表贴式永磁同步电机一阶线性/非线性自抗扰(ADRC)Matlab/Simulink 模型探索
表贴式永磁同步电机一阶线性/非线性自抗扰(ADRC)matlab/simulink模型。 ESO,扩张状态观测器。 模型,带参考资料,文献。
最近在研究表贴式永磁同步电机(SPMSM)的控制策略,一阶线性/非线性自抗扰控制(ADRC)引起了我的极大兴趣,今天就来和大家分享一下相关的 Matlab/Simulink 模型构建。
一、自抗扰控制(ADRC)基础
自抗扰控制的核心思想是将系统的未知动态和外部扰动“扩张”为系统的状态,然后利用扩张状态观测器(ESO)对这些状态进行实时估计,并在控制律中给予补偿,从而实现对系统的高性能控制。
ESO,也就是扩张状态观测器,在 ADRC 中起着关键作用。它能够实时估计系统的状态以及总扰动,使得控制器可以对未知扰动进行有效补偿。
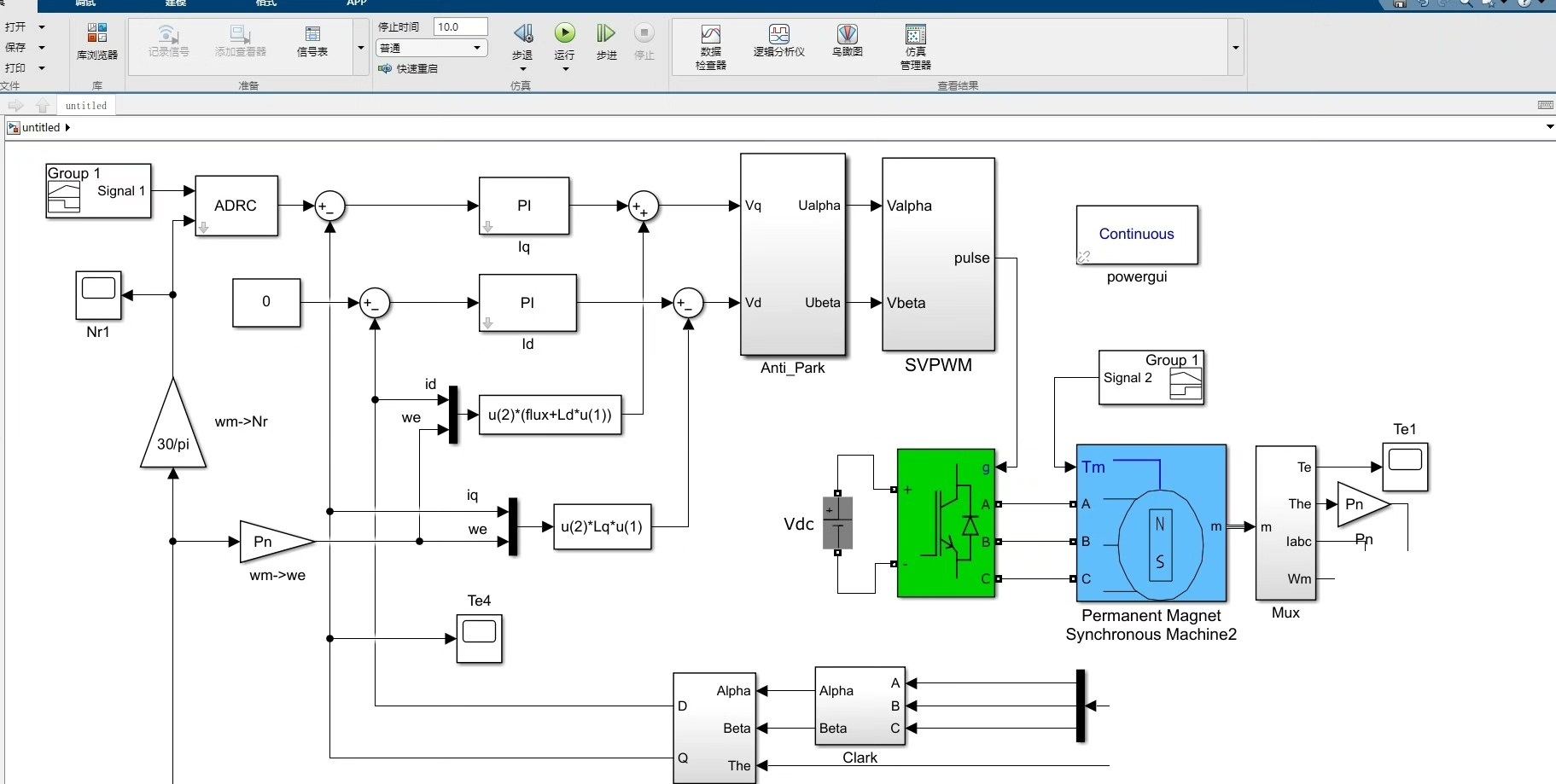
二、Matlab/Simulink 模型搭建
(一)电机模型部分
首先,在 Simulink 中搭建表贴式永磁同步电机的模型。一般我们会基于电机的数学模型来构建,其电压方程在 d - q 坐标系下为:
\[
\begin{cases}
ud = Rsid + Ld\frac{did}{dt} - \omegaeLqiq \\
uq = Rsiq + Lq\frac{diq}{dt} + \omegae(Ldid + \psi_f)
\end{cases}
\]
这里 \( ud, uq \) 是 d - q 轴电压,\( id, iq \) 是 d - q 轴电流,\( Rs \) 是定子电阻,\( Ld, Lq \) 是 d - q 轴电感,\( \omegae \) 是电角速度,\( \psi_f \) 是永磁体磁链。
在 Simulink 中,可以使用“Simscape Electrical”库中的相关模块来搭建电机的电气部分。例如,使用“Permanent Magnet Synchronous Machine”模块来表示电机本体,通过设置相应的参数,如定子电阻、电感、永磁体磁链等,来准确模拟电机特性。
(二)ADRC 控制器部分
- ESO 的实现
以一阶线性 ESO 为例,其离散化的方程可以表示为:
\[
\begin{cases}
表贴式永磁同步电机一阶线性/非线性自抗扰(ADRC)matlab/simulink模型。 ESO,扩张状态观测器。 模型,带参考资料,文献。
e(k) = z_1(k) - y(k) \\
z1(k + 1) = z1(k) + h(z2(k) - \beta1e(k)) \\
z2(k + 1) = z2(k) - h\beta_2e(k)
\end{cases}
\]
这里 \( e(k) \) 是观测误差,\( z1(k), z2(k) \) 是 ESO 的状态变量,\( y(k) \) 是系统输出,\( h \) 是采样时间,\( \beta1, \beta2 \) 是观测器增益。
在 Simulink 中,可以通过使用“Integrator”模块、“Gain”模块以及“Sum”模块等来实现上述方程。以下是简单的代码片段来实现这个一阶线性 ESO(这里用伪代码表示,实际在 Simulink 中以模块连接方式实现):
% 假设已经定义了相关参数和变量
h = 0.001; % 采样时间
beta1 = 100;
beta2 = 1000;
z1 = 0;
z2 = 0;
for k = 1:N % N 为总的采样次数
e = z1 - y(k);
z1 = z1 + h * (z2 - beta1 * e);
z2 = z2 - h * beta2 * e;
% 这里 z1, z2 即为估计的状态和扰动,后续可用于控制律计算
end- 控制律计算
基于 ESO 估计的状态和扰动,计算控制律。以简单的比例 - 积分(PI)型控制律为例,结合 ESO 估计的扰动补偿:
\[
u(k) = kp(e1(k) - z2(k)) + ki\sum{j = 1}^{k}e1(j)
\]
这里 \( kp, ki \) 是 PI 控制器参数,\( e_1(k) \) 是系统给定值与输出的误差。同样,在 Simulink 中通过相应模块搭建这个控制律计算部分。
三、参考资料与文献
在构建这个模型的过程中,参考了不少优秀的资料。例如 Han Jingqing 教授发表的一系列关于自抗扰控制的论文,详细阐述了 ADRC 的理论基础和设计方法。具体如《自抗扰控制技术——估计补偿不确定因素的控制技术》这篇文章,对理解 ADRC 的原理和应用有很大帮助。
另外,一些关于永磁同步电机控制的经典书籍,如《永磁同步电机调速系统——原理、设计与应用》,在电机模型构建和控制策略选择方面提供了丰富的知识。
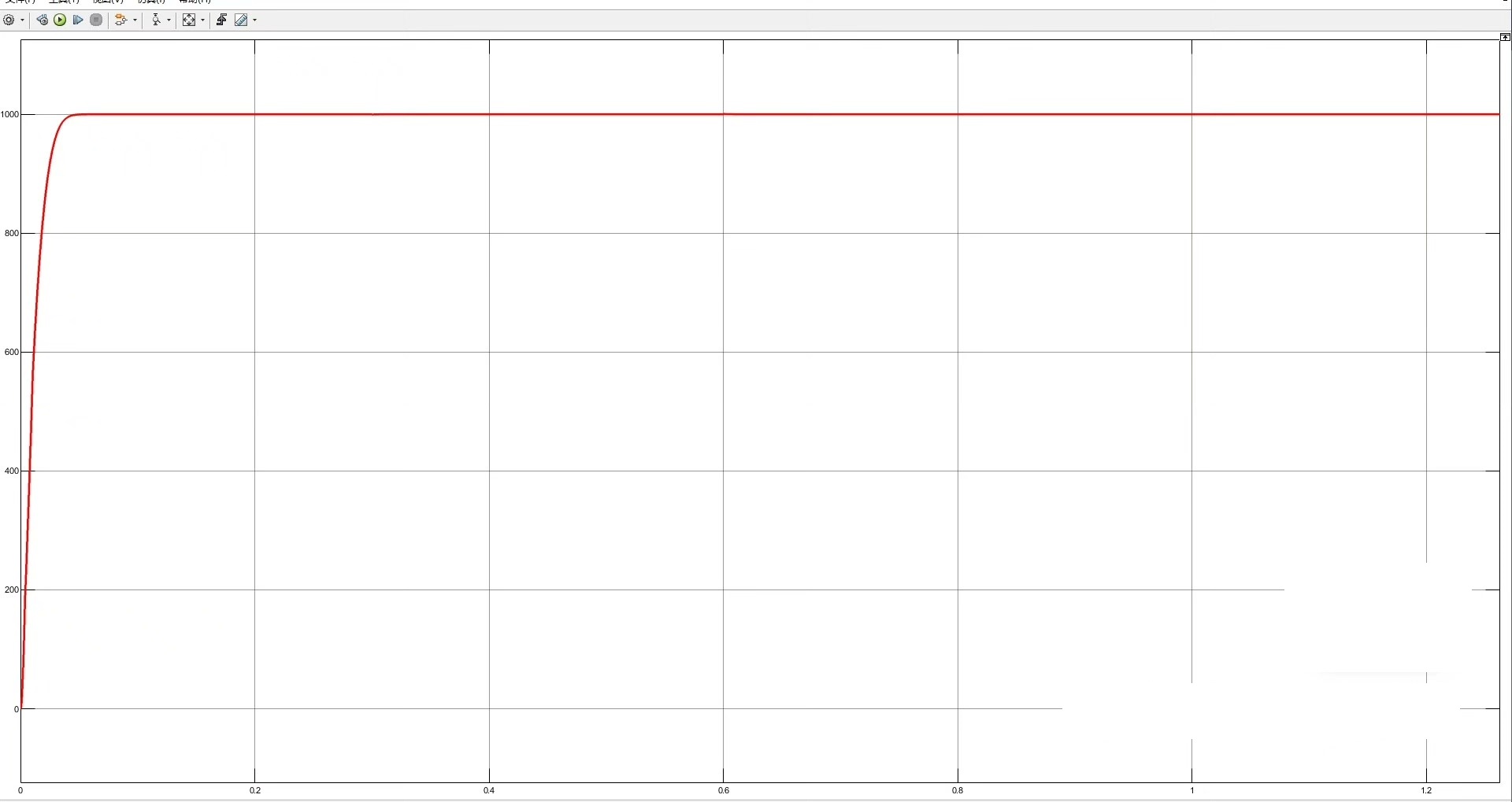
总之,通过搭建表贴式永磁同步电机一阶线性/非线性自抗扰的 Matlab/Simulink 模型,我们可以深入研究 ADRC 在电机控制中的性能表现,为实际应用提供理论支持和仿真验证。希望大家也能在这个有趣的领域中有所收获。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐

 17
17 0
0- 0



 已为社区贡献29条内容
已为社区贡献29条内容

所有评论(0)