基于扰动观测器的伺服系统摩擦补偿仿真研究:离散化模型与抗饱和PI控制器的应用
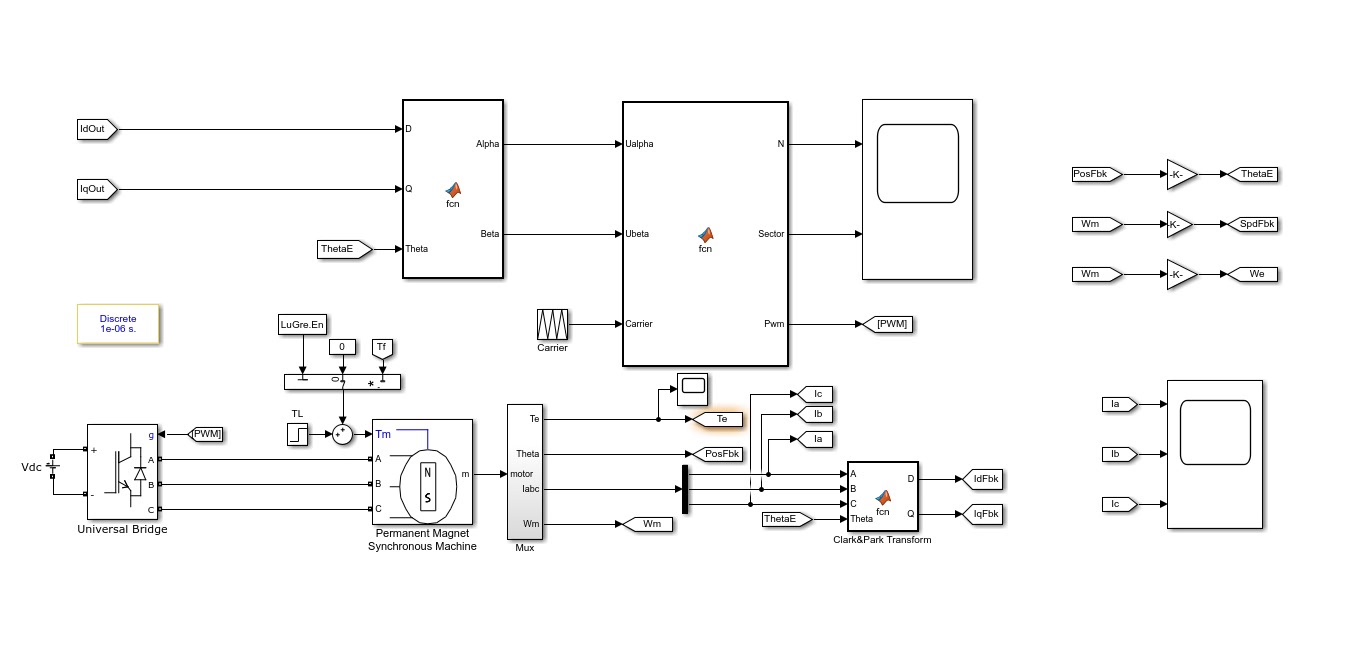
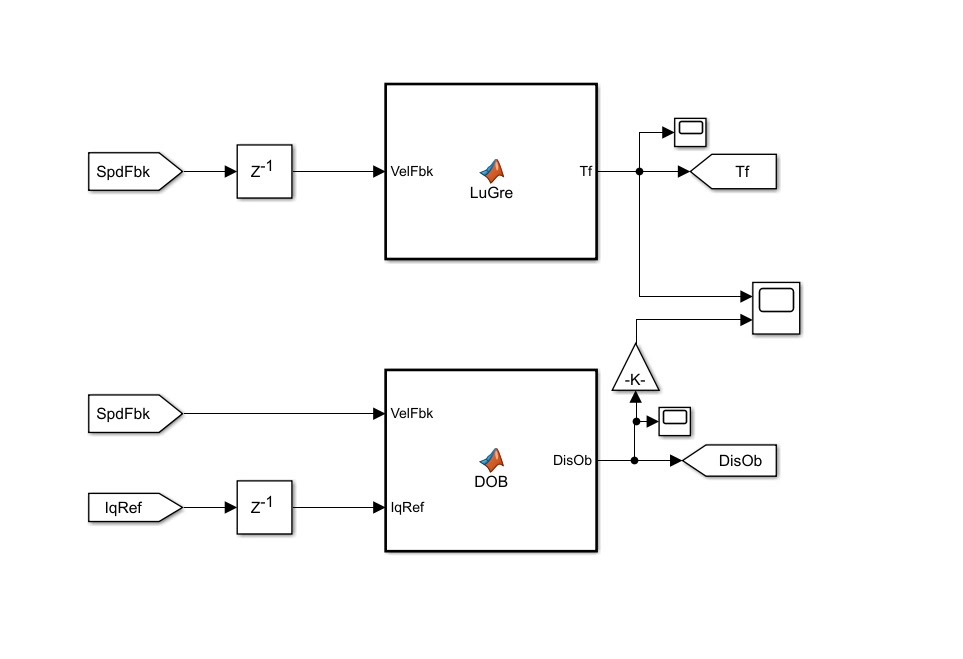
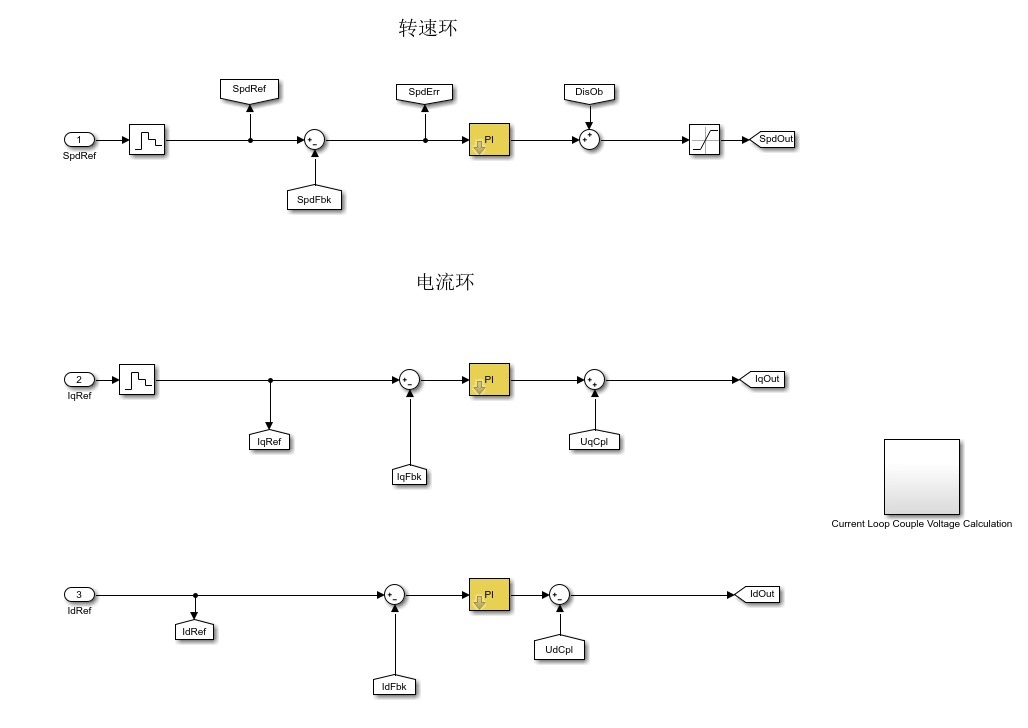
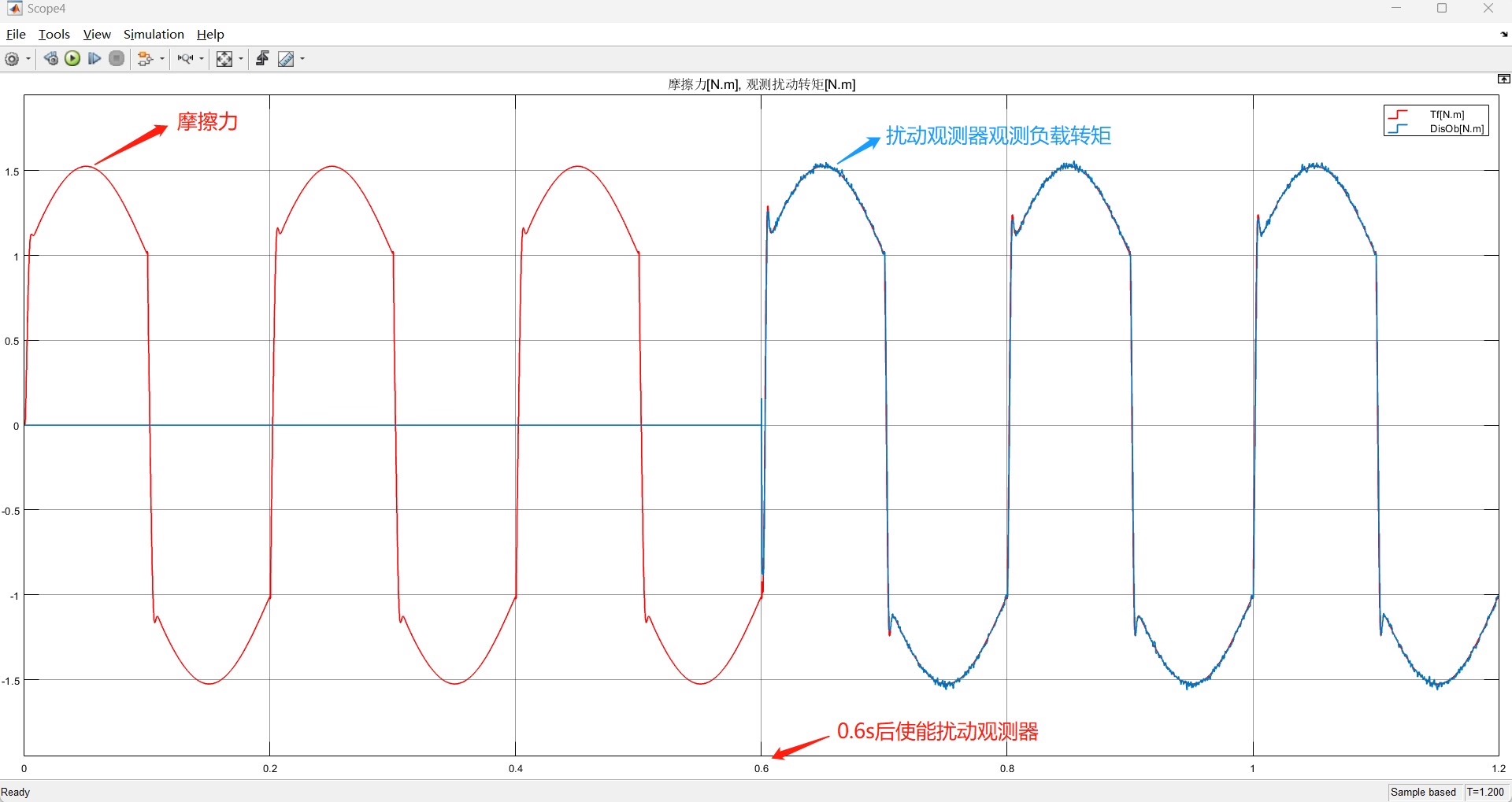
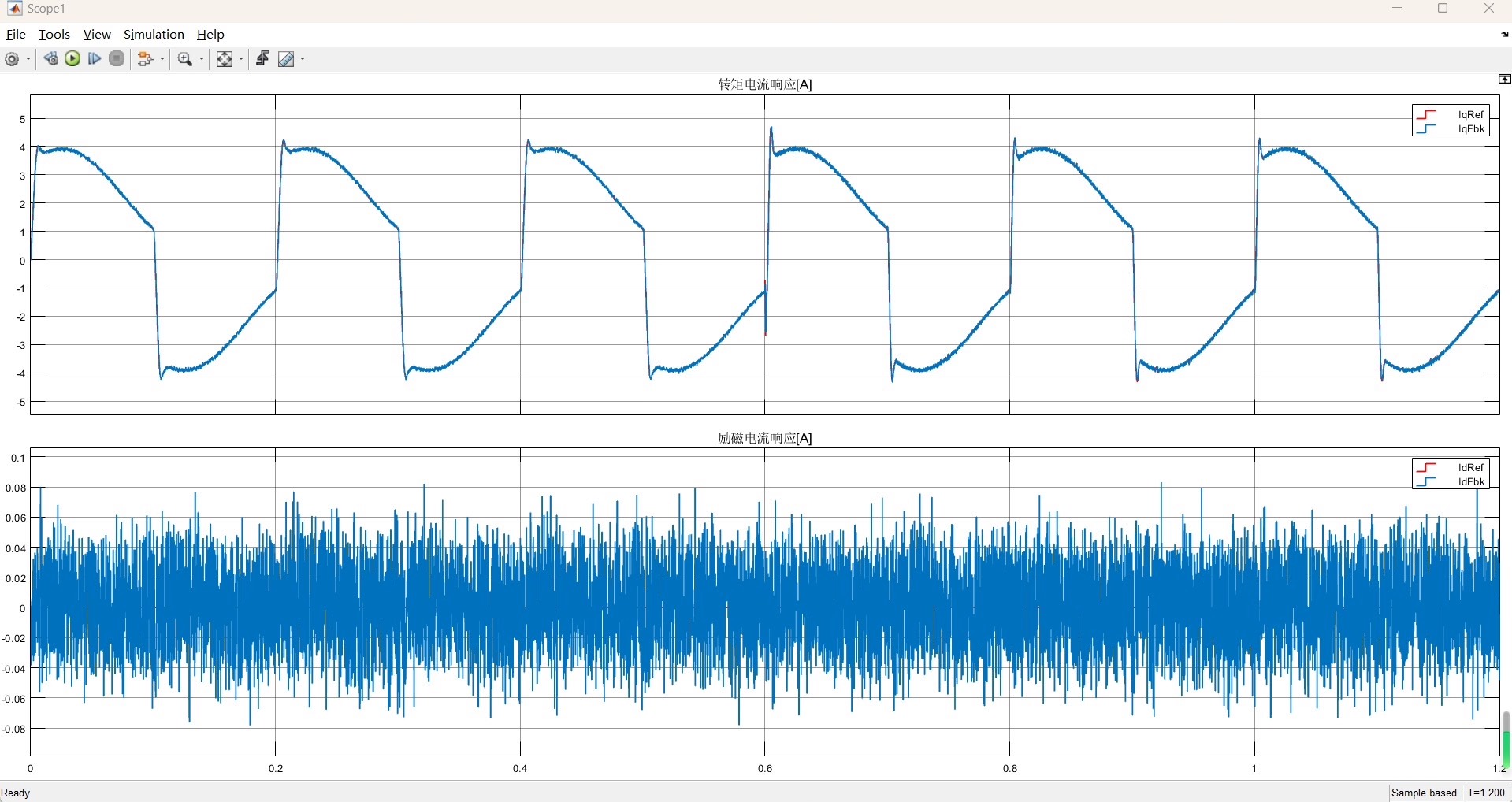
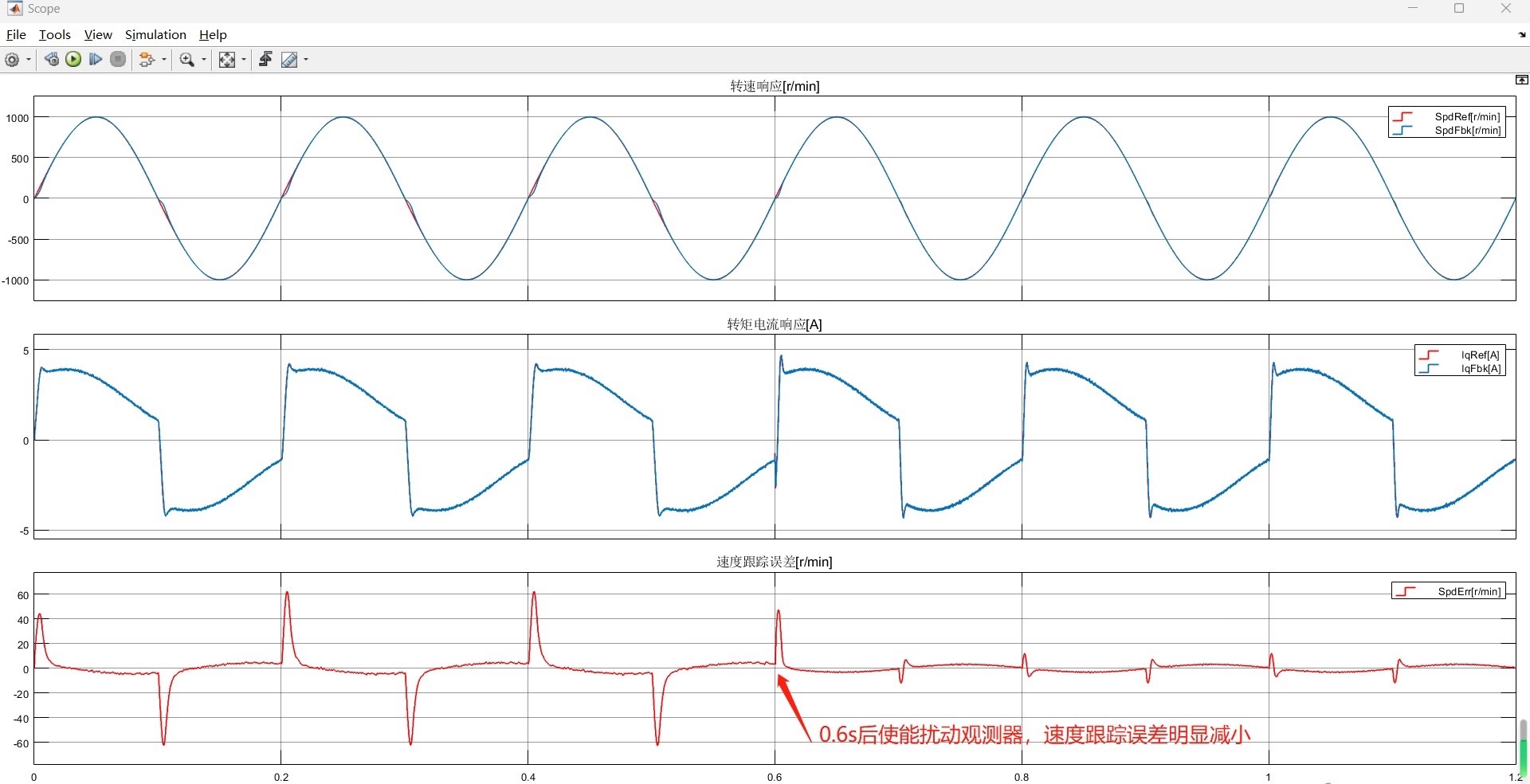
基于扰动观测器的伺服系统摩擦补偿Matlab仿真 1.模型简介 模型为基于扰动观测器的摩擦补偿仿真,仿真基于永磁同步电机速度、电流双闭环控制结构开发,双环均采用PI控制,PI参数已经调好。 仿真中主要包含抗饱和PI控制器、摩擦力模型、扰动观测器、坐标变换、SVPWM、逆变器和永磁同步电机模块等,其中抗饱和PI控制器、摩擦力模型、扰动观测器、坐标变换、SVPWM模块均采用matlab function编程实现,其与C语言编程较为相似,容易进行实物移植。 模型均采用离散化仿真,其效果更接近实际数字控制系统。 2.算法简介 伺服系统中,由于摩擦力的存在,会降低系统响应,因此对摩擦力进行补偿是有必要的。 本仿真通过增加LuGre摩擦力模型,模拟摩擦力对系统性能的影响。 通过扰动观测器对摩擦力进行观测并进行补偿,降低摩擦力对系统性能的影响。 3.仿真效果 ① 加入摩擦力,速度给定为正弦波,模拟速度反复过零的情况。 由于摩擦力的存在,实际速度过零时不能很好的跟踪速度给定信号,如图1所示,0.6s前没有使用扰动观测器,速度过零时,速度跟踪误差很大。 0.6s后,开启扰动观测器,速度跟踪误差明显减小。 ② 图2为电流环响应波形,可见电流环跟踪很好。 ③ 图3为LuGre摩擦力模型输出的摩擦转矩波形和扰动观测器输出的扰动转矩观测波形。 其中,0.6s后才开启扰动观测器。 可见观测的扰动转矩与摩擦转矩基本重合。 4. 可提供模型内相关算法的参考文献,避免大 量阅读文献浪费时间。 【注】 模型已搭建完毕,原则上不会做任何修改。
摩擦这玩意儿在伺服系统里就像鞋底沾了口香糖,尤其速度过零时能让跟踪性能直接劈叉。咱今天要聊的这个仿真模型,直接在Matlab里把LuGre摩擦模型和扰动观测器给玩明白了,关键代码还都是拿Matlab Function写的,移植起来跟C语言差不多顺手。
先看抗饱和PI控制器的核心代码,这货可比普通PI有意思多了:
function u = anti_sat_PI(e, Kp, Ki, Ts, u_max)
persistent integral;
if isempty(integral)
integral = 0;
end
% 抗饱和处理
if (integral * Ki > u_max)
integral = u_max / Ki;
elseif (integral * Ki < -u_max)
integral = -u_max / Ki;
end
integral = integral + e * Ts;
u = Kp * e + Ki * integral;
end重点在积分项的动态限幅——这操作相当于给积分器装了弹簧缓冲器。当积分量要冲出输出限幅时,直接手动把积分值按在安全区,比传统的外部钳位更聪明,避免了积分饱和带来的滞后效应。
摩擦力的戏精表现靠LuGre模型撑场子。来看这个非线性状态方程的代码实现:
function tau_f = LuGre(v, z0)
persistent z;
if isempty(z)
z = z0;
end
sigma0 = 1.2; % 刚度系数
sigma1 = 0.8; % 阻尼系数
sigma2 = 0.015; % 粘性摩擦系数
Ts = 0.0001; % 离散化步长
% 非线性状态更新
dz = v - abs(v)/(0.01 + 0.02*exp(-(v/0.005)^2)) * z;
z = z + dz * Ts;
tau_f = sigma0*z + sigma1*dz + sigma2*v;
end这个微分方程里的exp项处理速度非线性变化简直绝了。离散化时用了前向欧拉法,虽然简单但足够应付实时系统。注意z的初始化需要给初始状态,这在实际移植时得注意从传感器获取初始位置。
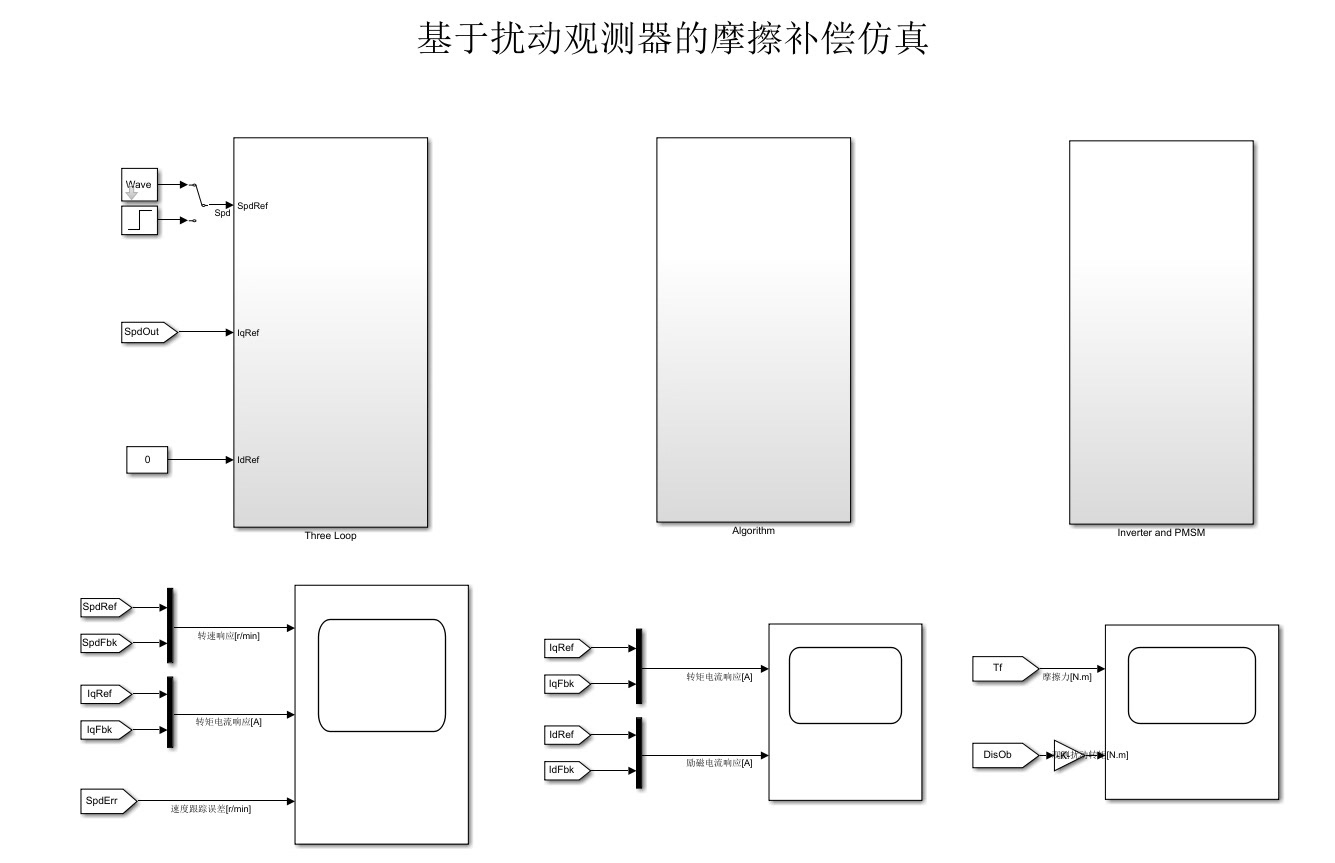
基于扰动观测器的伺服系统摩擦补偿Matlab仿真 1.模型简介 模型为基于扰动观测器的摩擦补偿仿真,仿真基于永磁同步电机速度、电流双闭环控制结构开发,双环均采用PI控制,PI参数已经调好。 仿真中主要包含抗饱和PI控制器、摩擦力模型、扰动观测器、坐标变换、SVPWM、逆变器和永磁同步电机模块等,其中抗饱和PI控制器、摩擦力模型、扰动观测器、坐标变换、SVPWM模块均采用matlab function编程实现,其与C语言编程较为相似,容易进行实物移植。 模型均采用离散化仿真,其效果更接近实际数字控制系统。 2.算法简介 伺服系统中,由于摩擦力的存在,会降低系统响应,因此对摩擦力进行补偿是有必要的。 本仿真通过增加LuGre摩擦力模型,模拟摩擦力对系统性能的影响。 通过扰动观测器对摩擦力进行观测并进行补偿,降低摩擦力对系统性能的影响。 3.仿真效果 ① 加入摩擦力,速度给定为正弦波,模拟速度反复过零的情况。 由于摩擦力的存在,实际速度过零时不能很好的跟踪速度给定信号,如图1所示,0.6s前没有使用扰动观测器,速度过零时,速度跟踪误差很大。 0.6s后,开启扰动观测器,速度跟踪误差明显减小。 ② 图2为电流环响应波形,可见电流环跟踪很好。 ③ 图3为LuGre摩擦力模型输出的摩擦转矩波形和扰动观测器输出的扰动转矩观测波形。 其中,0.6s后才开启扰动观测器。 可见观测的扰动转矩与摩擦转矩基本重合。 4. 可提供模型内相关算法的参考文献,避免大 量阅读文献浪费时间。 【注】 模型已搭建完毕,原则上不会做任何修改。
扰动观测器才是本仿真的C位选手,它的实现比想象中简单:
function tau_est = DOB(q, tau_cmd, Ts)
persistent tau_hat;
if isempty(tau_hat)
tau_hat = 0;
end
g = 500; % 观测器带宽
J = 0.02; % 转动惯量
dtau = g/J * (tau_cmd - tau_hat) - g*q;
tau_hat = tau_hat + dtau * Ts;
tau_est = tau_hat;
end这算法相当于给系统装了个摩擦力量体秤。带宽参数g调大了响应快但容易震荡,仿真里取500是个经验值。注意这里的q其实是加速度观测值,实际工程中得用加速度计或者速度差分计算。
仿真结果那叫一个刺激:速度过零点原本像卡了帧似的,0.6秒观测器一开直接丝滑如德芙。电流环波形稳得就像老司机的方向盘,最秀的是摩擦转矩估计曲线和真实值基本重合,误差小到可以忽略不计。
想深究算法细节的兄弟可以直接找作者要参考文献,省得在知网里大海捞针。整个模型都是离散化的,采样率设成10kHz和实际DSP控制完全对得上,真要往实物上移植的话,基本上就是把这些Matlab Function翻译成C代码的事。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐



 10
10 0
0- 0



 已为社区贡献34条内容
已为社区贡献34条内容

所有评论(0)