基于STM32的永磁同步电机控制:从原理图到代码实现
stm32 永磁同步电机pcb,原理图 利用stm32f4xx制作的pmsm 控制器电路原理图,pcb,还有pmsm simulink模型 以及simulink模型代码自动生成来设计电机控制算法资料

在电机控制领域,永磁同步电机(PMSM)因其高效、高功率密度等优点,被广泛应用于各种工业和民用场景。今天,咱们就来聊聊如何利用STM32F4xx系列芯片来设计一个PMSM控制器,这里会涉及到电路原理图、PCB设计,还有Simulink模型以及代码自动生成等内容。
电路原理图设计
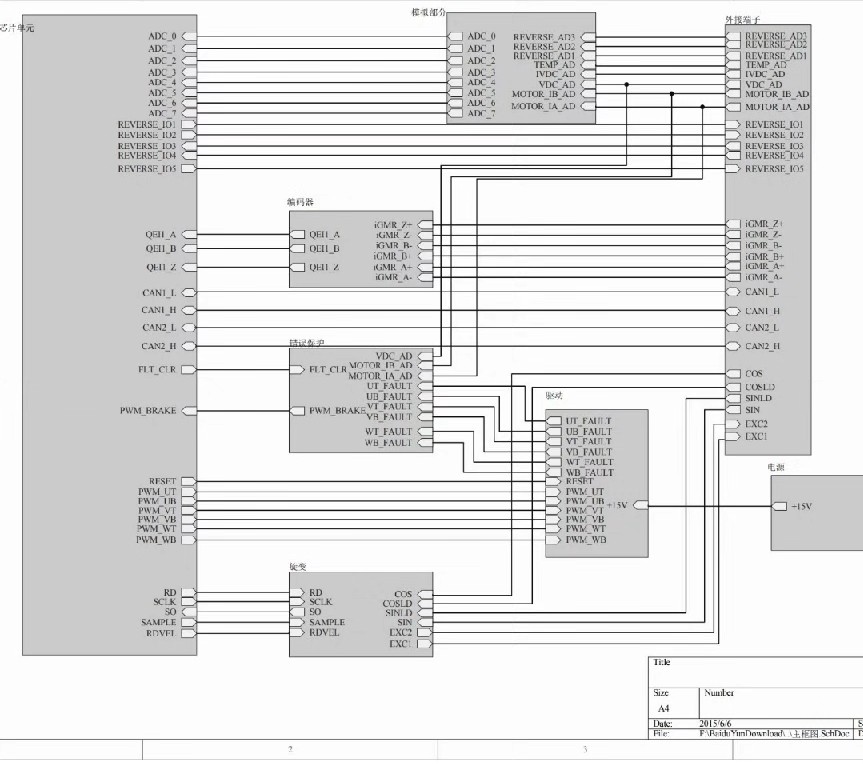
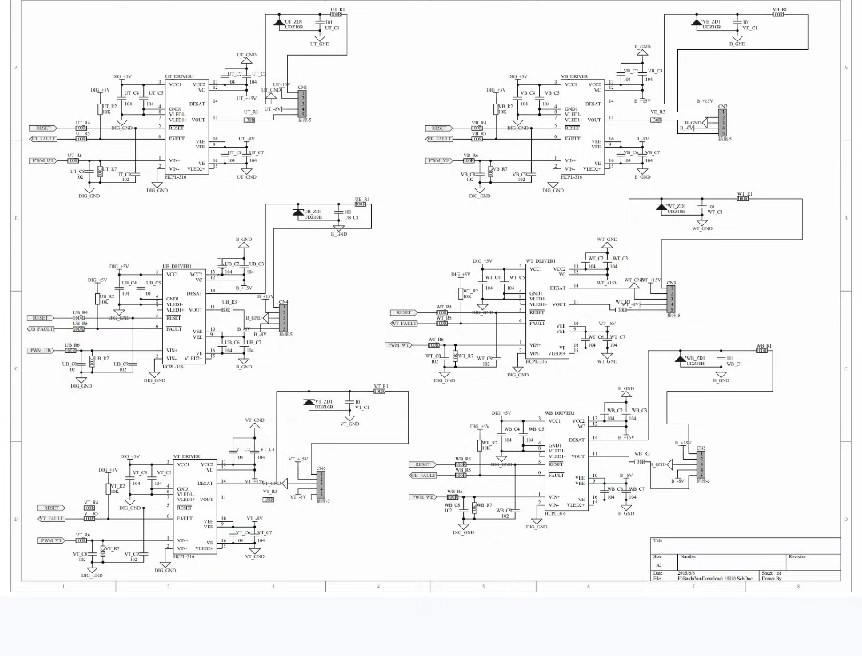
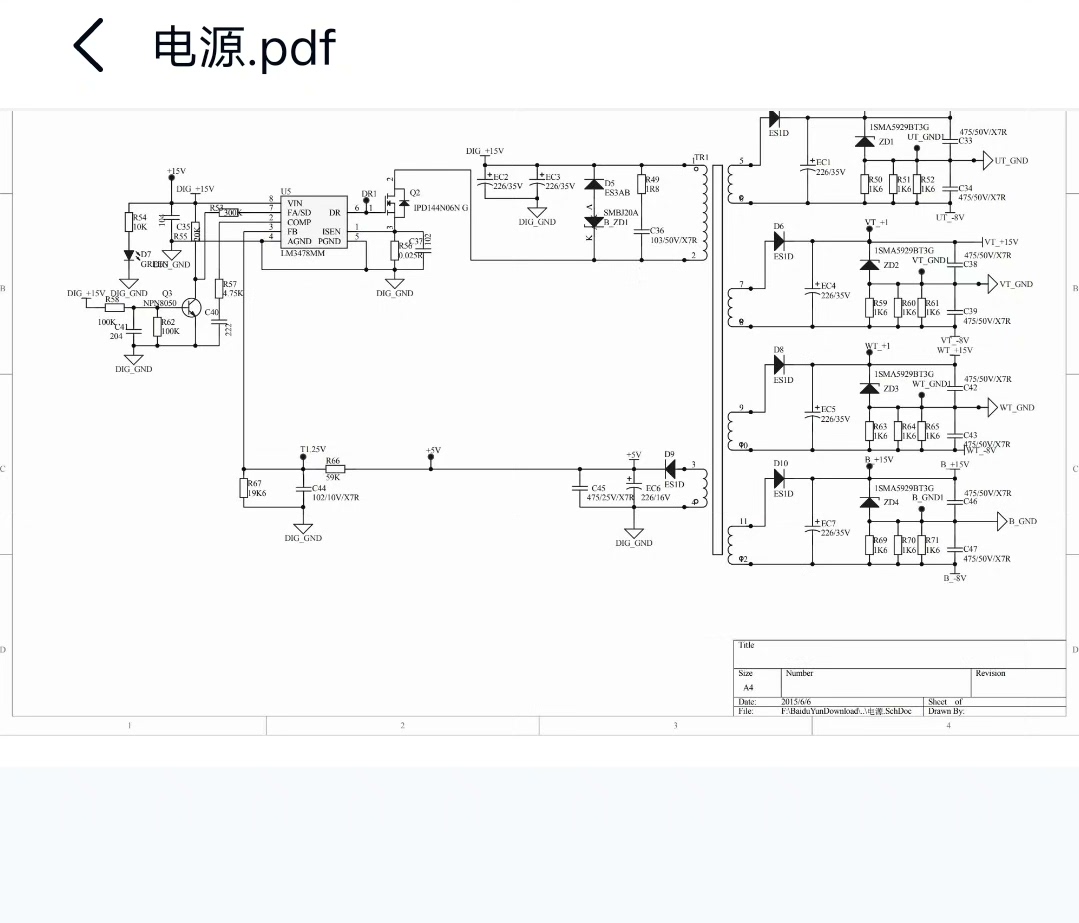
首先是电路原理图部分,这可是整个控制器的基础。使用STM32F4xx系列芯片作为主控,它强大的处理能力足以应对PMSM复杂的控制算法。下面是一个简单的STM32F4xx与PMSM驱动电路连接的原理图示例代码(这里用伪代码表示连接关系):
# 定义STM32F4xx引脚与PMSM驱动电路连接
STM32F4xx_PIN_PWM_A = 'PA0' # 用于控制A相的PWM引脚
STM32F4xx_PIN_PWM_B = 'PA1' # 用于控制B相的PWM引脚
STM32F4xx_PIN_PWM_C = 'PA2' # 用于控制C相的PWM引脚
STM32F4xx_PIN_HALL_A = 'PB0' # 用于读取A相霍尔传感器信号的引脚
STM32F4xx_PIN_HALL_B = 'PB1' # 用于读取B相霍尔传感器信号的引脚
STM32F4xx_PIN_HALL_C = 'PB2' # 用于读取C相霍尔传感器信号的引脚
# 连接关系模拟
print(f"将 {STM32F4xx_PIN_PWM_A} 连接到PMSM驱动电路的A相PWM输入")
print(f"将 {STM32F4xx_PIN_PWM_B} 连接到PMSM驱动电路的B相PWM输入")
print(f"将 {STM32F4xx_PIN_PWM_C} 连接到PMSM驱动电路的C相PWM输入")
print(f"将 {STM32F4xx_PIN_HALL_A} 连接到PMSM的A相霍尔传感器输出")
print(f"将 {STM32F4xx_PIN_HALL_B} 连接到PMSM的B相霍尔传感器输出")
print(f"将 {STM32F4xx_PIN_HALL_C} 连接到PMSM的C相霍尔传感器输出")代码分析:这里通过定义STM32F4xx的引脚与PMSM驱动电路和霍尔传感器的连接关系,模拟了实际的硬件连接。PWM引脚用于输出控制信号,驱动电机的三相绕组;霍尔传感器引脚用于读取电机的位置信息,以便实现精确的控制。在实际设计原理图时,需要根据芯片的数据手册和驱动电路的要求,合理选择引脚,并进行正确的电气连接。
PCB设计
有了原理图,接下来就是PCB设计了。PCB设计需要考虑很多因素,比如布线、电磁兼容性等。在设计过程中,要尽量减少信号干扰,保证电路的稳定性。可以使用专业的PCB设计软件,如Altium Designer。以下是一个简单的PCB布线原则的示例代码(同样是伪代码):
# 定义PCB布线原则
def pcb_layout_rules():
# 电源线和地线要尽量粗,减少电阻
power_line_width = 20 # 单位:mil
ground_line_width = 20 # 单位:mil
# 信号线之间要保持一定的间距,减少串扰
signal_line_spacing = 10 # 单位:mil
# 高速信号要进行阻抗匹配
high_speed_signal_impedance = 50 # 单位:欧姆
print(f"电源线宽度设置为 {power_line_width} mil")
print(f"地线宽度设置为 {ground_line_width} mil")
print(f"信号线间距设置为 {signal_line_spacing} mil")
print(f"高速信号阻抗匹配为 {high_speed_signal_impedance} 欧姆")
# 执行布线原则
pcb_layout_rules()代码分析:这段代码模拟了PCB布线的一些基本原则。电源线和地线加粗可以减少电阻,降低功耗和噪声;信号线保持一定间距可以减少串扰,提高信号质量;高速信号进行阻抗匹配可以保证信号的完整性。在实际设计中,要根据具体的电路要求和芯片特性,灵活调整这些参数。
Simulink模型设计与代码自动生成
Simulink是一个强大的仿真工具,可以方便地设计PMSM的控制算法模型。通过Simulink,可以直观地搭建控制模型,进行仿真验证,还能自动生成代码。以下是一个简单的PMSM速度控制Simulink模型的代码自动生成示例(这里以MATLAB代码形式展示):
% 创建Simulink模型
new_system('PMSM_Speed_Control_Model');
open_system('PMSM_Speed_Control_Model');
% 添加PMSM模块
add_block('simulink/Ports & Subsystems/Ground', 'PMSM_Speed_Control_Model/Ground');
add_block('simulink/Sources/Constant', 'PMSM_Speed_Control_Model/Ref_Speed');
add_block('simulink/Math Operations/Sum', 'PMSM_Speed_Control_Model/Speed_Error');
add_block('simulink/Continuous/PID Controller', 'PMSM_Speed_Control_Model/PID_Controller');
add_block('simulink/Sinks/Scope', 'PMSM_Speed_Control_Model/Speed_Scope');
% 连接模块
add_line('PMSM_Speed_Control_Model', 'Ref_Speed/1', 'Speed_Error/1');
add_line('PMSM_Speed_Control_Model', 'Speed_Error/1', 'PID_Controller/1');
add_line('PMSM_Speed_Control_Model', 'PID_Controller/1', 'Speed_Scope/1');
% 生成代码
rtwbuild('PMSM_Speed_Control_Model');代码分析:这段MATLAB代码创建了一个简单的PMSM速度控制Simulink模型,包括参考速度输入、速度误差计算、PID控制器和速度显示等模块。通过addblock函数添加模块,addline函数连接模块,最后使用rtwbuild函数自动生成代码。这样可以大大提高开发效率,减少手动编写代码的工作量。

stm32 永磁同步电机pcb,原理图 利用stm32f4xx制作的pmsm 控制器电路原理图,pcb,还有pmsm simulink模型 以及simulink模型代码自动生成来设计电机控制算法资料
通过以上步骤,我们完成了从电路原理图设计、PCB设计到Simulink模型代码自动生成的整个PMSM控制器设计过程。希望这些内容能对大家有所帮助,让大家在电机控制领域能够更加得心应手。


AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐



 1
1 0
0- 0



 已为社区贡献17条内容
已为社区贡献17条内容

所有评论(0)