基于EKF扩展卡尔曼滤波算法的永磁同步电机PMSM无传感器矢量控制Simulink仿真模型探索
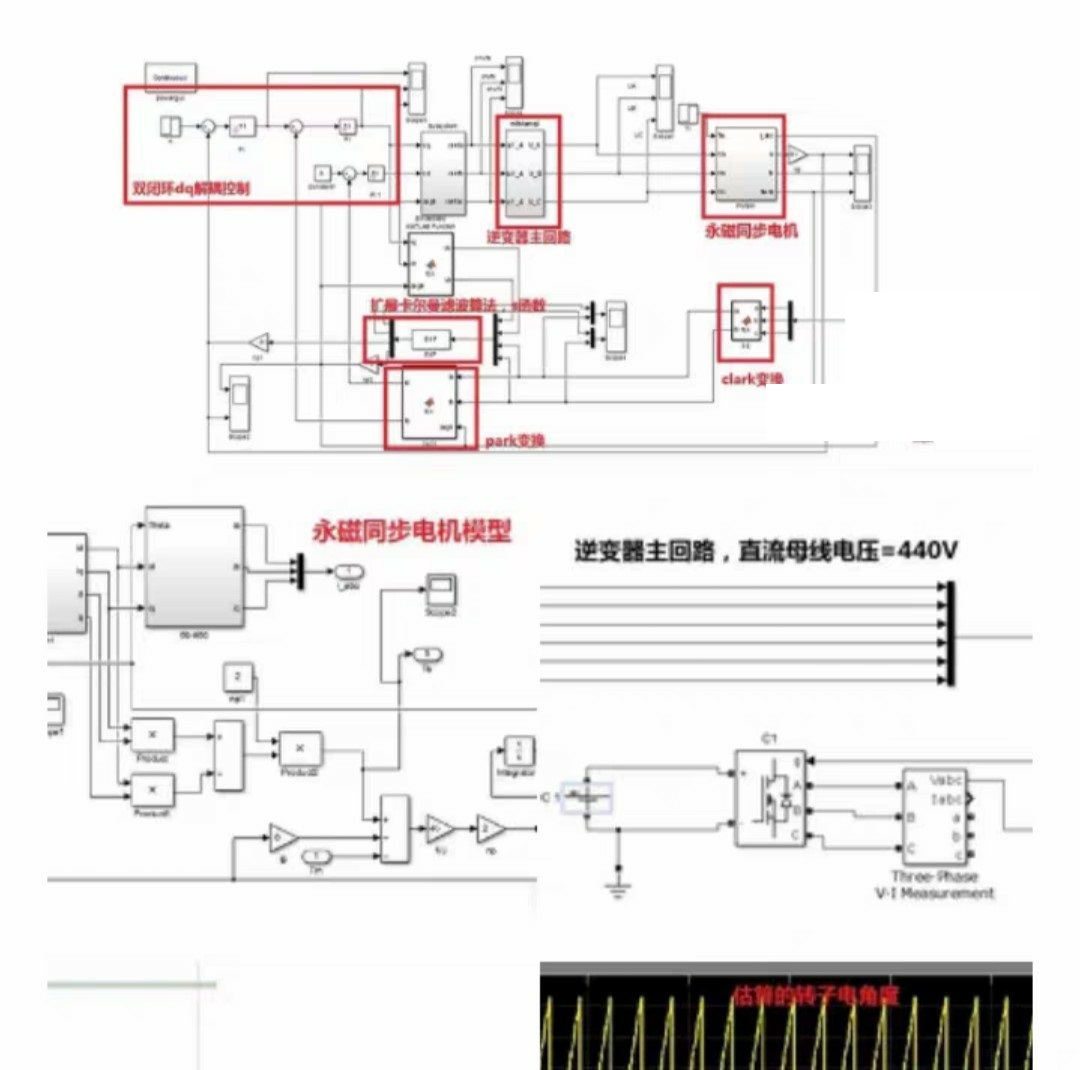
基于EKF扩展卡尔曼滤波算法的永磁同步电机PMSM无传感器矢量控制Simulink仿真模型。 1.依据PMSM的数学模型搭建电机模型 2.双闭环dq解耦控制,转速外环,转矩内环 3. EKF算法对电机的转子电角度和机械转速进行估算
在电机控制领域,永磁同步电机(PMSM)因其高效、节能等优点被广泛应用。而基于扩展卡尔曼滤波(EKF)算法的无传感器矢量控制技术,更是为PMSM的精准控制提供了新的思路。今天咱们就来唠唠基于EKF扩展卡尔曼滤波算法的永磁同步电机PMSM无传感器矢量控制Simulink仿真模型的搭建。
一、依据PMSM的数学模型搭建电机模型
PMSM的数学模型是整个控制策略的基础。在三相静止坐标系下,PMSM的电压方程可以表示为:
\[ \begin{cases}
u{a}=R{s}i{a}+p\psi{a} \\
u{b}=R{s}i{b}+p\psi{b} \\
u{c}=R{s}i{c}+p\psi{c}
\end{cases} \]
其中,\(u{a}, u{b}, u{c}\)是三相定子电压,\(i{a}, i{b}, i{c}\)是三相定子电流,\(R{s}\)是定子电阻,\(p\)是微分算子,\(\psi{a}, \psi{b}, \psi{c}\)是三相定子磁链。
在Simulink中搭建电机模型时,我们可以利用这些方程构建模块。比如使用“Integrator”模块来实现微分运算,“Gain”模块设置电阻参数等。通过这种方式,将数学模型转化为直观的Simulink模型。
二、双闭环dq解耦控制,转速外环,转矩内环
双闭环dq解耦控制是实现PMSM高性能控制的关键技术。转速外环负责调节电机的转速,使其跟踪给定转速。转矩内环则快速响应转速外环的输出,控制电机的电磁转矩。
在Matlab代码中,转速外环的PI控制器可以这样实现:
Kp_speed = 0.5;
Ki_speed = 0.1;
e_speed = w_ref - w; % w_ref是给定转速,w是实际转速
i_speed_integral = i_speed_integral + e_speed * Ts; % Ts是采样时间
i_d_ref = Kp_speed * e_speed + Ki_speed * i_speed_integral;这里通过比例积分控制,将转速误差转化为转矩内环的给定电流\(i_d\)。
基于EKF扩展卡尔曼滤波算法的永磁同步电机PMSM无传感器矢量控制Simulink仿真模型。 1.依据PMSM的数学模型搭建电机模型 2.双闭环dq解耦控制,转速外环,转矩内环 3. EKF算法对电机的转子电角度和机械转速进行估算
转矩内环同样采用PI控制,以调节定子电流。代码如下:
Kp_torque = 1;
Ki_torque = 0.5;
e_i_d = i_d_ref - i_d;
i_d_control = Kp_torque * e_i_d + Ki_torque * integral_i_d;这样通过双闭环控制,就实现了对电机转速和转矩的精确控制。在Simulink中,可以使用“PI Controller”模块轻松搭建这两个闭环控制结构。
三、EKF算法对电机的转子电角度和机械转速进行估算
EKF算法能够利用电机的电压、电流等可测量信号,对不可直接测量的转子电角度和机械转速进行估算。EKF的核心步骤包括预测和更新。
预测步骤中,状态预测方程为:
\[ \hat{x}{k|k - 1}=f(\hat{x}{k - 1|k - 1}, u_{k - 1}) \]
这里\(\hat{x}{k|k - 1}\)是\(k\)时刻基于\(k - 1\)时刻估计值的预测状态,\(f\)是状态转移函数,\(u{k - 1}\)是\(k - 1\)时刻的输入。
更新步骤中,卡尔曼增益计算为:
\[ K{k}=P{k|k - 1}H{k}^{T}(H{k}P{k|k - 1}H{k}^{T}+R_{k})^{-1} \]
其中\(P{k|k - 1}\)是预测误差协方差,\(H{k}\)是观测矩阵,\(R_{k}\)是观测噪声协方差。
在代码实现上,大致框架如下:
% 初始化
x_hat = zeros(4, 1); % 状态估计值
P = eye(4); % 误差协方差矩阵
Q = [0.01 0 0 0; 0 0.01 0 0; 0 0 0.01 0; 0 0 0 0.01]; % 过程噪声协方差
R = [0.1 0; 0 0.1]; % 观测噪声协方差
% 迭代过程
for k = 2:length(u)
% 预测
x_hat_minus = f(x_hat, u(k - 1));
P_minus = A * P * A' + Q;
% 更新
K = P_minus * H' / (H * P_minus * H' + R);
y = [i_a(k); i_b(k)]; % 观测值
x_hat = x_hat_minus + K * (y - h(x_hat_minus));
P = (eye(4) - K * H) * P_minus;
end这里通过不断迭代,利用EKF算法对转子电角度和机械转速进行准确估算,为无传感器矢量控制提供关键信息。
通过以上步骤,我们就完成了基于EKF扩展卡尔曼滤波算法的永磁同步电机PMSM无传感器矢量控制Simulink仿真模型的搭建。这不仅有助于我们深入理解电机控制原理,也为实际应用提供了有力的仿真验证手段。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐

 2
2 0
0- 0



 已为社区贡献22条内容
已为社区贡献22条内容

所有评论(0)