探索 EPB 电子驻车制动系统 Simulink 模型
EPB电子驻车制动系统Simulink模型(参考VDA305_100标准进行模型搭建) 版本:matlab2018a,可生成低版本 模型包括:有刷直流电机+执行器模型,word说明文档,电机参数m文件,SSM模块,PBC模块,数据处理模块,与trucksim联合仿真进行过验证。 模型可实现功能:常规夹紧与释放,溜车再夹与自动释放,动态减速。 其他功能也可基于模型继续开发。
最近捣鼓了个 EPB 电子驻车制动系统的 Simulink 模型,跟大伙分享分享。这个模型可是严格参考 VDA305_100 标准搭建的,用的是 matlab2018a 版本,不过好消息是它还能生成低版本,兼容性杠杠的。
模型组件大揭秘
- 有刷直流电机 + 执行器模型
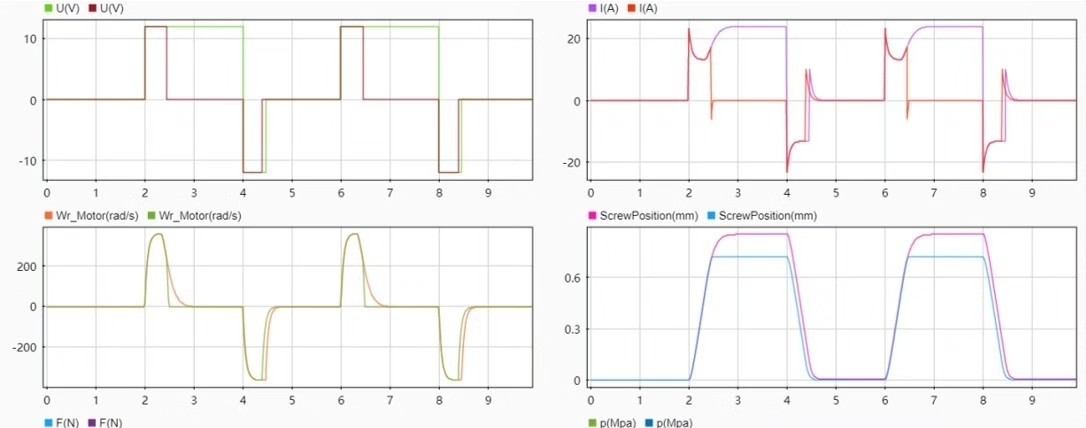
- 这部分是模型的关键动力输出环节。在 Simulink 里搭建有刷直流电机模型时,要考虑电机的电气和机械特性。比如,电机的电压平衡方程:$V = RaIa + La\frac{dIa}{dt} + Eb$,其中$V$是施加的电压,$Ra$是电枢电阻,$Ia$是电枢电流,$La$是电枢电感,$E_b$是反电动势。在 Simulink 里可以通过一系列模块来实现这个方程。
- 简单的代码示例(伪代码):
% 设定电机参数
Ra = 0.5; % 电枢电阻
La = 0.01; % 电枢电感
Kb = 0.05; % 反电动势常数
% 模拟时间
tspan = 0:0.01:10;
% 初始条件
x0 = [0;0]; % 电流和速度初始值
% 定义微分方程
odefun = @(t,x) [(1/La)*(u - Ra*x(1) - Kb*x(2)); (1/J)*(Kt*x(1) - B*x(2) - T_load)];
[t,x] = ode45(odefun,tspan,x0);- 上述代码大概模拟了电机电流和速度随时间的变化,实际在 Simulink 模型中,会通过专门的模块来实现类似功能,像 Integrator 模块来处理微分环节等。执行器模型则根据电机的输出进行相应的动作,比如控制刹车片的夹紧与松开。
- word 说明文档
这可太重要了,它详细记录了模型的搭建思路、各个模块的功能、参数设置依据以及如何使用模型等内容。就好比模型的使用指南,无论是自己后续回顾,还是给别人介绍模型,都离不开它。
- 电机参数 m 文件
这个文件里存放着电机的各种关键参数,像前面提到的电枢电阻、电感、反电动势常数等。有了这个文件,修改电机参数就变得很方便。比如,如果要测试不同电机特性对整个 EPB 系统的影响,直接在 m 文件里改参数就行,不用在模型里到处找参数设置的地方。
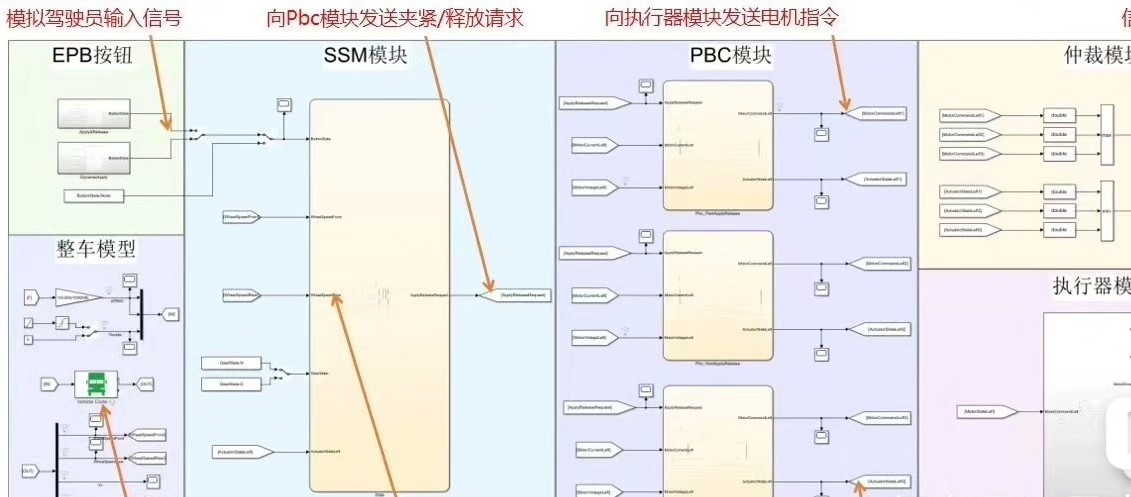
- SSM 模块、PBC 模块、数据处理模块
- SSM 模块(可能是状态机模块,具体看实际模型定义):它负责管理 EPB 系统的不同工作状态,比如驻车、行车等状态之间的切换。通过设定不同的条件,让系统在各个状态间有序转换。
- PBC 模块(推测可能是与驻车制动控制相关模块):主要处理驻车制动的具体控制逻辑,接收来自其他模块的信号,然后决定是否要夹紧或释放制动。
- 数据处理模块:收集和处理模型运行过程中的各种数据,比如电机的电流、速度,制动压力等数据。这些数据对于分析模型性能、优化模型非常关键。在数据处理模块里,可以用一些简单的滤波算法来处理噪声数据。例如简单的移动平均滤波代码:
function filtered_data = moving_average(data, window_size)
len = length(data);
filtered_data = zeros(size(data));
for i = 1:len
start_idx = max(1, i - floor(window_size/2));
end_idx = min(len, i + floor(window_size/2));
filtered_data(i) = mean(data(start_idx:end_idx));
end
end- 这段代码通过取一定窗口内数据的平均值来平滑数据,减少噪声干扰。
模型强大功能展示
- 常规夹紧与释放
这是 EPB 系统最基本的功能啦。当车辆需要驻车时,模型接收到驻车信号,通过一系列模块协作,控制有刷直流电机转动,带动执行器夹紧刹车片,实现驻车。释放时则相反,电机反转,执行器松开刹车片。
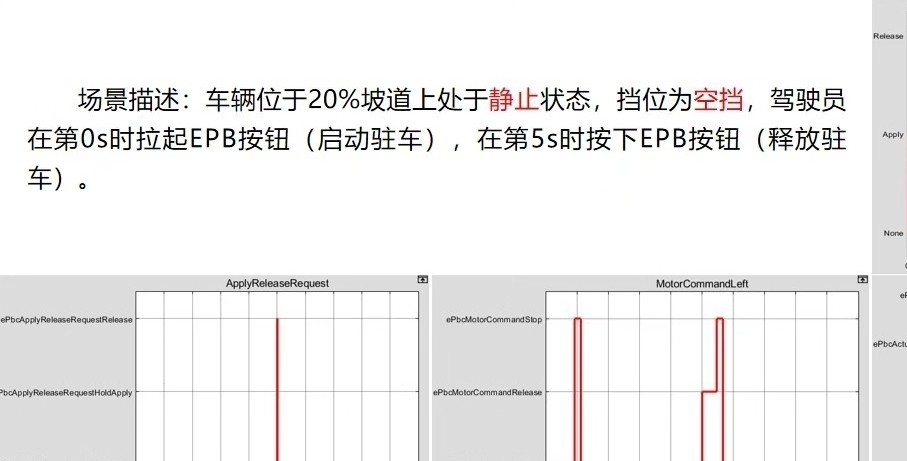
- 溜车再夹与自动释放
车辆在斜坡上如果出现溜车情况,模型能迅速检测到,然后触发再次夹紧动作,保证车辆安全。而自动释放功能则是当满足一定条件,比如车辆启动且驾驶员系好安全带等,EPB 系统自动释放驻车制动,方便车辆行驶。实现这些功能需要各个模块间精确的信号传递和逻辑判断。
- 动态减速
在车辆行驶过程中,如果需要减速,EPB 系统可以辅助制动,通过控制电机和执行器实现一定程度的减速。这一功能可以与车辆的其他制动系统协同工作,提高制动效果。
拓展开发潜力无限
这个模型的好处就是,基于现有的架构,其他功能也能轻松开发。比如,可以增加故障诊断功能,检测电机是否故障、传感器信号是否异常等。或者开发更智能的驻车辅助功能,根据不同的路况和车辆状态,自动调整驻车制动的力度。
EPB电子驻车制动系统Simulink模型(参考VDA305_100标准进行模型搭建) 版本:matlab2018a,可生成低版本 模型包括:有刷直流电机+执行器模型,word说明文档,电机参数m文件,SSM模块,PBC模块,数据处理模块,与trucksim联合仿真进行过验证。 模型可实现功能:常规夹紧与释放,溜车再夹与自动释放,动态减速。 其他功能也可基于模型继续开发。
总之,这个 EPB 电子驻车制动系统 Simulink 模型不仅能满足基本的功能需求,还有很大的拓展空间,希望能给做相关研究或开发的小伙伴们一些启发。


AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐

 12
12 0
0- 0



 已为社区贡献9条内容
已为社区贡献9条内容

所有评论(0)