Matlab 四旋翼无人机 ADRC 姿态控制器仿真:探索飞行的奥秘
Matlab四旋翼无人机ADRC姿态控制器仿真,已调好,附带相关参考文献~ 无人机姿态模型,力矩方程,角运动方程 包含三个姿态角的数学模型,以及三个adrc控制器。 简洁易懂,也可自行替换其他控制器。
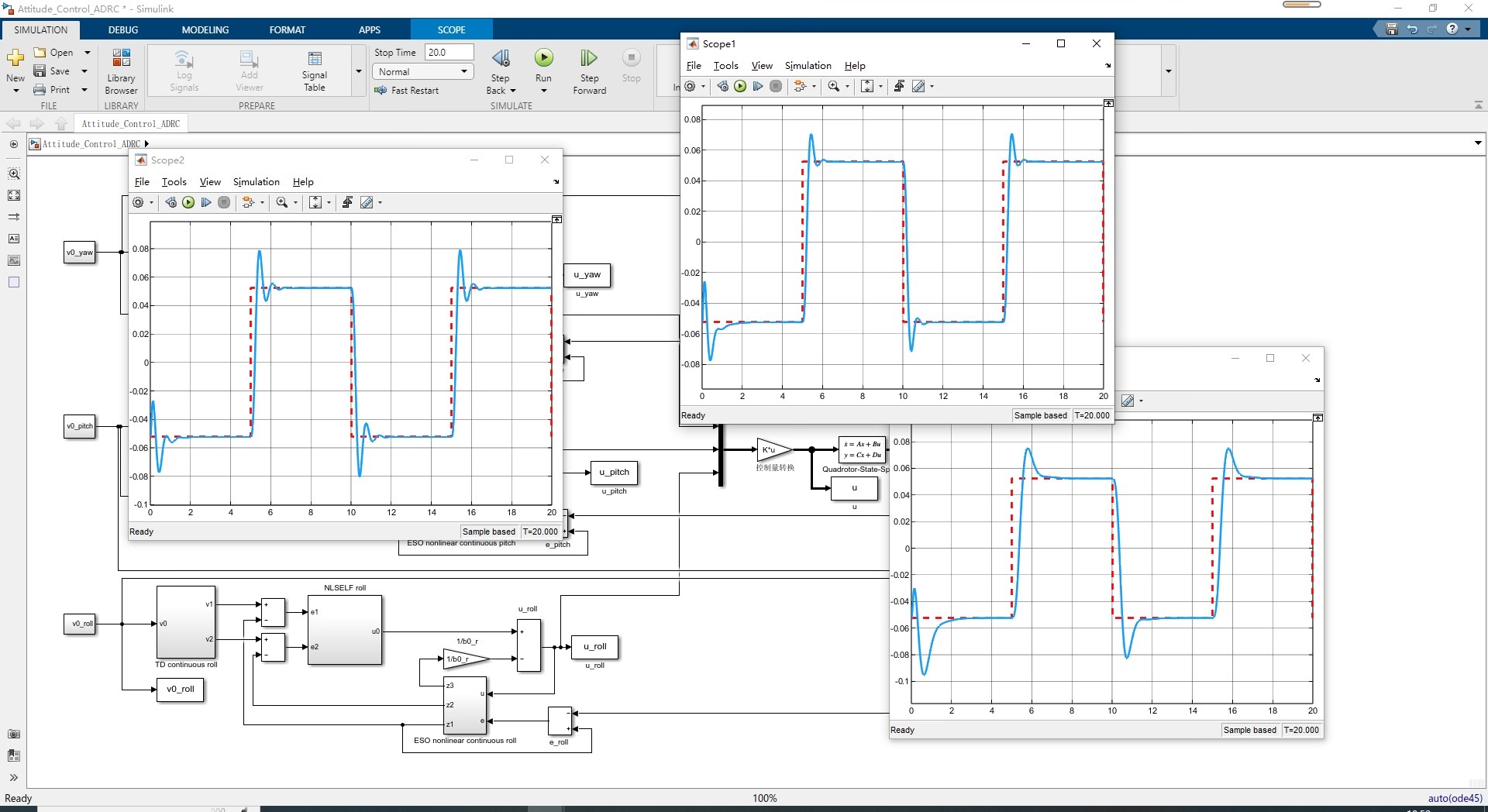
在无人机的研究领域,姿态控制是核心中的核心,它关乎着无人机能否稳定飞行、精确执行各类任务。今天,咱就唠唠 Matlab 下四旋翼无人机 ADRC 姿态控制器的仿真那些事儿,而且这已经调好啦,还附带相关参考文献,包你看得明明白白。
一、无人机姿态模型
力矩方程与角运动方程
无人机在空中的姿态变化,得依靠这力矩方程和角运动方程来描述。简单来讲,力矩方程就是说作用在无人机上的力矩会引起它的转动。比如说,在 X 轴方向上,力矩 $M_x$ 就会让无人机绕 X 轴转动,这就好比你推一个轮子,给它一个力让它转起来一样。
角运动方程呢,就是描述这种转动具体是怎么变化的,它和力矩方程紧密相关。在 Matlab 里,我们可以这样简单示意一下这些方程的关系(这里只是简单示意概念,非完整代码):
% 假设已经定义了相关参数,如质量 m、惯量 I 等
% 力矩方程示例,以 X 轴为例
M_x = some_function_of_forces_and_distances;
% 角运动方程示例,以 X 轴为例
alpha_x = M_x / I_x; % alpha_x 是 X 轴角加速度三个姿态角的数学模型
无人机的姿态通常用三个姿态角来描述:滚转角(Roll)、俯仰角(Pitch)和偏航角(Yaw)。每个姿态角都有对应的数学模型。
Matlab四旋翼无人机ADRC姿态控制器仿真,已调好,附带相关参考文献~ 无人机姿态模型,力矩方程,角运动方程 包含三个姿态角的数学模型,以及三个adrc控制器。 简洁易懂,也可自行替换其他控制器。
比如说滚转角 $\phi$ 的模型,它和 X 轴方向的力矩、角加速度等都有关系。在 Matlab 里建模的时候,大概是这样(依然是简单示意):
% 计算滚转角相关变量
omega_x_dot = (M_x - (I_y - I_z) * omega_y * omega_z) / I_x;
phi_dot = omega_x + sin(phi) * tan(theta) * omega_y + cos(phi) * tan(theta) * omega_z;
phi = phi + phi_dot * dt; % dt 是时间步长这段代码里,先根据力矩和惯量等计算出 X 轴的角加速度 omegaxdot,然后再算出滚转角的变化率 phi_dot,最后根据时间步长 dt 更新滚转角 phi。俯仰角和偏航角的模型类似,只是涉及的轴和参数不同而已。
二、ADRC 控制器
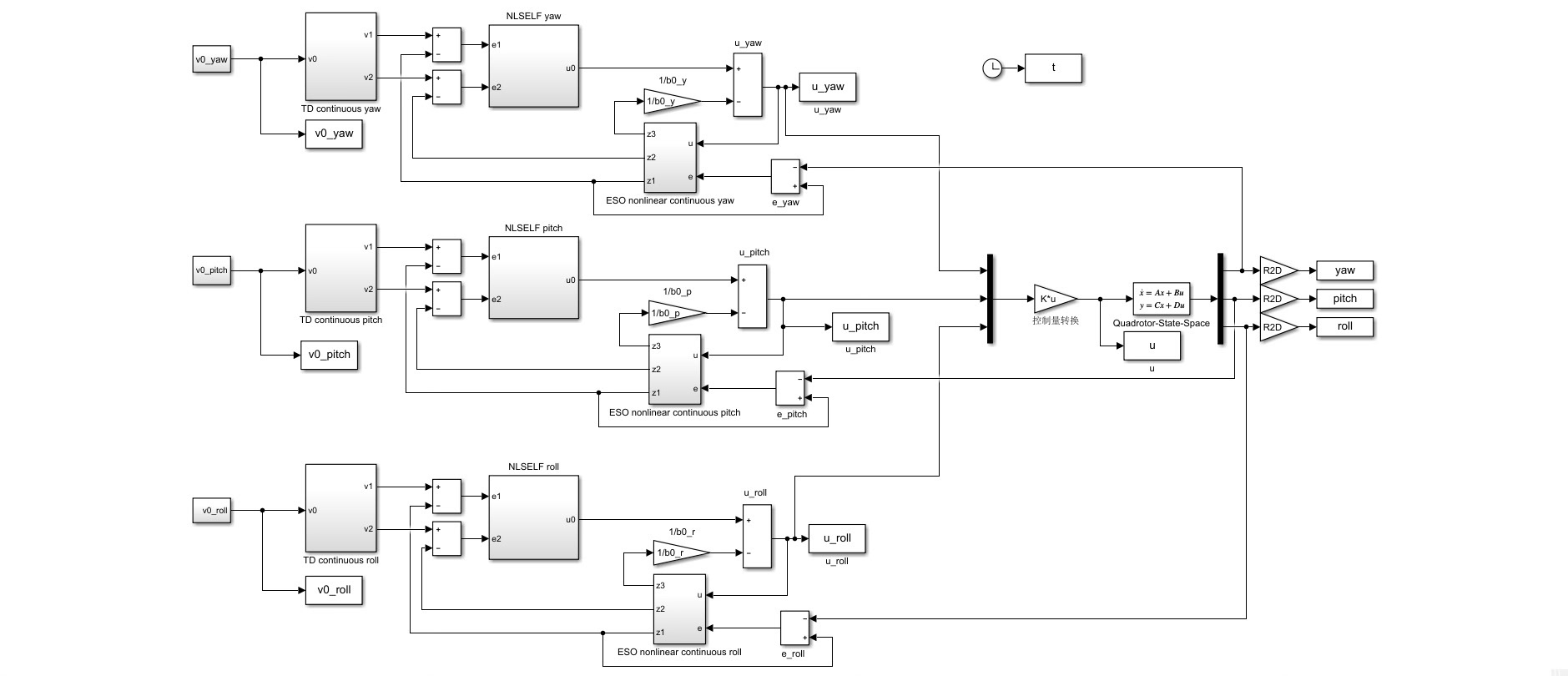
这里用到了三个 ADRC(自抗扰控制器),分别对应三个姿态角。ADRC 控制器厉害在哪呢?它能够对系统中的不确定因素进行估计和补偿,就好像给无人机装上了一个智能的“感知调节系统”,让它在面对各种复杂的干扰时依然能稳定飞行。
ADRC 控制器示例代码及分析
下面咱看一段简单的 ADRC 控制器代码(以滚转角控制为例,简化版):
% ADRC 控制器参数设定
beta01 = 100;
beta02 = 200;
beta1 = 30;
beta2 = 60;
beta3 = 100;
b0 = 1;
% 状态变量初始化
z1 = 0;
z2 = 0;
z3 = 0;
% 假设已经获取到当前滚转角 phi 和目标滚转角 phi_ref
e = phi_ref - phi;
z1 = z1 + (beta01 * e - z2) * dt;
z2 = z2 + (beta02 * e - z3 - b0 * omega_x) * dt;
z3 = z3 + (-beta1 * z1 - beta2 * z2 - beta3 * z3) * dt;
u0 = (phi_ref - z1) * beta1 - z2 * beta2;
u = u0 / b0;代码开始分析哈,首先设定了一堆控制器参数,这些参数就像是 ADRC 控制器的“性格设定”,决定了它对不同情况的响应方式。然后初始化一些状态变量,这就好比给这个控制器一个“初始状态”。接着计算当前滚转角和目标滚转角的误差 e。
在后续的计算中,通过不断更新状态变量 z1、z2、z3,这里面的计算逻辑其实就是 ADRC 控制器对系统状态进行估计和调节的过程。最后算出控制量 u,这个 u 就用来调整无人机,让它往目标滚转角靠近。
三、总结与拓展
咱这次搞的 Matlab 四旋翼无人机 ADRC 姿态控制器仿真,把姿态模型和 ADRC 控制器结合得死死的,实现了对无人机姿态的有效控制。而且这个仿真代码简洁易懂,要是你对控制器有别的想法,完全可以自行替换其他控制器,开启属于你自己的无人机控制探索之旅。
参考文献:[列出你所参考的文献],这些文献里有更深入的理论知识和研究成果,感兴趣的小伙伴可以去深挖。希望这篇博文能给研究无人机姿态控制的朋友们带来启发,一起在无人机的技术海洋里畅游!

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐



 0
0 0
0- 0



 已为社区贡献21条内容
已为社区贡献21条内容

所有评论(0)