基于模糊PID控制的无刷直流电机矢量控制系统(BLDC)Matlab仿真探索
基于模糊pid控制的无刷直流电机矢量控制系统(bldc) matlab仿真模型 转速、转矩波形如图
在电机控制领域,无刷直流电机(BLDC)因其高效、可靠等优点被广泛应用。而矢量控制技术为精确控制BLDC的转速和转矩提供了有效手段。今天,咱们来聊聊基于模糊PID控制的BLDC矢量控制系统以及对应的Matlab仿真模型。
模糊PID控制的魅力
传统的PID控制依赖于精确的系统模型参数,但实际中的BLDC电机运行环境复杂多变,参数会发生波动。模糊PID控制就像是给PID控制装上了一个智能“大脑”,它不依赖精确的数学模型,而是根据专家经验制定模糊规则,能够自适应地调整PID的三个参数(Kp、Ki、Kd)。
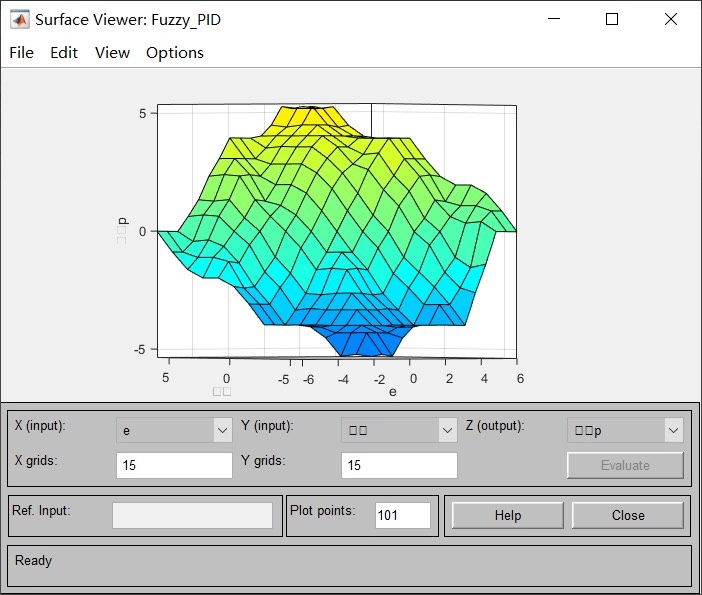
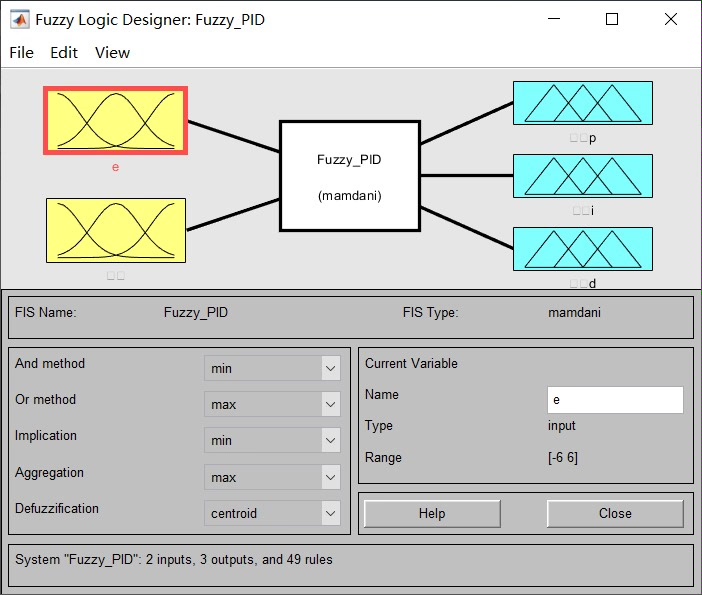
比如,在Matlab中实现模糊PID控制,我们可以这样搭建模糊逻辑控制器:
% 创建一个模糊推理系统
fisMat = newfis('fuzzy_PID');
% 定义输入变量(这里以转速误差和误差变化率为例)
fisMat = addvar(fisMat,'input','e',[-6 6]);
fisMat = addmf(fisMat,'input',1,'NB','zmf',[-6 -3]);
fisMat = addmf(fisMat,'input',1,'NM','trimf',[-6 -3 0]);
% 继续添加其他隶属度函数...
fisMat = addvar(fisMat,'input','de',[-6 6]);
fisMat = addmf(fisMat,'input',2,'NB','zmf',[-6 -3]);
fisMat = addmf(fisMat,'input',2,'NM','trimf',[-6 -3 0]);
% 继续添加其他隶属度函数...
% 定义输出变量(Kp、Ki、Kd的调整量)
fisMat = addvar(fisMat,'output','dKp',[-3 3]);
fisMat = addmf(fisMat,'output',1,'NB','zmf',[-3 -1.5]);
fisMat = addmf(fisMat,'output',1,'NM','trimf',[-3 -1.5 0]);
% 继续添加其他隶属度函数...
fisMat = addvar(fisMat,'output','dKi',[-0.6 0.6]);
fisMat = addvar(fisMat,'output','dKd',[-3 3]);
% 同样添加dKi和dKd的隶属度函数
% 编写模糊规则
rulelist = [1 1 1 1 1;
1 2 2 2 1;
% 继续添加更多规则,这里只是示例
];
fisMat = addrule(fisMat,rulelist);这段代码创建了一个模糊推理系统(FIS),定义了输入变量(转速误差 e 和误差变化率 de)、输出变量(dKp、dKi、dKd),并给它们分别设置了隶属度函数。最后通过 addrule 函数添加了模糊规则。这些规则就像是模糊PID控制的“行事准则”,根据输入变量的不同模糊状态来调整输出的PID参数调整量。
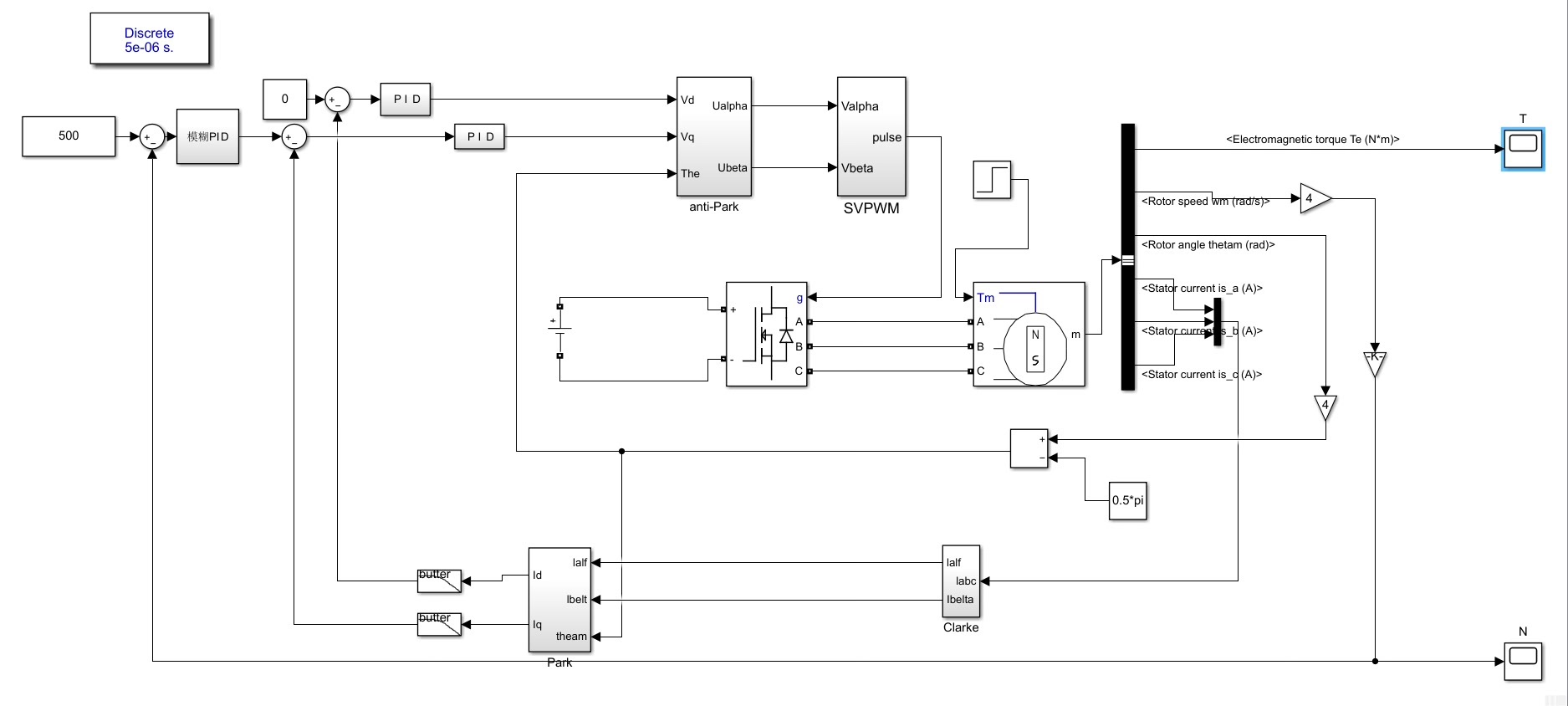
BLDC矢量控制系统架构
矢量控制系统的核心思想是将BLDC电机的三相电流通过坐标变换,等效成旋转坐标系下的直流电机模型,这样就可以像控制直流电机一样方便地控制BLDC的转矩和转速。
在Matlab/Simulink中搭建这个系统,一般包含以下几个主要模块:
- 电机模型模块:可以使用Simscape Electrical库中的BLDC电机模型,设置电机的基本参数,如额定功率、额定转速、定子电阻、电感等。
- 坐标变换模块:包括Clark变换和Park变换,将三相静止坐标系下的电流(ia, ib, ic)转换到旋转坐标系下的电流(id, iq)。
% Clark变换公式
function [alpha, beta] = clark_transform(ia, ib, ic)
alpha = ia;
beta = (sqrt(3)/3) * (ib - ic);
end
% Park变换公式
function [id, iq] = park_transform(alpha, beta, theta)
id = alpha * cos(theta) + beta * sin(theta);
iq = -alpha * sin(theta) + beta * cos(theta);
end这里简单给出Clark变换和Park变换的代码示意。Clark变换将三相电流转换为两相静止坐标系下的电流,Park变换则进一步将其转换到旋转坐标系下。theta 是转子位置角,它是进行Park变换的关键参数。
- 模糊PID控制器模块:前面创建的模糊逻辑控制器在这里发挥作用,根据转速误差和误差变化率实时调整PID参数,输出期望的
iq电流值。
- 电流环PI控制器模块:根据期望的
id(通常设为0,实现最大转矩/电流控制)和iq值与实际反馈的id、iq电流值的误差,通过PI控制输出电压分量vd和vq。
- 逆Park变换和逆Clark变换模块:将旋转坐标系下的电压分量
vd、vq转换回三相静止坐标系下的电压(va, vb, vc),用于驱动BLDC电机。
仿真结果分析
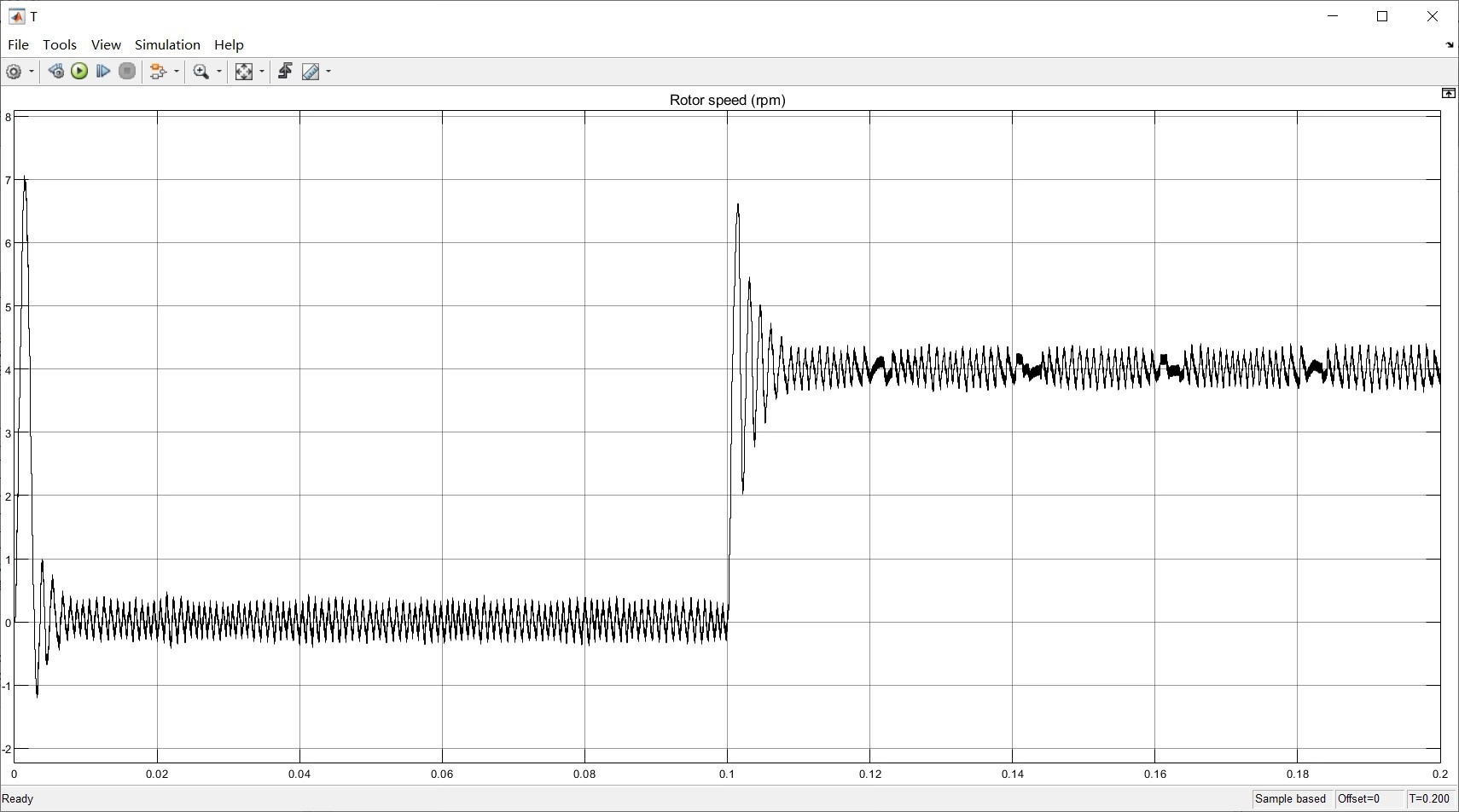
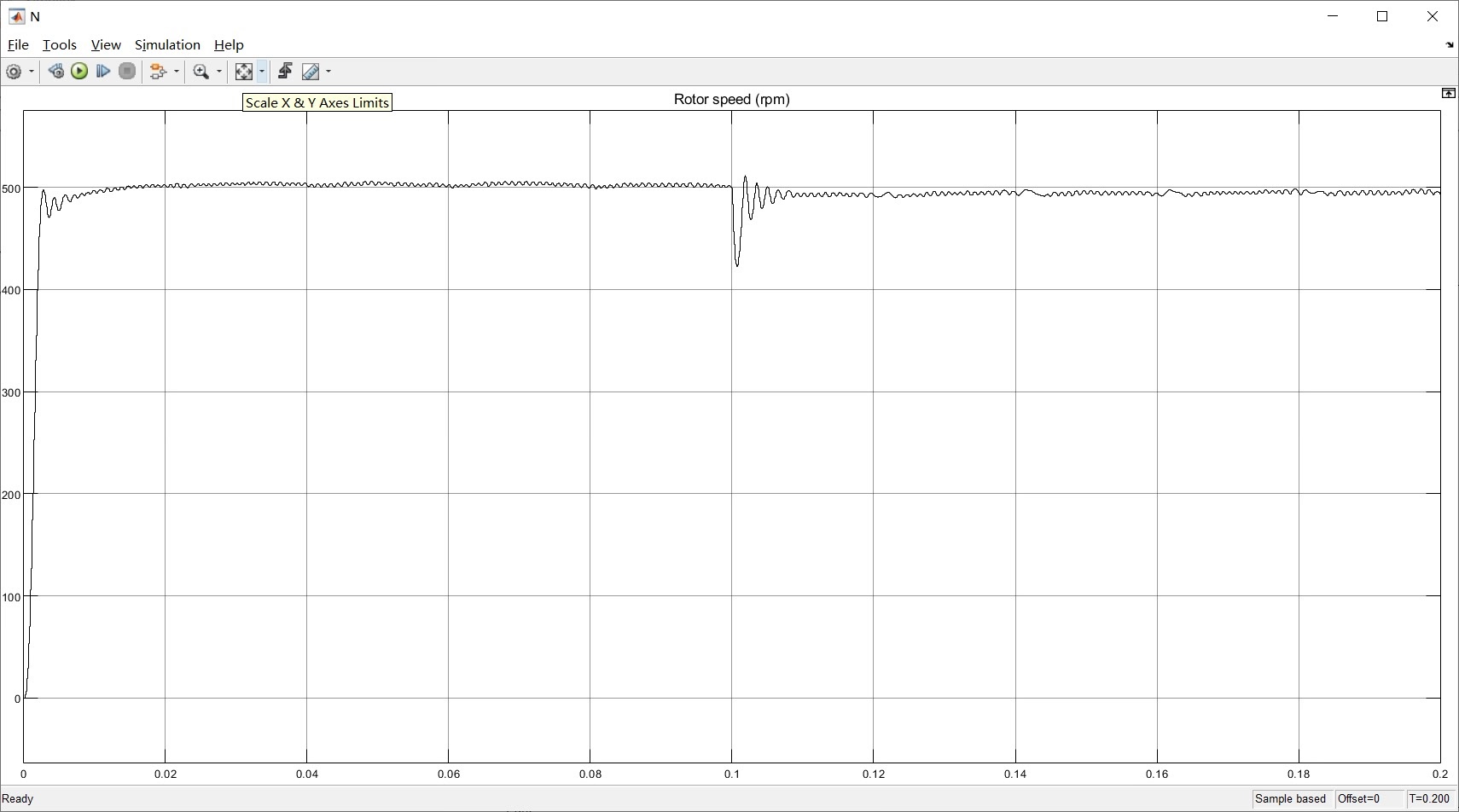
运行Matlab仿真模型后,我们得到了转速和转矩波形。从转速波形来看,如果系统在启动阶段能够快速达到设定转速,并且在负载变化等扰动情况下,转速能够迅速恢复稳定,这说明模糊PID控制起到了很好的自适应调节作用。
基于模糊pid控制的无刷直流电机矢量控制系统(bldc) matlab仿真模型 转速、转矩波形如图
例如,当突加负载时,转速波形会短暂下降,但由于模糊PID控制器能够快速调整 iq 电流,使得电机输出转矩增加,转速很快回升到设定值。
转矩波形也能反映出系统的性能。稳定运行时,转矩应该相对平稳,波动较小。如果转矩波动较大,可能意味着系统的控制参数还需要进一步优化,比如模糊规则的调整或者PI控制器参数的微调。
总之,基于模糊PID控制的BLDC矢量控制系统在Matlab仿真中展现出了良好的动态性能和自适应能力,为实际工程应用提供了有力的参考和借鉴。希望大家也能自己动手在Matlab中搭建这个模型,深入探索电机控制的奥秘。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐



 7
7 0
0- 0



 已为社区贡献28条内容
已为社区贡献28条内容

所有评论(0)