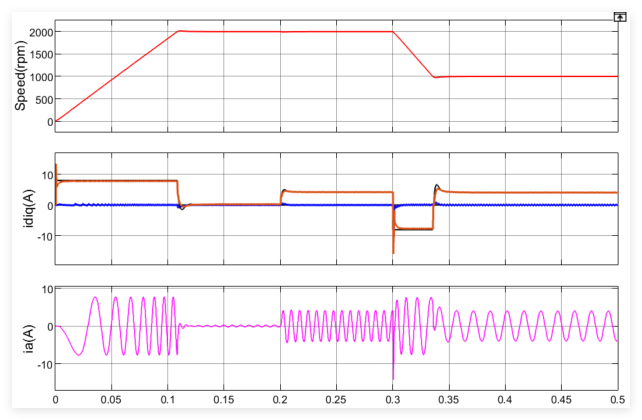
转速可实现跟踪,dq 轴电流基本无振荡;加速过程 iq 电流静差进一步改善,静差为 0 A,超调量 0,跟踪时间缩短至 2.081 ms,dq 轴耦合较强。稳态无静差,电流 THD 为 5.89%。
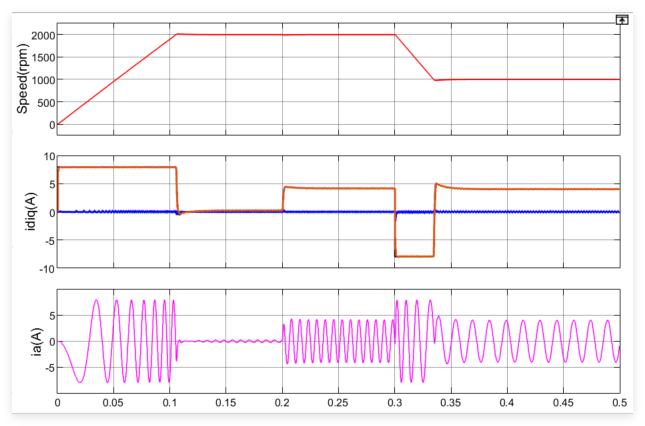
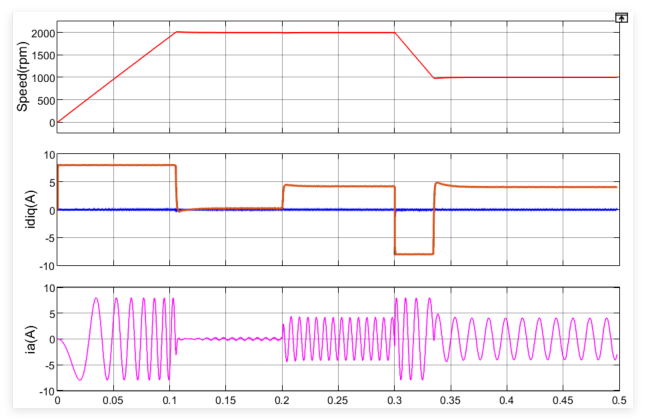
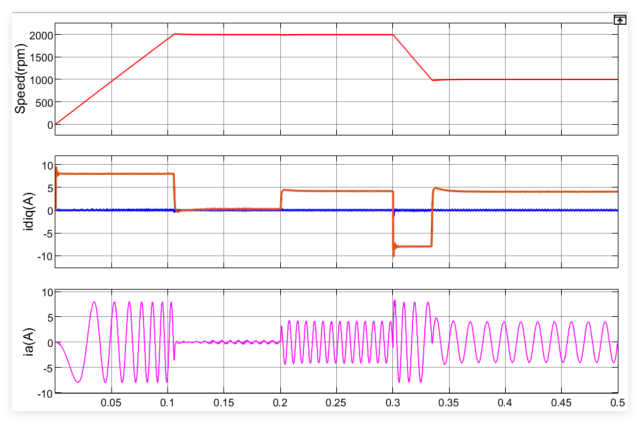
第四个:
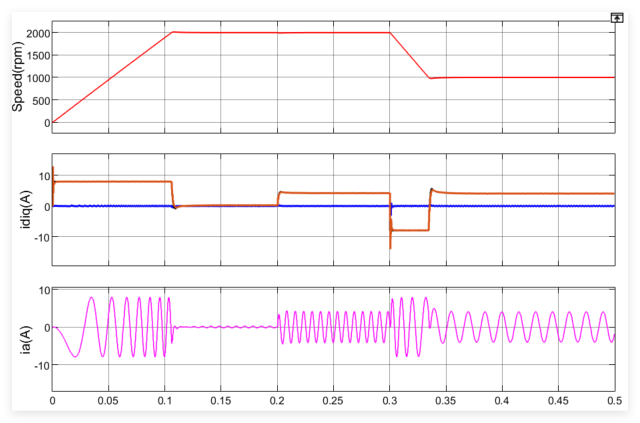
转速跟踪良好,dq 轴电流无明显振荡;iq 电流跟踪静差为 0,超调量 0,跟踪时间 1.45 ms,dq 轴耦合较弱于低带宽工况。稳态无静差,电流 THD 降至 5.62%。
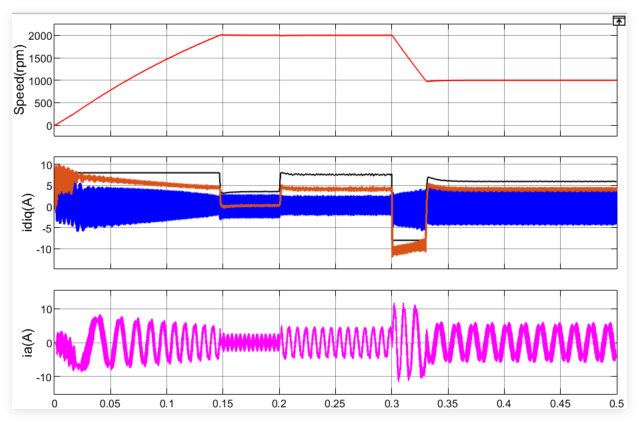
第五个:
转速可稳定跟踪,dq 轴电流振荡小;iq 静差为 0,超调 0,跟踪时间进一步缩短至 1.01 ms。稳态无静差,电流 THD 为 5.49%。
第六个:
转速跟踪性能良好,dq 轴电流平稳无明显振荡;iq 静差 0,超调 0,跟踪时间 0.81 ms。稳态无静差,电流 THD 为 5.41%。
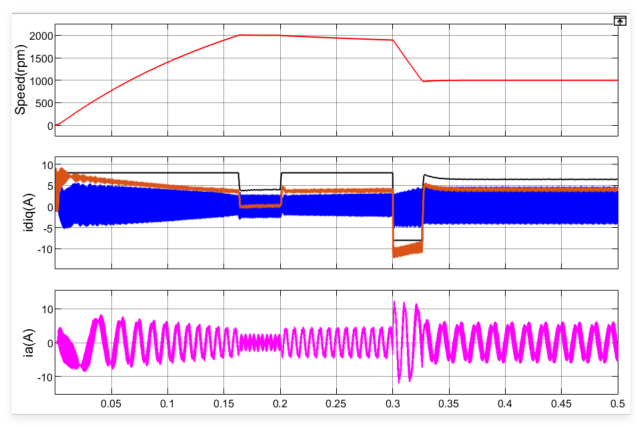
第七个:
转速跟踪准确,dq 轴电流基本无振荡;iq 静差 0,超调 0,电流跟踪时间 0.63 ms。稳态无静差,电流 THD 为 5.34%。
第八个:
转速可快速跟踪,dq 轴电流平稳;iq 静差 0,超调 0,跟踪时间 0.51 ms。稳态无静差,电流 THD 为 5.29%。
第九个:
转速跟踪迅速且平稳,dq 轴电流无明显振荡;iq 静差 0,超调 0,跟踪时间 0.47 ms。稳态无静差,电流 THD 为 5.27%。
第十个:
转速实现快速精准跟踪,dq 轴电流基本无振荡;iq 静差 0,超调 0,跟踪时间 0.44 ms。稳态无静差,电流 THD 为 5.28%。
|
带宽 (rad/s) |
跟随时间 (ms) |
电流超调(A) |
id静态误差(A) |
iq静态误差(A) |
id峰峰值(A) |
iq峰峰值(A) |
电流THD (%) |
|
1000 |
× |
× |
0 | 0 | 1.087 | 0.897 | 6.84% |
|
2000 |
3.186 | 0 | 0 | 0 | 1.10 | 0.821 | 6.31% |
|
3000 |
2.081 | 0 | 0 | 0 | 0.98 | 0.881 | 5.89% |
|
4000 |
1.45 | 0 | 0 | 0 | 0.89 | 0.79 | 5.62% |
|
5000 |
1.01 | 0 | 0 | 0 | 0.87 | 0.80 | 5.49% |
|
6000 |
0.81 | 0 | 0 | 0 | 0.856 | 0.79 | 5.41% |
|
7000 |
0.63 | 0 | 0 | 0 | 0.87 | 0.78 | 5.34% |
|
8000 |
0.51 | 0 | 0 | 0 | 0.86 | 0.77 | 5.29% |
|
9000 |
0.47 | 0 | 0 | 0 | 0.883 | 0.77 | 5.27% |
|
10000 |
0.44 | 0 | 0 | 0 | 0.89 | 0.79 | 5.28% |
总结为以下规律随着电流环带宽从 1000 rad/s 提升至 10000 rad/s:
- iq 电流跟踪静差从无法跟随逐步改善至 0 A;
- 电流跟踪时间持续缩短,动态响应显著加快;
- 超调量始终为 0,动态平稳性良好;
- 电流 THD整体呈下降趋势,稳态电流质量逐步提升;
- dq 轴耦合效应随带宽提升明显减弱。
2 非标称参数带宽参数影响分析
我们这一节固定比例增益参数为1.5倍标称参数,转而测试带宽参数对系统的影响。仿真分别测试带宽为1000、2000、3000、4000、5000、6000、7000、8000、10000带宽参数的影响;
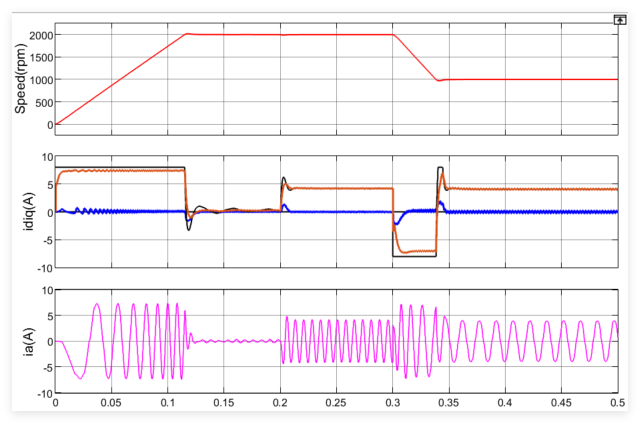
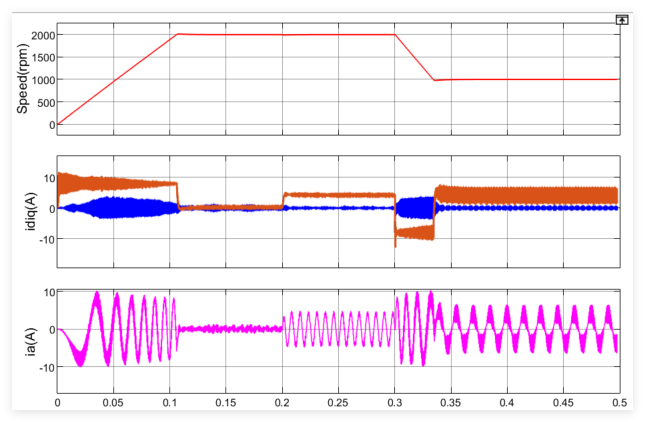
第一个:
系统转速可实现稳定跟踪,dq轴电流基本无振荡;但加速过程中iq电流无法有效跟随,导致无法准确评价电流跟踪时间及超调量,且dq轴之间耦合效应极强。稳态阶段,转速跟踪无静态误差,但稳态电流总谐波畸变率(THD)较大,达到7.42%;此时id静态误差为0 A,iq静态误差为0 A,id峰峰值为1.13 A,iq峰峰值为0.96 A。
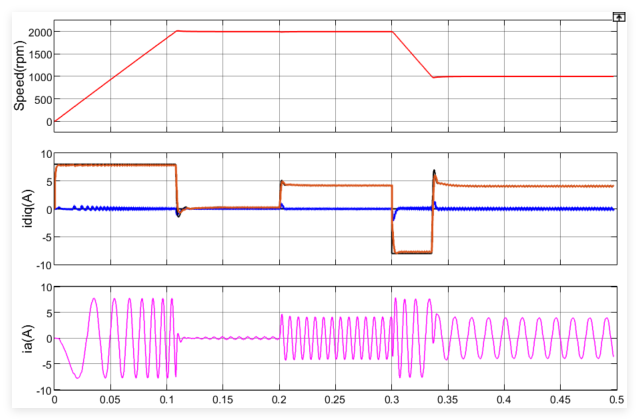
第二个:
系统转速可稳定跟踪,dq轴电流基本无振荡;加速过程中iq电流跟随的静态误差得到明显改善,电机加速过程中iq电流跟随静态误差为0 A,电流超调量为0 A,电流跟踪时间约为3.52 ms,dq轴之间仍存在较强耦合效应。稳态阶段跟踪无静态误差,稳态电流THD为7.02%;id峰峰值为1.10 A,iq峰峰值为0.94 A,id静态误差维持0 A。
第三个:
系统转速可实现稳定跟踪,dq轴电流基本无振荡;加速过程中iq电流静态误差进一步改善,静差维持为0 A,电流超调量为0 A,跟踪时间缩短至1.69 ms,dq轴耦合效应仍较强。稳态阶段无静态误差,电流THD降至6.59%;id峰峰值为1.08 A,iq峰峰值为0.9 A,id静态误差保持0 A。
第四个:
系统转速跟踪效果良好,dq轴电流无明显振荡;加速过程中iq电流跟踪静态误差为0 A,电流超调量为0.16 A,跟踪时间为1.87 ms,dq轴耦合效应较低于低带宽工况。稳态阶段无静态误差,电流THD进一步降至6.26%;id峰峰值为1.10 A,iq峰峰值为0.89 A,id静态误差始终为0 A。
第五个:
系统转速可实现稳定跟踪,dq轴电流振荡幅度较小;加速过程中iq电流静态误差为0 A,电流超调量为0.3 A,跟踪时间进一步缩短至1.77 ms。稳态阶段无静态误差,电流THD为5.96%;id峰峰值为0.95 A,iq峰峰值为0.81 A,id静态误差保持0 A。
第六个:
系统转速跟踪性能良好,dq轴电流平稳且无明显振荡;加速过程中iq电流静态误差为0 A,电流超调量为0.6 A,跟踪时间为1.57 ms。稳态阶段无静态误差,电流THD为5.75%;id峰峰值为0.92 A,iq峰峰值为0.84 A,id静态误差维持0 A。
第七个:
系统转速跟踪准确,dq轴电流基本无振荡;加速过程中iq电流静态误差为0 A,电流超调量为0.91 A,跟踪时间为1.8 ms。稳态阶段无静态误差,电流THD为5.6%;id峰峰值为0.91 A,iq峰峰值为0.81 A,id静态误差始终为0 A。
第八个:
系统转速可实现快速跟踪,dq轴电流运行平稳;加速过程中iq电流静态误差为0 A,电流超调量增至1.6 A,跟踪时间延长至4.17 ms。稳态阶段无静态误差,电流THD降至5.48%;id峰峰值为0.87 A,iq峰峰值为0.82 A,id静态误差保持0 A。
第九个:
系统转速虽可跟踪,但加速过程中iq电流无法正常跟随,无法评价电流跟踪时间及超调量;此时iq静态误差增至0.52 A,dq轴耦合效应显著增强。稳态阶段转速跟踪无静态误差,但稳态电流THD急剧升高至32.14%,电流质量严重下降;id峰峰值为4.86 A,iq峰峰值为1.60 A,id静态误差仍为0 A。
第十个:
系统转速可实现跟踪,但加速过程中iq电流无法有效跟随,无法评价电流跟踪时间及超调量;iq静态误差进一步增大至2.1 A,dq轴耦合效应极强。稳态阶段转速跟踪无静态误差,稳态电流THD维持在32.28%的高位,电流质量极差;id峰峰值为4.96 A,iq峰峰值为1.59 A,id静态误差保持0 A。
|
带宽 (rad/s) |
跟随时间 (ms) |
电流超调(A) |
id静态误差(A) |
iq静态误差(A) |
id峰峰值(A) |
iq峰峰值(A) |
电流THD (%) |
|
1000 |
× |
× |
0 | 0 | 1.13 | 0.96 | 7.42% |
|
2000 |
3.52 | 0 | 0 | 0 | 1.10 | 0.94 | 7.02% |
|
3000 |
1.69 | 0 | 0 | 0 | 1.08 | 0.9 | 6.59% |
|
4000 |
1.87 | 0.16 | 0 | 0 | 1.10 | 0.89 | 6.26% |
|
5000 |
1.77 | 0.3 | 0 | 0 | 0.95 | 0.81 | 5.96% |
|
6000 |
1.57 | 0.6 | 0 | 0 | 0.92 | 0.84 | 5.75% |
|
7000 |
1.8 | 0.91 | 0 | 0 | 0.91 | 0.81 | 5.6% |
|
8000 |
4.17 | 1.6 | 0 | 0 | 0.87 | 0.82 | 5.48% |
|
9000 |
× | × | 0 | 0.52 | 4.86 | 1.60 | 32.14 |
|
10000 |
× | × | 0 | 2.1 | 4.96 | 1.59 | 32.28 |
总结为以下规律随着电流环带宽从 1000 rad/s 提升至 10000 rad/s:
-
iq电流跟踪性能:整体呈现“改善—稳定—恶化”的趋势,从1000 rad/s时无法跟随,逐步改善至2000~8000 rad/s时静态误差为0 A,当带宽提升至9000~10000 rad/s时,iq静态误差急剧增大,无法正常跟随。
-
电流跟踪时间:在1000~6000 rad/s范围内,跟踪时间随带宽提升持续缩短,动态响应逐步加快;7000~8000 rad/s时跟踪时间略有波动,9000~10000 rad/s时系统振荡明显。
-
电流超调量:并非始终为0,在2000 rad/s时超调量为0 A,3000 rad/s时维持0 A,4000~8000 rad/s时超调量逐步增大,从0.16 A增至1.6 A,9000~10000 rad/s时系统振荡。
-
电流THD:在1000~8000 rad/s范围内,整体呈持续下降趋势,从7.42%降至5.48%,稳态电流质量逐步提升;当带宽超过8000 rad/s后,THD急剧升高至32%以上,电流质量严重恶化。
-
dq轴耦合效应:在1000~8000 rad/s范围内,随带宽提升逐步减弱;当带宽提升至9000~10000 rad/s时,控制失效,无法稳定跟踪,系统剧烈振荡。
3 非标称参数带宽参数影响分析
我们这一节固定比例增益参数为0.5倍标称参数,转而测试带宽参数对系统的影响。仿真分别测试带宽为1000、2000、3000、4000、5000、6000、7000、8000、10000带宽参数的影响;
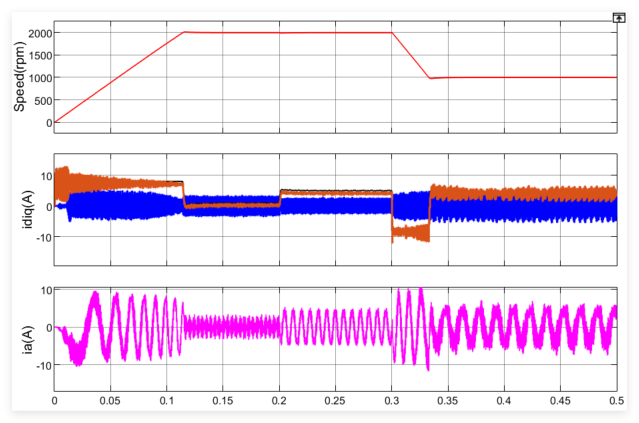
第一个:
第二个:
第三个:
第四个:
第五个:
第六个:
第七个:
第八个:
第九个:
第十个:
整体表格:
|
带宽 (rad/s) |
跟随时间 (ms) |
电流超调(A) |
id静态误差(A) |
iq静态误差(A) |
id峰峰值(A) |
iq峰峰值(A) |
电流THD (%) |
|
1000 |
11.8 | 5.34 | 0 | 0 | 1.02 | 0.78 | 5.98 |
|
2000 |
3.75 | 5.08 | 0 | 0 | 0.87 | 0.79 | 5.54 |
|
3000 |
2.94 | 3.74 | 0 | 0 | 0.96 | 0.81 | 5.44 |
|
4000 |
× |
× |
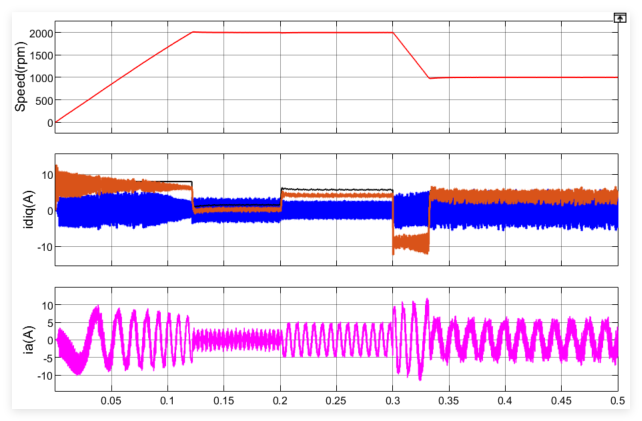
0 | 0 | 2.39 | 6.02 | 43.76 |
|
5000 |
× |
× |
0 | 1.1 | 10.75 | 5.72 | 67.77 |
|
6000 |
× | × | 0 | 2.1 | 11.36 | 5.39 | 68.36 |
|
7000 |
× | × | 0 | 2.5 | 11.06 | 5.467 | 65.30 |
|
8000 |
× | × | 0 | 2.8 | 9.21 | 2.51 | 61.91 |
|
9000 |
× | × | 0 | 3.8 | 8.97 | 2.27 | 62.00 |
|
10000 |
× | × | 0 | 4.2 | 9.02 | 2.23 | 62.00 |
这里有一个非常大的区别,到4000rad/s 时已经出现了严重的系统振荡了,而1.5倍标称值的时候,一直到9000才出现较为明显的振荡。
总结
我们从以上现象分析可以得到以下规律:
1、在比例参数完全符合标称参数时,系统带宽参数越大越好,电流THD低、跟随速度快。属于是全方面性能的提升。(不能无限增大,通常建议不要超过系统开关频率的五分之一。推荐带宽参数设置为开关频率的十分之一,例如开关频率为10kHz,其十分之一为6283rad/s)
2、在比例参数不符合标称参数时,在标称参数不振荡的带宽下也会出现振荡;
3、实际比例参数偏离标称参数越远,带宽参数能够被拓展的极限越小;如果反过来讲,带宽参数设置得越高,比例参数稳定性区域越小,两者是相互作用的。
4、假如设定优先级,比例参数属于是与电机电感参数相关的参数,其准确性应优先解决,而带宽参数则可以考虑为典型值例如开关频率的十分之一。
这个参数仿真探究的过程,非常类似PI调节器的PI参数,我甚至觉得这就是一种PI调节器的拓展。
以上过程仅属于个人学习过程的思考和总结,不一定完全正确。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐
 5
5 0
0- 0



 已为社区贡献11条内容
已为社区贡献11条内容

所有评论(0)